로봇 통신 구성
비전 시스템 하드웨어 구축 단계에서는 비전 시스템과 로봇 시스템의 하드웨어 통합을 완료하고, 로봇 통신 구성 단계에서는 두 시스템 간의 통신 통합을 완료합니다. 이를 통해 비전 시스템과 로봇 측이 실시간으로 정확하게 데이터를 교환할 수 있습니다.
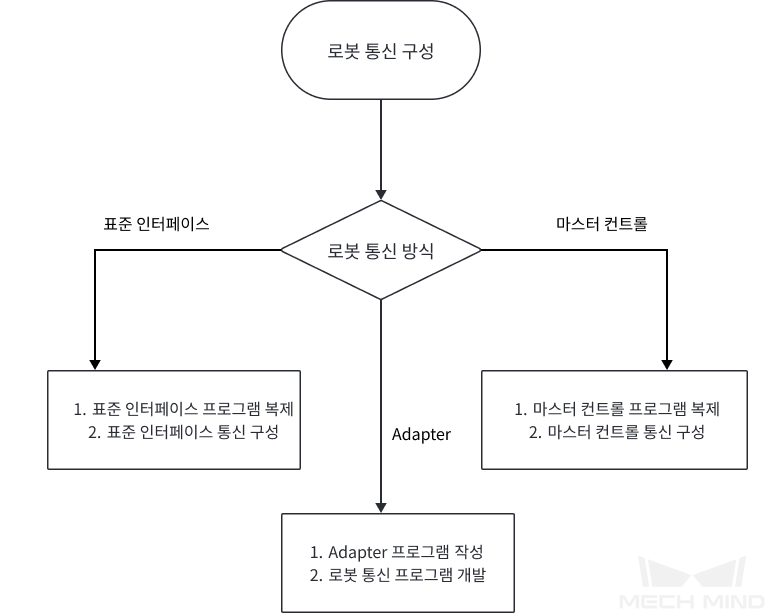
로봇 통신 구성은 일반적으로 Mech-Mind에서 제공된 통신 프로그램 및 구성 파일을 로봇 시스템으로 도입하여 해당 통신 구성을 완료해야 합니다.
비전 솔루션 설계 단계에서 선택한 로봇 통신 방법에 따라 이 단계에서 완성해야 하는 구성도 달라집니다.
-
비전 솔루션 설계 단계에서 표준 인터페이스 통신 방법을 선택한 경우, 이 단계에서는 로봇 표준 인터페이스 프로그램 및 구성 파일을 로봇 시스템으로 도입하여 표준 인터페이스 통신과 관련된 구성을 완료해야 합니다.
로봇이나 PLC 브랜드에 따라 표준 인터페이스 적용 목록에서 표준 인터페이스 통신에 대한 매뉴얼을 찾을 수 있습니다.
-
비전 솔루션 설계 단계에서 마스터 컨트롤 통신 방법을 선택한 경우, 이 단계에서는 로봇 마스터 컨트롤 프로그램과 구성 파일을 로봇 시스템에 복제하고 마스터 컨트롤 통신과 관련된 구성을 완료해야 합니다.
로봇 브랜드에 따라 마스터 컨트롤 적용 목록에서 표준 인터페이스 통신에 대한 매뉴얼을 찾을 수 있습니다.
-
비전 솔루션 설계 단계에서 Adapter 통신 방식을 선택한 경우, 이 단계에서는 비전 시스템용 Adapter 프로그램과 로봇측용 해당 로봇 통신 프로그램을 작성해야 합니다.
Adapter는 맞춤형 통신 방법이므로 사용자의 프로그래밍 기술에 높은 수준의 능력을 요구합니다. Adapter 통신에 대한 자세한 내용은 Adapter 통신 내용을 참조하십시오.