ロボット通信設定
本ガイドでは、標準インターフェースプログラムをYaskawaロボットに読み込む方法を習得し、Mech-Mindビジョンシステムとロボット間の標準インターフェース通信設定を行います。
|
事前準備
ハードウェアとソフトウェアバージョンを確認
-
Yaskawaの6軸ロボットを使用していることを確認します。本ガイドでは、YASKAWA_GP8ロボットを使用しています。
-
ロボットコントローラはYRC1000、YRC1000microまたはDX200であることを確認します。本ガイドでは、YRC1000のコントローラを使用しています。
-
Yaskawaロボットのイーサネット機能が有効になっていることを確認します。
(クリックして展開)詳細方法
-
ティーチペンダントの
MAIN MENUキーを押しながらロボットの電源を入れると、メンテナンスモード になります。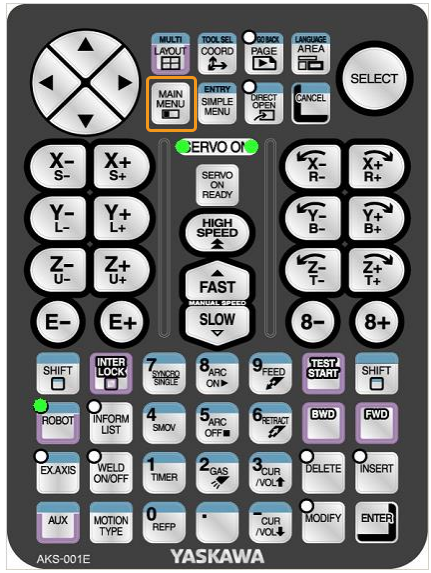
ロボットがすでに起動している場合は、 MAIN MENUキーを押しながらロボットを再起動します。 -
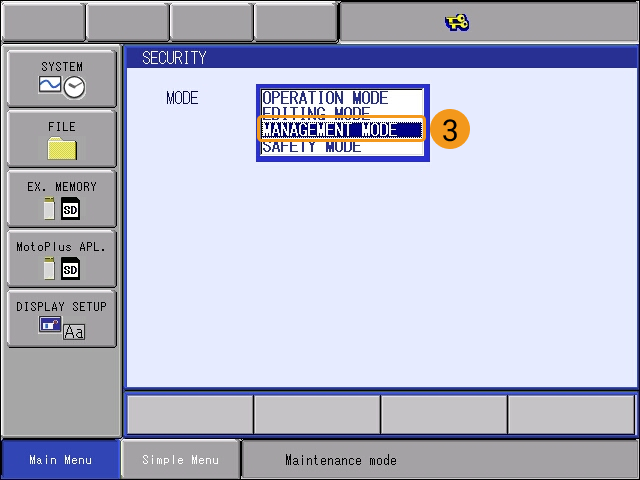
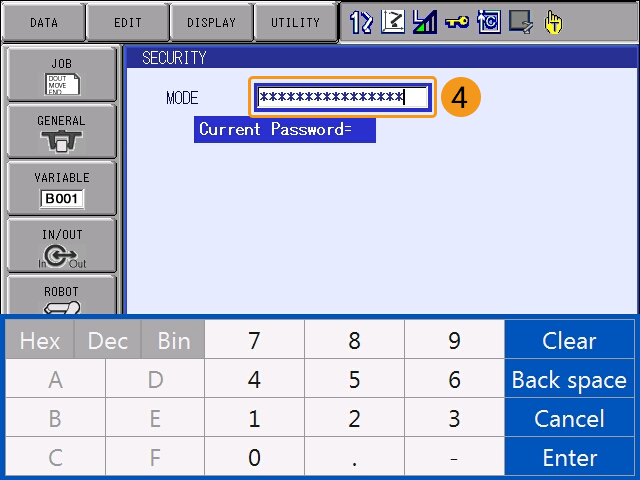
メンテナンスモードでは、を選択します。

-
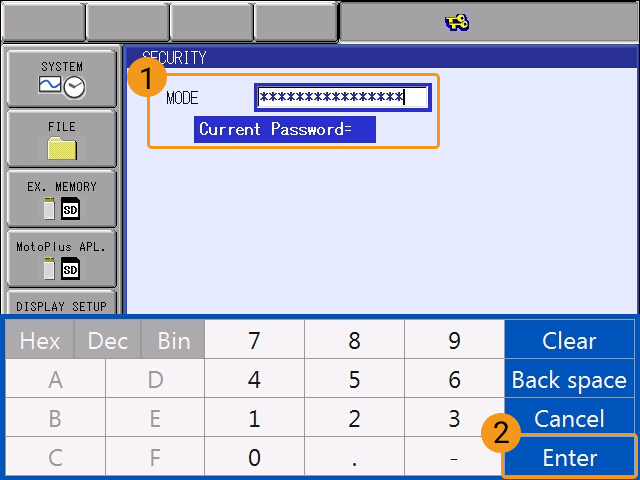
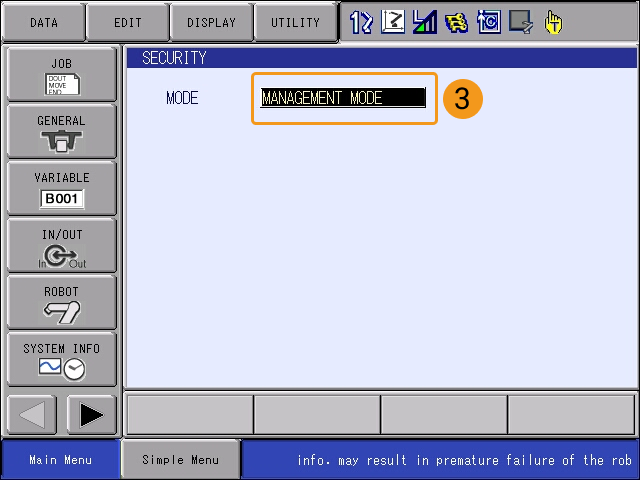
パスワードを入力し、 ENTER をクリックして MANAGEMENT MODE になります。デフォルトのパスワードは16個の「9」です。
