Collision Detection Configuration¶
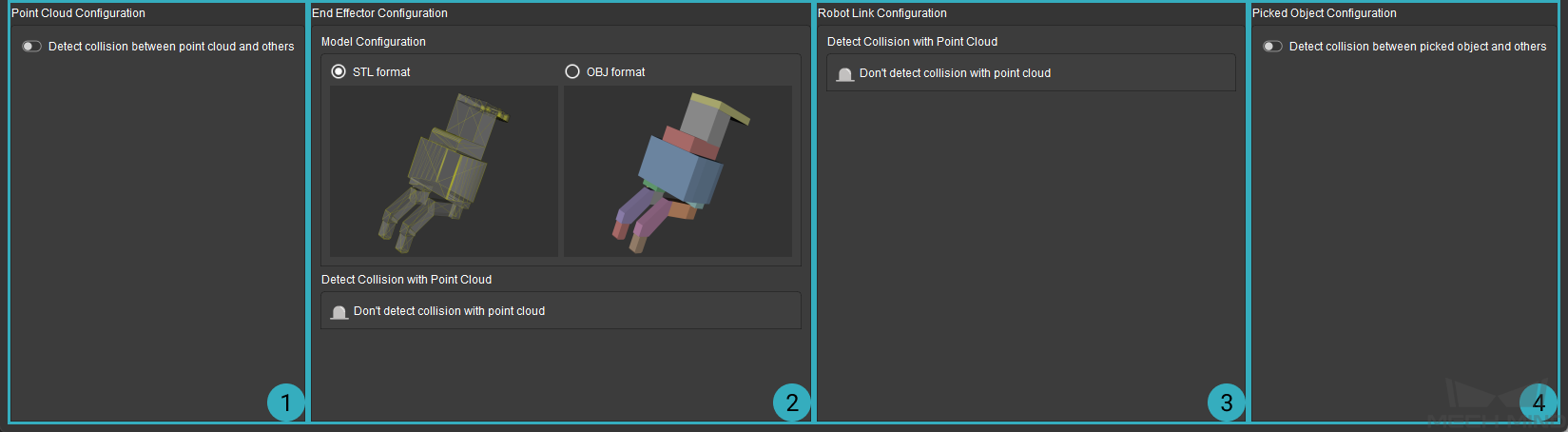
In this window, you can configure the following objects involved in collision detection:
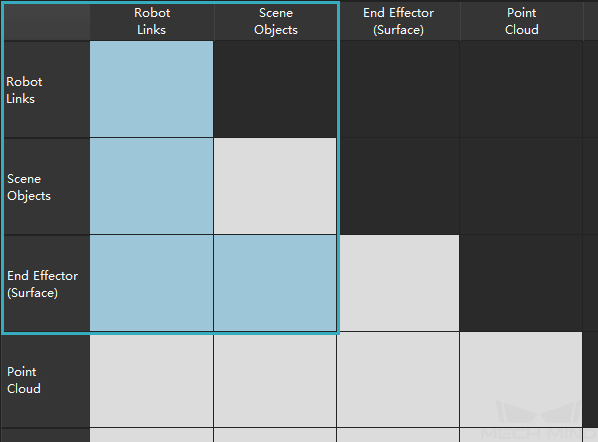
Please note that the following object pairs are checked for collision by default and cannot be configured:
Robot links and robot links
Robot links and scene objects
Robot links and robot tool (end effector)
Scene objects and robot tool