Workobjects Configuration¶
In atcual situations, there can be multiple solutions of the possible pick points when picking the same object. In order to increase the number of solutions and the success rate of picking, you can configure the Rotation Symmetry, Picking Relaxation, and other parameters of the objects in the Configuration of Objects to Pick panel.
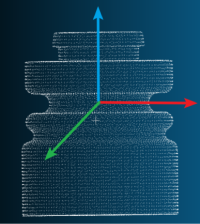
A Pick point represents the position on the object where the robot can pick. The point is determined in the object reference frame, and therefore its position and direction are relative to the object. Usually, the Z-axis in the pick point is pointing upwards, and the blue vector is the Z-axis as shown in the figure below.

This section covers the following topics:
Pick Point Selection Strategy¶
Both Mech-Viz and Mech-Vision contributes to the selection of pick point. The main process of selecting a pick point are as follows.
Mech-Vision filters and sorts the workobject poses according to the height of the plane in which the object is located, inclination of the object, etc.
Sort by either the X, Y, or Z value of the workobject pose
Sort by the distance between the candidate pose and reference pose
Filter the invalid poses according to the angle between the candidate pose and reference pose
In order to avoid collision when picking the object, based on the workobject pose list sent by Mech-Vision, Mech-Viz will take the object rotational symmetry and picking relaxation into consideration when selecting the pick point.
Select the pick point according to the order of the workobject pose list sent by Mech-Vision
If there is a risk of collision when picking the object whose pose is listed first, Mech-Viz will try another pick point on the same object considering the rotation symmetry, picking relaxation and the optimal picking solution strategy set by the user.
If neither pick point is feasible on the object whose pose is listed first, Mech-Viz will select the pick point based on the next workobject pose in the list.
Symmetry of the Pick Point¶
Note
The “Symmetry” in this chapter refers to “rotational symmetry”.
A pattern with rotational symmetry will coincide with itself after rotating around a certain point by a certain angle. The point is the center of rotation, and the angle it rotates is the angle of rotational symmetry.
In actual projects, the objects to be picked often have rotational symmetry. The robot can pick or place the same object in different ways, and there is no impact on the result of picking or placing. This section will describe the following 3 situations.
Objects Without Rotational Symmetry¶

|
|
|
|
Track pad of the bulldozer |
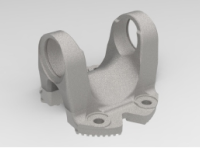
Drive shaft flange yoke |
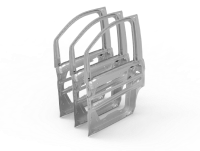
Sheet metal of the car door |
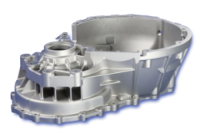
Transmission bell housing |
When the object does not have rotational symmetry, and the end effector is not made of soft material and cannot move in a relatively flexible way, and the obejcts must be placed accurately, please keep the default settings (No X/Y Symmetry, Z Step 360°, Try Range ±180°).

Application Example:
Both the end effector and workobject in the figure below do not have rotational symmetry, and the object must be placed on the platform in a specified pose.
Objects Symmetric about the X/Y-Axis¶
|

|

|

|
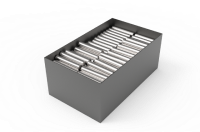
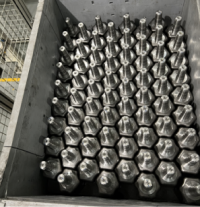
Highly reflective steel rods that are arranged neatly |
Steel rods that are stacked randomly |
Oil pipe inserts |
Bolts |
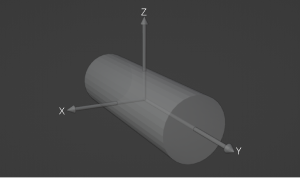
If the end effector is not made of soft material and cannot move in a relatively flexible way, and the object is in the shape of rods or bars with curved surface, the objects are usually symmetric about the X-axis or Y-axis. However, it is not symmetric about the Z-axis.
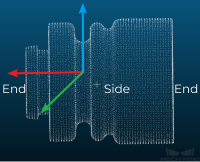
The workpiece in the figure below is symmetric about the Y-axis by any angle of rotational symmetry (360°).
Step: Please set to a proper value. A value that is too small may increase the planning time; while a value that is too large may result in missing the pick point.
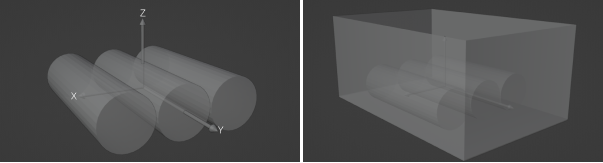
Try Range: The value of Try Range is usually determined by the exposed area of the side of the workpiece. As shown below, the angle of rotational symmetry of the workpiece is 360°. However, since the workpiece is placed in a bin and surrounded by other workpieces, the pickable range is much less than 360°.
Note
The selection of the axis about which the object rotates depends on the settings of pick point in Mech-Vision.
In the left figure, the Y-axis of the pick point is the axis of rotation. While in the right figure, the X-axis of the pick point is the axis of rotation.

Application Example:
The small workpieces are stacked randomly, and they have an angle of rotational symmetry of 360° about the X-axis of the pick point.

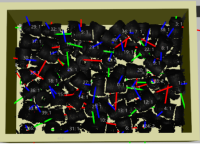
Color image
Point cloud
Side view of the pick point
The settings of rotational symmetry are shown below.