-
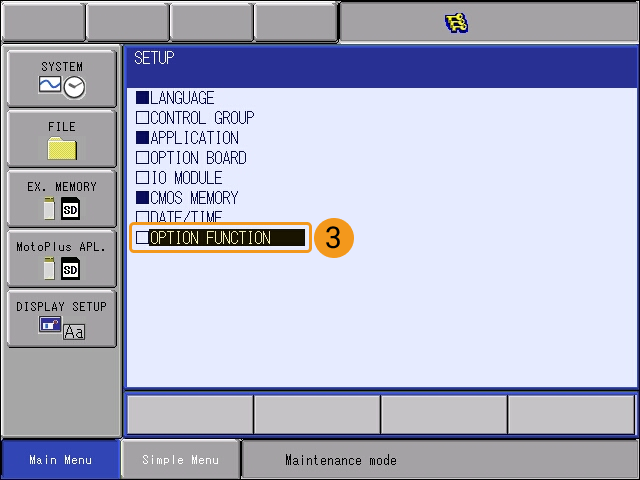
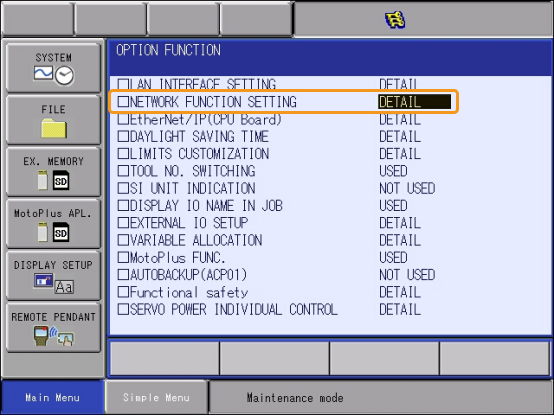
Main Menu からをクリックし、オプション機能の画面に入ります。次に、NETWORK FUNCTION SETTINGのDETAILをクリックし、ティーチペンダントの
SELECTキーを押してネットワーク機能設定の画面に入ります。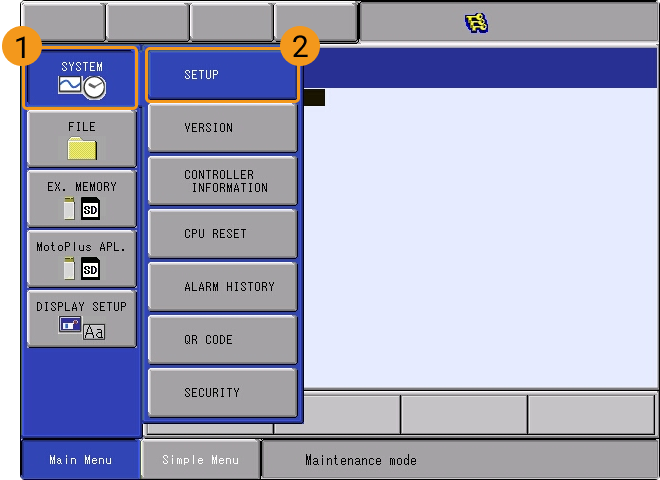
-
イーサネットが USED と表示されているか確認します。
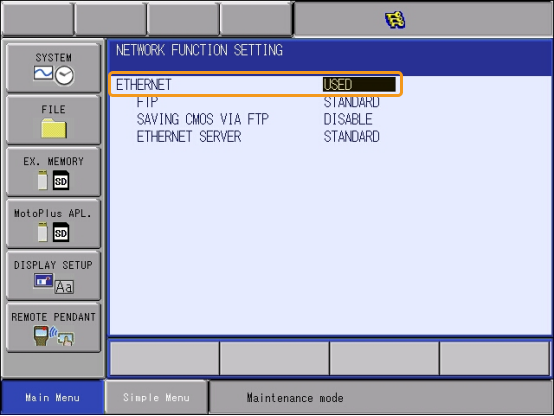
ステータスが「UNUSED」の場合は、ロボットメーカーにお問い合わせください。
-
-
YaskawaロボットのMotoPlus機能が有効になっていることを確認します。
(クリックして展開)詳細方法
-
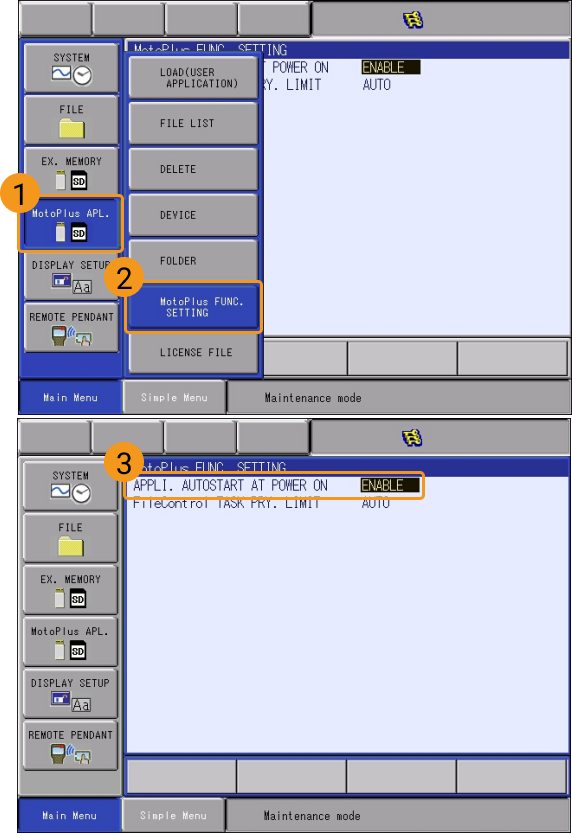
メンテナンスモードの管理モードでは、Main Menuからを選択します。
-
MotoPlus FUNC.SETTINGの画面で、APPLI. AUTOSTART AT POWER ON ステータスが ENABLE と表示されているか確認します。
-
「DISABLE」である場合、DISABLEを選択し、ティーチペンダントの
SELECTキーを押すと、「ENABLE」になります。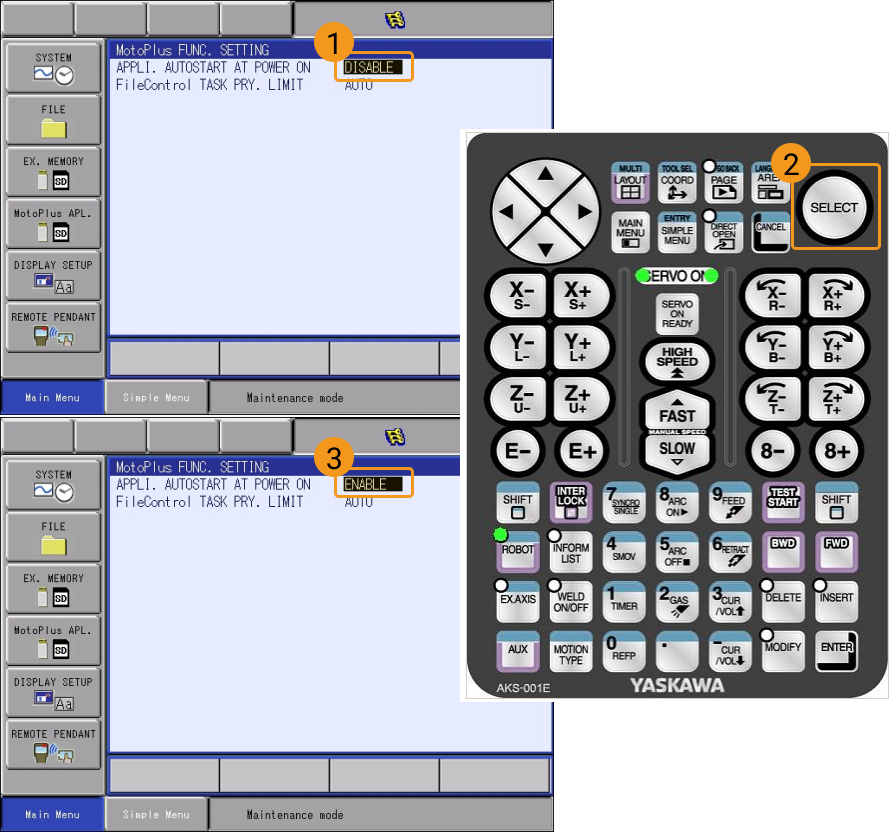
-
|
