Interface of Workflow¶
The Workflow panel is the main interface for robot programming, and it mainly consists of 4 areas.
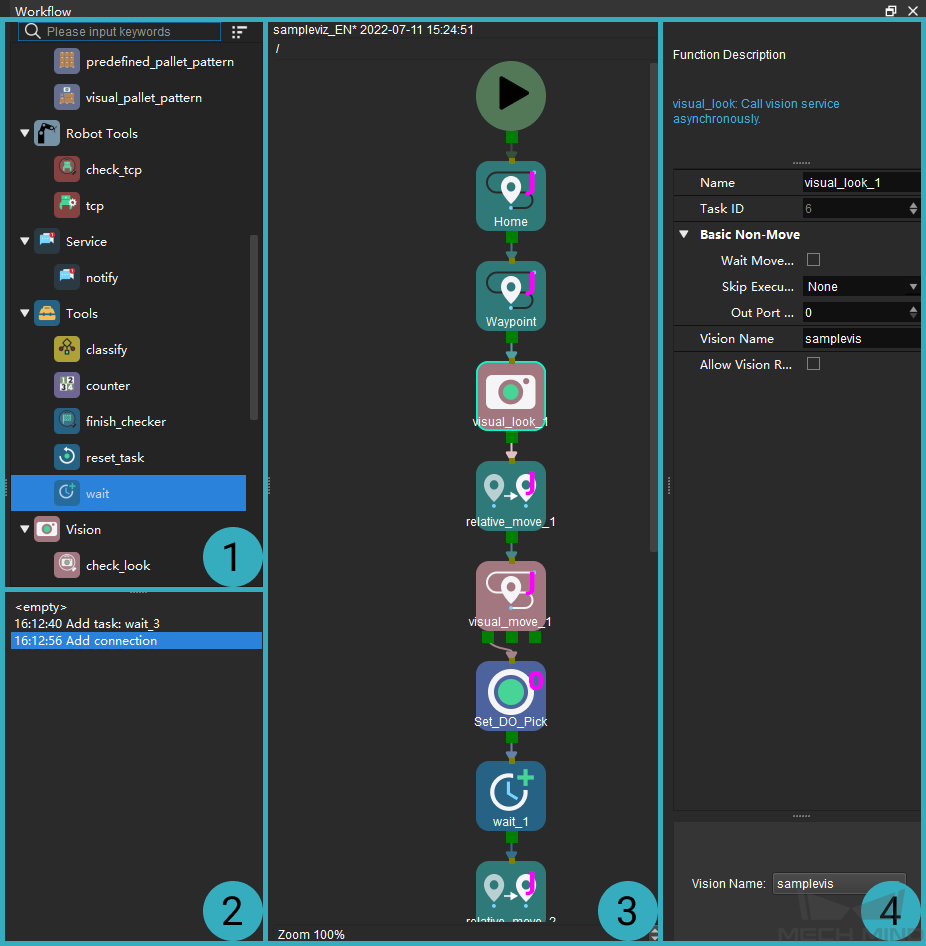
- The Workflow tab consists of four areas:
Task library
Programming record
Graphical programming workspace
Parameter panel
Task Library
A Task is a graphical programming module used to enable a specific function. Tasks are the basis of robot programming in Mech-Viz. By default, only the frequently used Tasks are displayed in the Task Library.

Click to display all Tasks

Click to display frequently used Tasks only
Right click and select Show all in the context menu to display all Tasks
Right click and select Show only the frequently used in the context menu to display frequently used Tasks only
Right click and select Expand all in the context menu to expand all Task categories
Right click and select Collapse all in the context menu to collapse all Task categories
All Tasks are divided into various Task categories according to their functions. For example, “Basic Move” includes Tasks related to basic motions of the robot, such as move, relative_move, and move_grid.
In addtion, the Tasks can be categorized as “move-type Tasks” and “non-move Tasks”, as shown in the table below.
Move-type Tasks
All Tasks that belong to “Basic Move” and “Pallet” categories and the Task visual_move
Non-move Tasks
All Tasks that are not categorized as “move-type Tasks”
Programming Record Area
All your actions in the graphical programming interface and parameter panel are recorded here.
Click on a record to return the workflow to that point in time.
Note
If you clicked on an older record and then performed some new action, the records newer than the one you clicked on are removed, and the new action is recorded right after the clicked record.
Graphical Programming Workspace
Here you can connect Tasks to program the robot. Selecting and connecting the Tasks properly is the core of constructing a Mech-Viz project. For detailed instructions, please refer to Basic Features of Skills.
Parameter Panel
Select a Task in the workflow to display all its parameters here.
If you check Function Description in the View menu, a brief description of the selected Task is also displayed at the top of the parameter panel.