Rotational Symmetry and Picking Relaxation¶
This section introduces basics about rotational symmetry and picking relaxation.
The Rotational Symmetry of Tools¶
The tools specified here are also known as end effectors or grippers. The rotational symmetry is the property a tool has when it looks the same after some rotation by a partial turn. For example:
A rectangular vacuum gripper’s degree of rotational symmetry is 180°.

A 3-jaw lathe chuck’s degree of rotational symmetry is 120°.

The manifestation of rotational symmetry in respect of “parameters” |
The tool is symmetrical along the Z axis in the reference frame of the tool center point. |
The manifestation of rotational symmetry in respect of “picking” |
For an object in a fixed location, multiple picking poses that take the degree of rotational symmetry as a stepsize will lead to the same effect. |
The manifestation of rotational symmetry in respect of “placing” |
If the tool rotates a certain degrees for picking due to the application of tool’s rotational symmetry, the tool should rotate back to the original position when placing the workobject. |
The Rotational Symmetry of Workobjects¶
Workobjects refer to objects to be picked. A workobject’s degree of rotational symmetry is the number of distinct orientations in which it looks exactly the same for each rotation. For example:
A cylinder is rotationally symmetric in any directions.

A carton’s degree of rotational symmetry is 180°.

The manifestation of rotational symmetry in respect of “parameters” |
The workobject is symmetric about the X axis |
The degree of rotational symmetry |
The workobject is symmetric about the Y axis |
||
The workobject is symmetric about the Z axis |
||
The manifestation of rotational symmetry in respect of “picking” |
When the tool cannot rotate |
If the workobject rotates a certain angle whose degree is a multiple of the workobject’s degree of rotational symmetry, all the workobject poses after rotation can be regarded as the same. |
When the workpiece is in fixed location |
If the tool rotates a certain angle whose degree is a multiple of the workobject’s degree of rotational symmetry, the results of all the pickings can be regarded as the same. |
|
The manifestation of rotational symmetry in respect of “placing” |
If the tool rotates a certain degrees due to the application of workobject’s rotational symmetry, the tool does not need to rotate to the original position when placing the workobject. Workobjects that are expected to be placed in a specific pose do not have the rotational symmetry in the strictest sense, and picking relaxation should be applied in this case. |
|
Picking Relaxation¶
Picking relaxation describes the degree of flexibility when picking the object. It consists of angle relaxation and distance relaxation.
Angle Relaxation
Distance Relaxation
The TCP is regarded as coinciding with the object pose as long as the TCP stays within a certain distance on a specific plane related to the object.
The manifestation of picking relaxation in respect of “parameters” |
X Relaxation |
The threshold and stepsize of the relaxation |
Y Relaxation |
||
Z Relaxation |
||
The manifestation of picking relaxation in respect of “picking” |
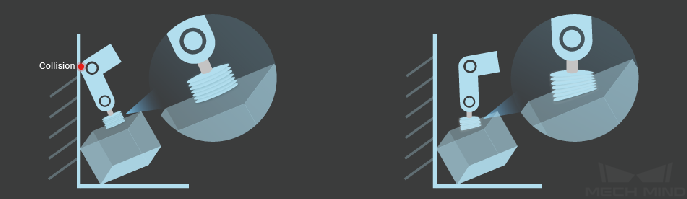
If the workobject is in fixed location, the robot will try picking poses that will not lead to collisions within the relaxation threshold. |
|
The manifestation of picking relaxation in respect of “placing” |
Placing according to the workobject pose |
The deviation in the workobejct’s pose due to the application of picking relaxation should be compensated at workobject placing. |
Placing according to the TCP |
The tool is moved to a specified position, while the workobject’s pose does not need to compensated. |
|