上記の条件を満たしていない場合は、標準インターフェース通信ができませんので、ロボットメーカーにお問い合わせください。 |
ネットワーク接続
-
IPCのLANケーブルのもう一端をコントローラのCPUボードのLAN2(CN106)ポートに接続します。
DX200シリーズのコントローラを使用している場合は、IPCのLANケーブルのもう一端をコントローラのCPUボードのCN104ポートに接続します。 -
YaskawaロボットのIPアドレスが、IPCのIPアドレスと同じネットワークセグメントにあることを確認します。
(クリックして展開)詳細方法
-
メンテナンスモードの管理モードでは、Main Menuからをクリックし、オプション機能の画面に入ります。次に、LAN INTERFACE SETTINGのDETAILをクリックし、ティーチペンダントの
SELECTを押すと、LANインターフェース設定の画面が表示されます。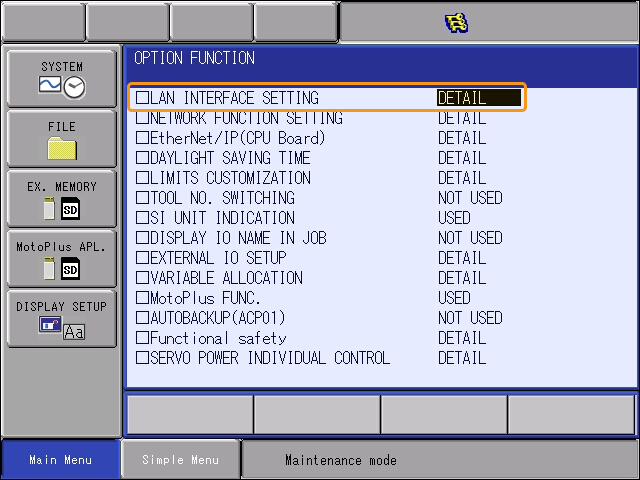
-
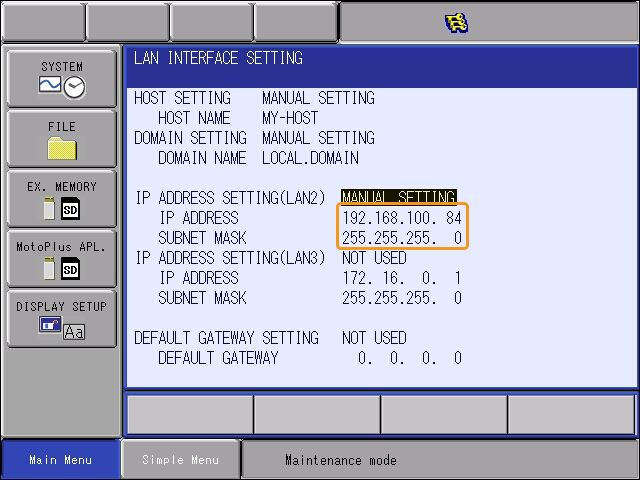
ロボットのIPアドレス(LAN2ポートのIPアドレス)を確認します。
-
ロボットのIPアドレスが、IPCのIPアドレスと同じネットワークセグメントにあることを確認します。同じネットワークセグメントにない場合、IPCのIPアドレスを設定を参照してIPCのIPアドレスを設定します。
-
Mech-Visionソリューションの作成と保存
-
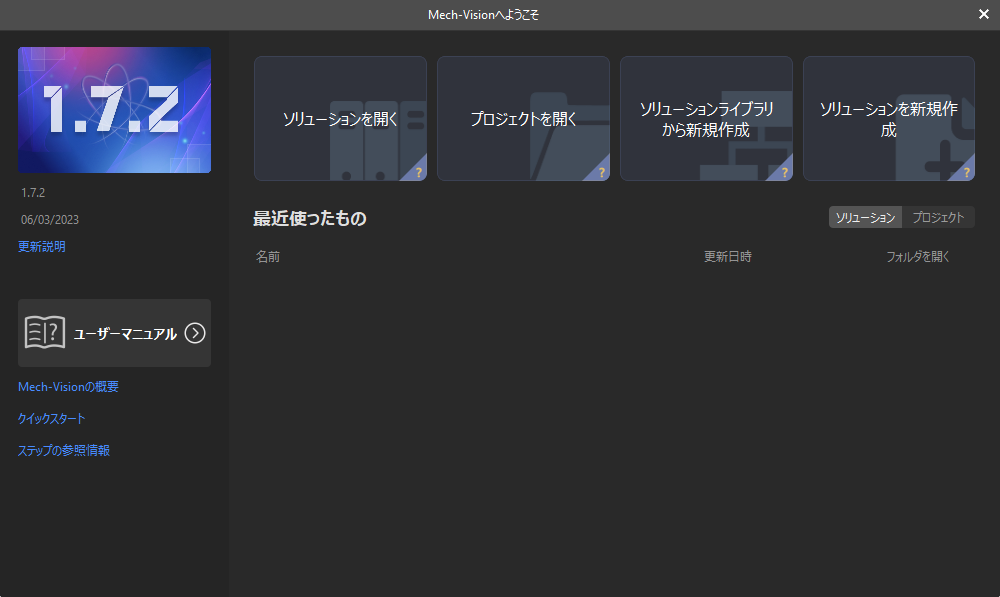
Mech-Visionを起動すると、下図のようなようこそ画面が表示され、Mech-Visionが正常に起動されたことを示します。