Objects Symmetric about the Z-axis¶
|
|
|

|
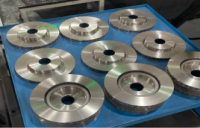
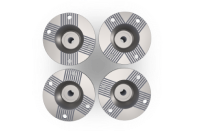
Disc brake (360°) |
Flange (180°) |
Outer race of the Rzeppa joint (60°) |
Carton (180°) |
For objects that are symmetric about the Z-axis, such as cartons, discs, and colums, the end effector can rotate around the Z-axis of the pick point to pick the object, even if the end effector does not have rotational symmetry itself.
If you consider the patterns in the figure below as top views of the workpieces on a table, all objects have rotational symmetry about the Z-axis.

Plan both picking and placing (The object should be placed accurately)
Please set the Z Step to the angle of rotational symmetry value of the object.
Note
If the object is rotational symmetric by any angle, it is recommended to set the Z Step to no less than 10° to avoid a slow planning.

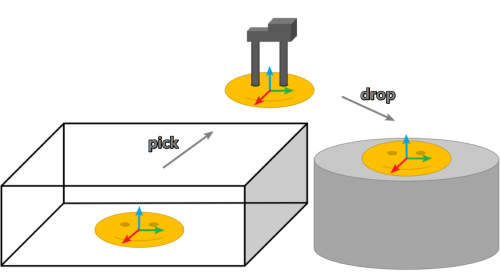
Plan the picking but not placing (The object does not have to be placed accurately)
Under this circumstance, the end effector is only required to pick the object accurately, and the rotational symmetry of the object need not to be considered. You can set the Z Step according to the scenario where the object is rotational symmetric by any angle.
The example scenarios are as follows:
In novel picking scenario, a suction cup is used to pick the objects and drop them to a specified position or into a bin.
When an electromagnet is used to pick metal parts, it will pick the metal parts first and then drop them to a specified position or into a bin.
Application Example:
For workpieces that are symmetric about the X-axis or Y-axis, they can be considered as being symmetric about the Z-axis if they will be picked from the top end which is facing upwards.
The settings of rotational symmetry are shown below.

Picking Relaxation¶
When the end effector is made of soft material or the object is adaptable to various picking methods, a certain angle deviation between the end effector and the object can be allowed when picking. Principally, picking relaxation is a tolerance based on the pick point. By setting the picking relaxation, the robot can utilize such tolerance flexibly to avoid problems such as collisions and singularities.
The two common usage scenarios are as follows:
End Effector Made of Soft Material¶
The figure below shows the scenario where a suction cup is used to pick parcels.
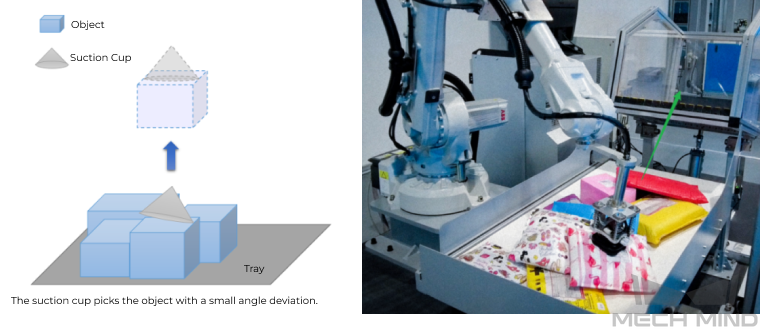
Since the sponge attached to the end of the suction cup is soft, a certain angle deviation on the X-axis direction and Y-axis direction is allowed during picking. Therefore, the picking relaxation can be set. According to the allowable deformation of suction cup, it is recommended to set the Try Range to ±5°~±10°, and the Step to 2°~5°.

Use both Rotational Symmetry and Picking Relaxation
The parcels in the above figure have 90° rotational symmetry about the Z-axis, and therefore you can set the No X/Y Symmetry and the corresponding Step as shown below.

Attention
During the path planning, the Try Times Per Pose of Rotational Symmetry will be multiplied by that of Picking Rlaxation, and the takt time will be increased if there are too many try times.
Accurate Placing Not Required¶
The figure below shows the scenario where an end effector picks an track link. The track link does not have rotational symmetry. When the end effector picks the track link, the end effector can rotate around the Y-axis direction by a certain angle. The Z-axis of the tool pose before picking is vertical down, and the tool pose will change after rotating. The end effector should offset the angle it rotated when placing the object. Since the object does not have to be placed accurately, the change of the tool pose will not affect the final placing result.

The settings of picking relaxation are shown below.

Optimal Pick Point Selection Strategy¶
The Optimal Pick Point Selection Strategy panel is shown below.

The descriptions of the modes are as follows.
Default: When the Default mode is selected, the Minimum Global Rotation strategy will be utilized.
Minimum Global Rotation: When this mode is selected, during the whole pick-and-place process, pick point that causes the minimum rotation degree of the end effector’s Z-axis will be defined as the optimal pick point. The advantage of this mode is that it can prevent the end effector from rotating in vain after picking the object, and avoid falling the picked object.
Minimum Rotation Difference with Vision Pose: When this mode is selected, the pick point that has the minimum angle of deviation with the workobject pose sent by Mech-Vision will be defined as the optimal pick point. Assuming that the workobject pose is [0,0,0,15,0,0], and the Z step of the object is set to 60°, the robot will prioritize to pick the workobject with pose [0,0,0,75,0,0] and [0,0,0,-45,0,0].