1. Point Cloud Configuration¶
The point cloud used in collision detection usually includes the workobjects and some surrounding objects (such as the bin).
This point cloud is sent from Mech-Vision using the Send Point Cloud to External Service Step. Before you enable Detect collision between point cloud and others, please make sure that this Step is used in the corresponding Mech-Vision project.
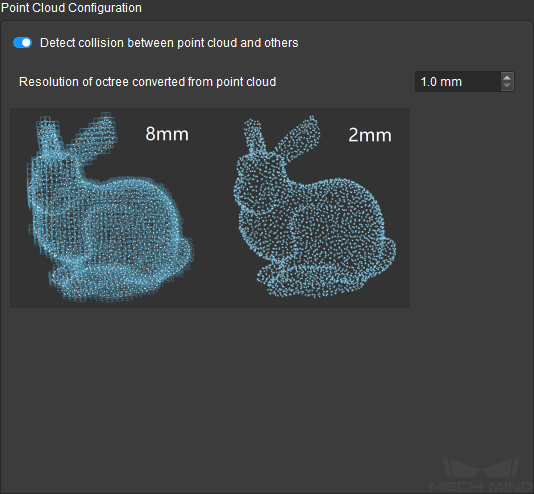
A point cloud is made of points, which are zero-dimensional and thus cannot be used for collision detection. Therefore, Mech-Viz converts the point cloud to an octree structure first. In the octree structure, the three-dimensional space is divided into little cubes, each centered around a point in the point cloud. Collisions with the point cloud are recognized when other objects come into contact with these cubes.
By adjusting Resolution of octree converted from point cloud, you can change the edge length of each little cube. In the figure below, the edge lengths are 10 mm (left) and 2 mm (right).

For the same point cloud:
The shorter the edge length of each cube, the more cubes, the more accurate the collision calculation, and the longer it takes to calculate collisions.
The longer the edge length of each cube, the fewer cubes, the less accurate the collision calculation, but the shorter it takes to calculate collisions.
Therefore, the edge length should be set based on your requirements for collision calculation accuracy and project execution speed.
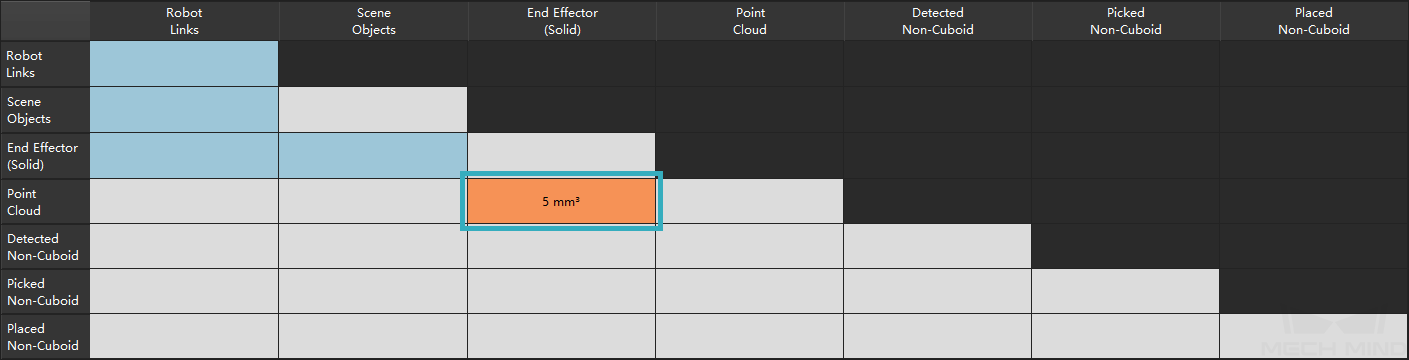
After you enable Detect collision between point cloud and others, Mech-Viz will check the collisions between the point cloud and robot tool (end effector), in addition to the default object pairs.