-
Mech-Visionのようこそ画面で ソリューションライブラリから新規作成 をクリックし、ソリューションライブラリを開きます。
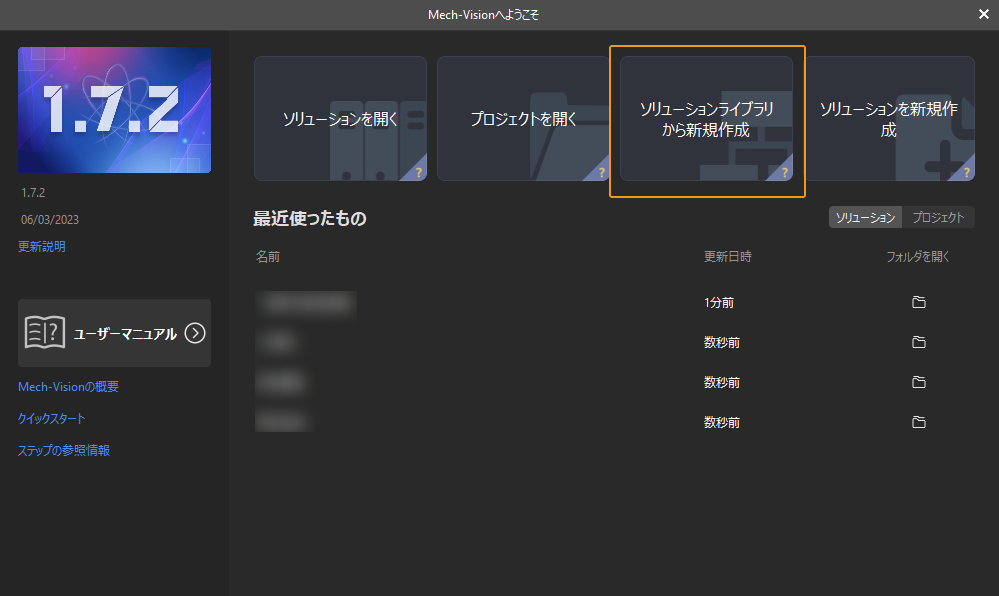
ソリューションライブラリには、異なる業界に適応可能なソリューションやプロジェクトのソースライブラリが含まれています。
-
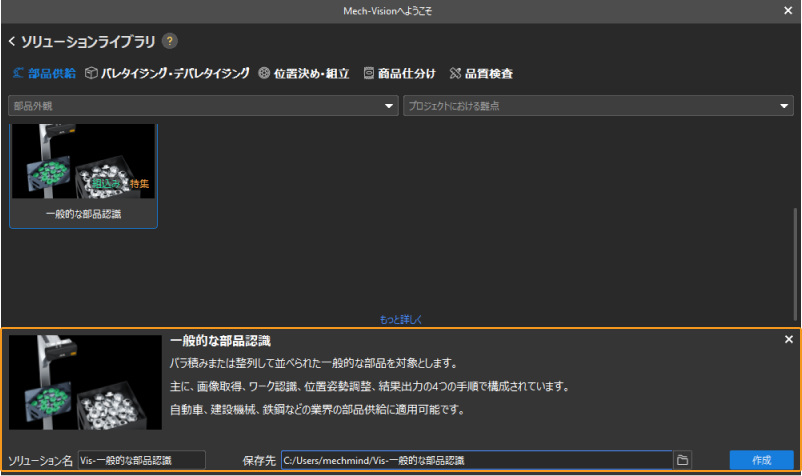
ソリューションライブラリを開いた画面を下図に示します。 一般的な部品認識 プロジェクトを選択します。

ソリューションライブラリからこのプロジェクトが見つからない場合、画面下部にある もっと詳しく をクリックします。
-
このプロジェクトをクリックして選択すると、プロジェクトの関連情報は画面下部に表示されます。ソリューション名と保存先を設定したら、 作成 をクリックします。
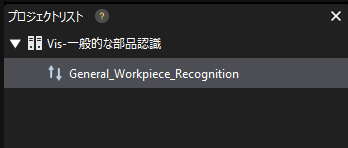
プロジェクトが作成されると、Mech-Visionメイン画面の左上にあるプロジェクトリストに、作成されたソリューションとプロジェクトが表示されます。
-
ソリューションとは、ビジョンソリューションを実現するために必要なロボットと通信、ビジョン処理、経路計画などの機能設定とデータの集りのことです。
-
プロジェクトとは、ソリューションにおけるビジョン処理のワークフローです。通常、1つのプロジェクトを含むソリューションで十分ですが、複雑な適用シーンでは複数のプロジェクトが必要になる場合があります。本ガイドに使用されるソリューションでは、1つのプロジェクトしか必要ありません。
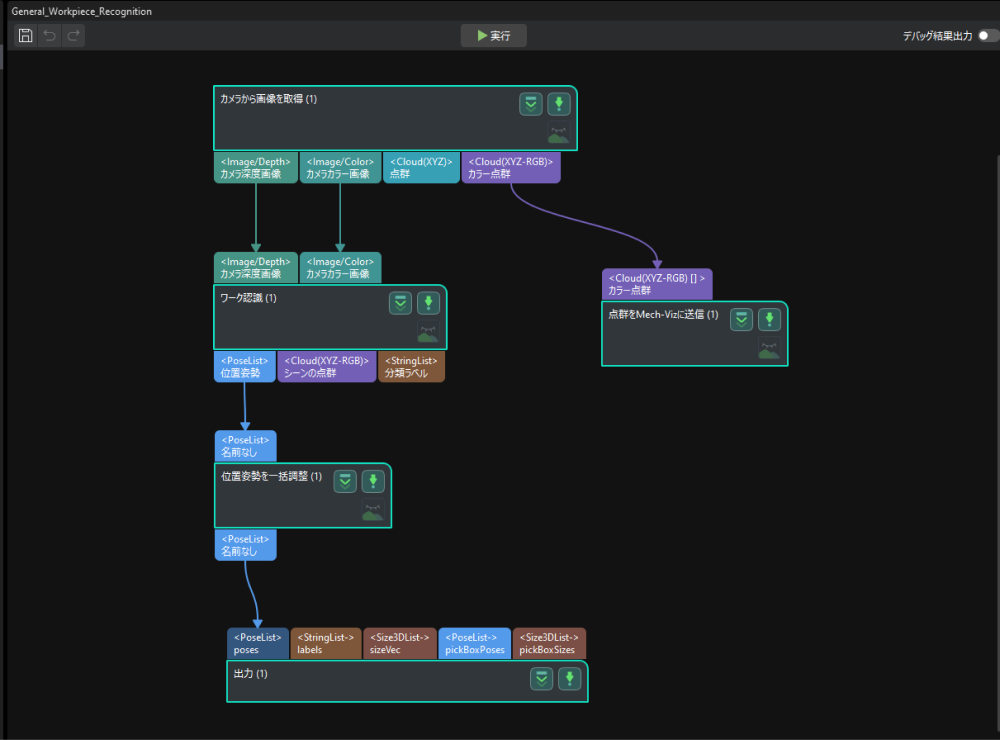
メイン画面中央のプロジェクト編集エリアには、「一般的な部品認識」というプロジェクトが表示されます。
-
-
プロジェクトリストでこのソリューションを右クリックし、ソリューションを自動的に読み込むにチェックを入れます。
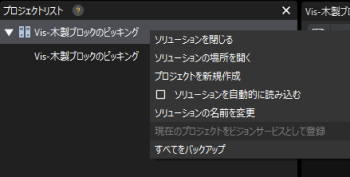
ソリューションが自動読み込みに設定されている場合、プロジェクト名が緑色で表示され、プロジェクト名の左側にプロジェクト番号が表示されます。
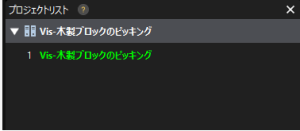
プロジェクト番号は、ロボットの把持・配置アプリケーションでMech-Visionプロジェクトの実行をトリガーするために使用されます。 -
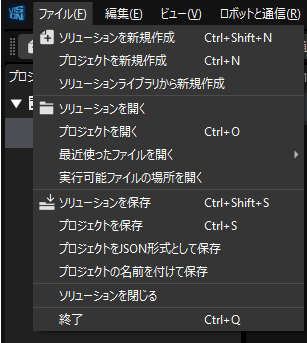
メニューバーからを選択します。
「ロボット通信設定」を実行
-
Mech-Visionのツールバーで ロボット通信設定 をクリックします。
-
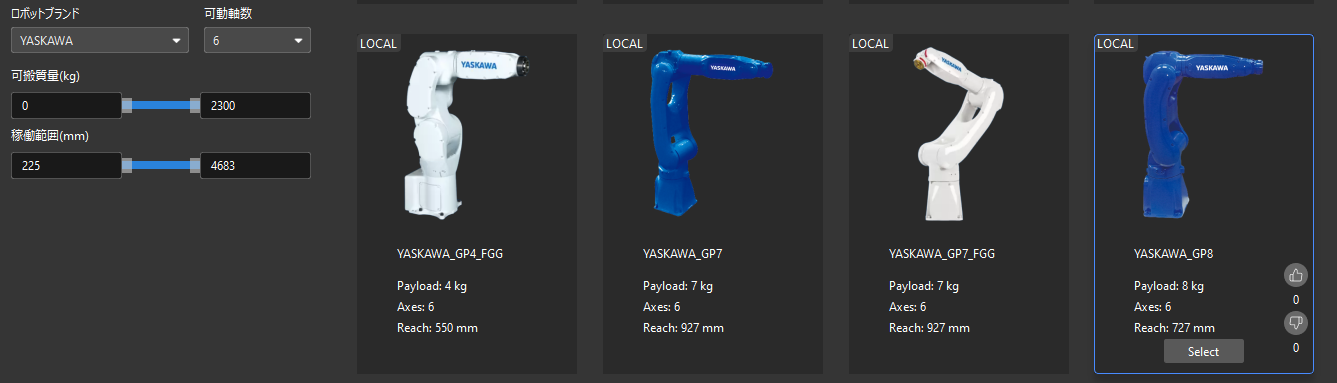
ロボットを選択 のドロップダウンボックスをクリックし、 適応可能なロボット を選択して ロボット型番を選択 をクリックします。表示される画面で「YASKAWA_GP8」を選択して 次へ をクリックします。
-
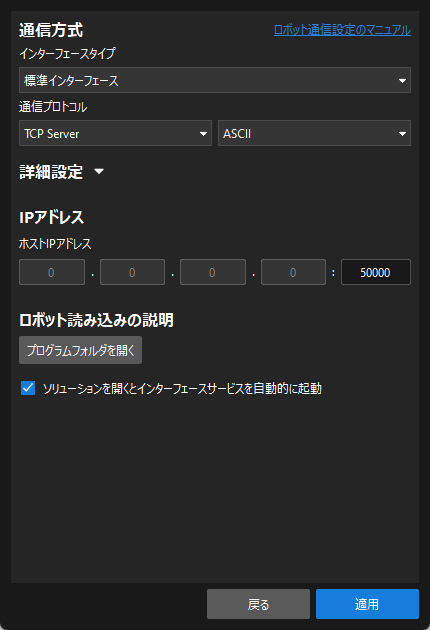
通信方式 の画面で、インターフェースタイプを 標準インターフェース に、通信プロトコルを TCP Server に、プロトコル形式を ASCII に選択してから、 適用 をクリックします。
-
Mech-Visionのメイン画面で、ツールバーのインターフェースサービスが起動されていることを確認します。

読み込みファイルの準備
-
IPCで、Mech-Mindビジョンシステムのインストールディレクトリにある
Mech-Center/Robot_Interface/YASKAWAフォルダを開きます。 -
JBIフォルダ、sampleフォルダおよびmm_module_yrc1000.outファイルをコピーしてUSBメモリのルートディレクトリに貼り付けます。
-
mm_module_yrc1000.outファイル:バックグラウンドプログラムファイルとなります。
-
JBIフォルダ:フォアグラウンドプログラムファイルを格納しています。
-
sampleフォルダ:簡単な把持・配置のサンプルプログラムを格納しています。
DX200型番のコントローラを使用している場合は、mm_module_dx200.outというバックグラウンドプログラムファイルをコピーする必要があります。
-
-
USBメモリをティーチペンダントの背面にあるUSBポートに挿入します。
MotoPlusで他のプログラムが実行されていないことを確認
ロボットプログラムをロボットに読み込む前に、他のMotoPlusプログラムが実行されていないことを確認してください。
-
実行中のプログラムがない場合は、この手順をスキップしてください。
-
実行中のプログラムがある場合は、それを削除してください。
(クリックして展開)詳細方法
-
メンテナンスモードの管理モードでは、Main Menuからを選択します。
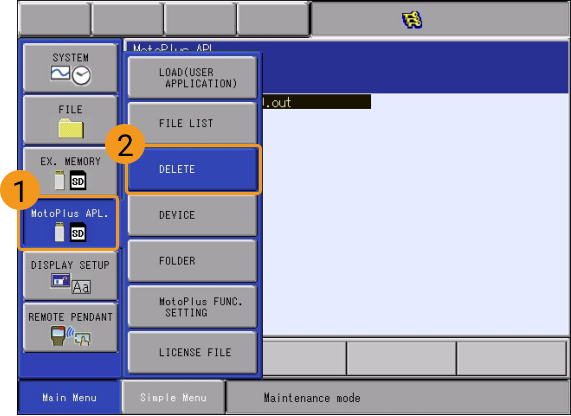
-
削除画面では、削除するプログラムファイルを選択し、ティーチペンダントの
SELECTを押してそのファイルを選択します。
-
ティーチペンダントの
ENTERキーを押し、ポップアップダイアログボックスのYESボタンをクリックしてプログラムを削除します。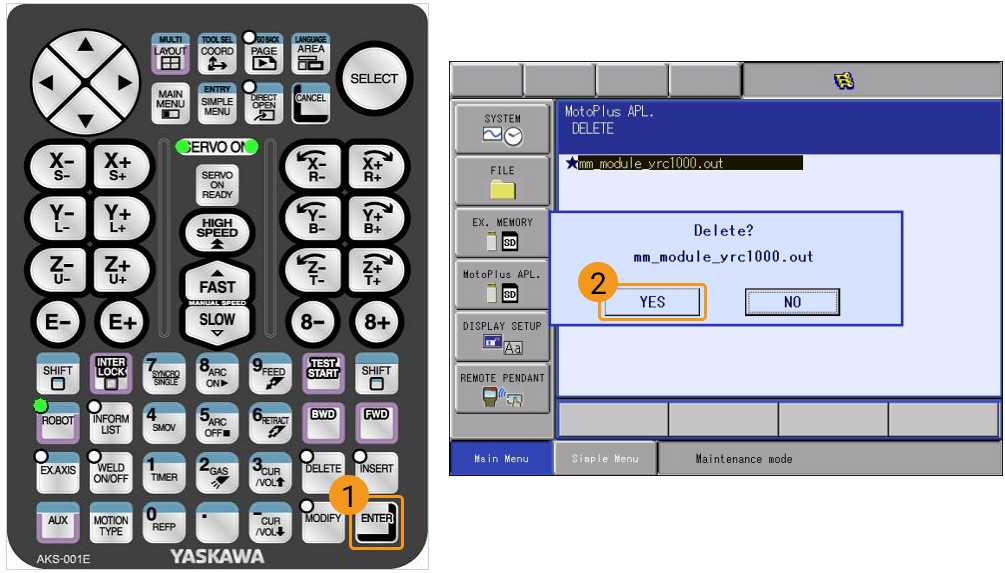
-
ファイルの読み込み
バックグラウンドプログラムファイルの読み込み
-
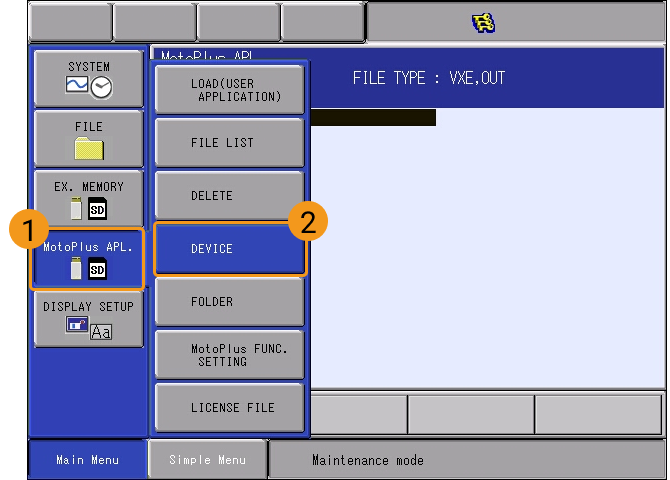
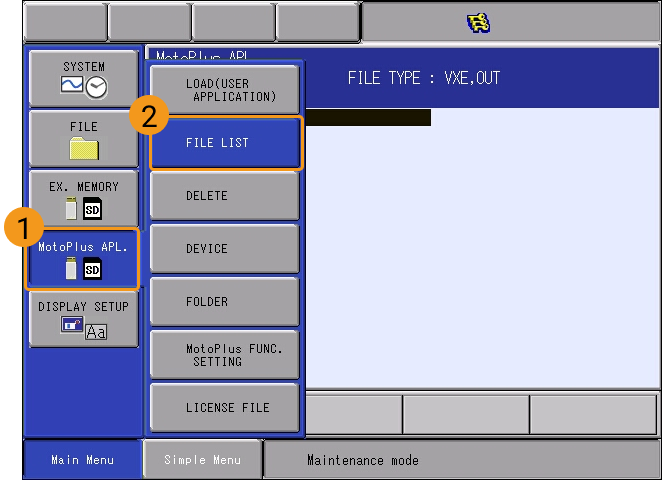
メンテナンスモードでは、Main Menuから を選択します。
-
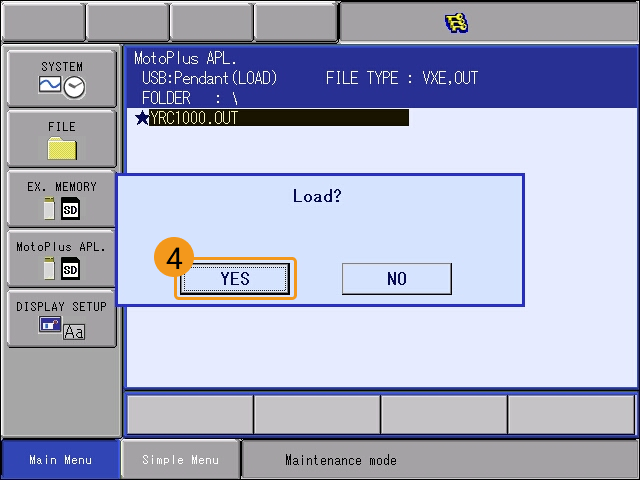
を選択し、 mm_module_yrc1000.out を選択します。次に、ティーチペンダントの
ENTERキーを押してYESを選択し、インストールを実行します。
DX200型番のコントローラを使用している場合は、ここではmm_module_dx200.outを選択する必要があります。 -
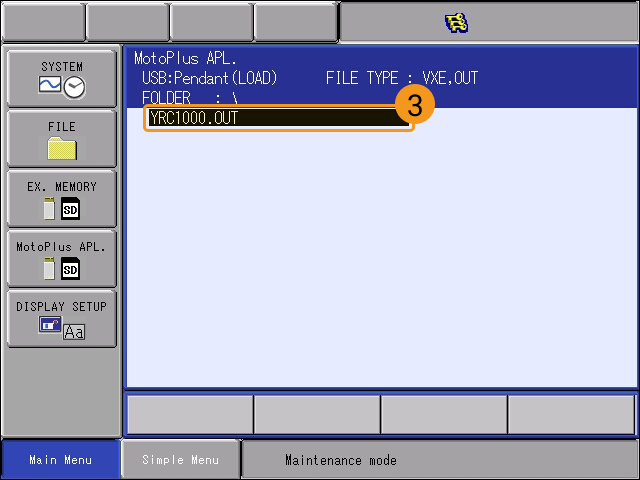
インストール後、を選択します。インストールされたファイルにバックグラウンドプログラム(YRC1000.OUT)が表示されていれば、バックグラウンドプログラムのインストールは成功です。
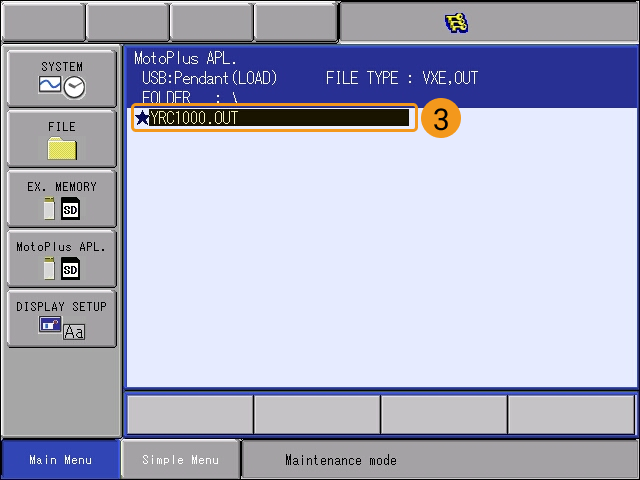
DX200型番のコントローラを使用している場合は、表示されたプログラムはDX200.OUTとなります。 -
バックグラウンドプログラムファイルが読み込まれた後、ロボットを再起動するとオンラインモードになります。
フォアグラウンドプログラムファイルとサンプルプログラムファイルを読み込むには、オンラインモードで操作する必要があるため、この操作はバックグラウンドプログラムの読み込みが完了してから行ってください。
フォアグラウンドプログラムファイルの読み込み
-
オンラインモードでは、Main Menuから をクリックし、MANAGEMENT MODEを選択します。パスワード(デフォルトのパスワードは16個の9)を入力します。
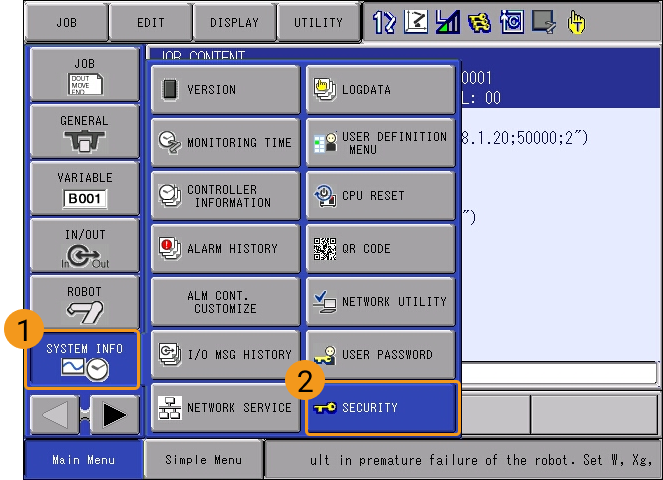
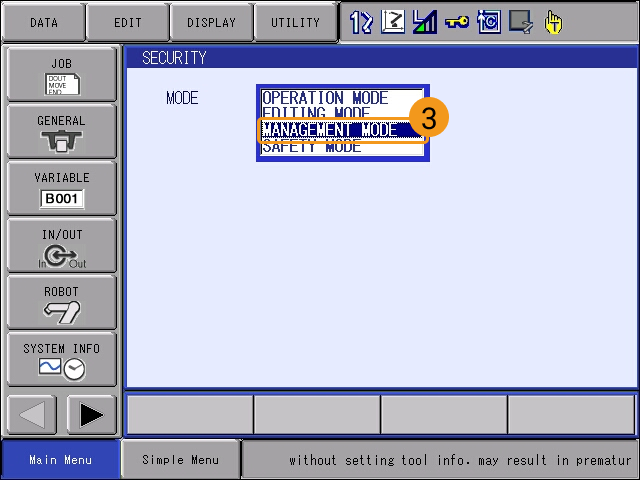
パラメータを入力した後、ティーチペンダントの右下隅にある
ENTERキーを押して管理モードに切り替えます。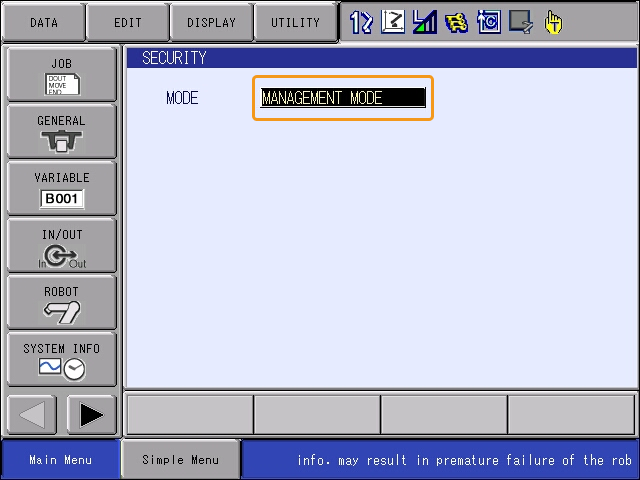
-
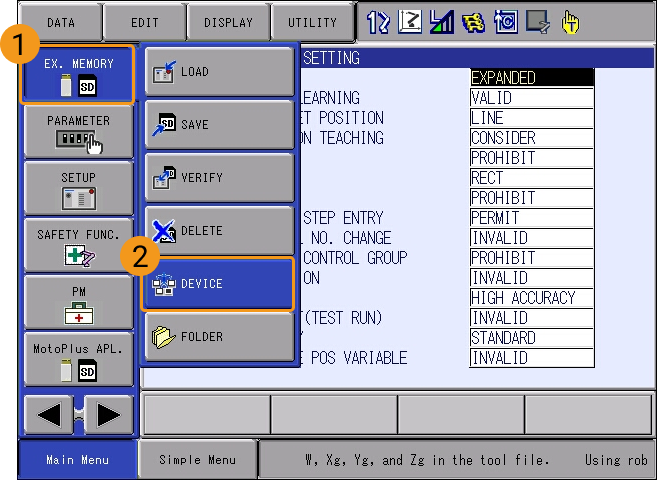
ティーチペンダントパネルの左下隅にあるページ切替
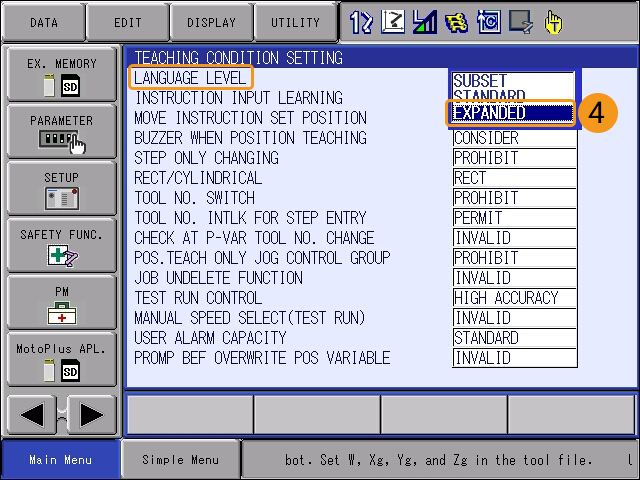
 ボタンをクリックし、を選択します。LANGUAGE LEVELのドロップダウンメニューでEXPANDEDを選択します。
ボタンをクリックし、を選択します。LANGUAGE LEVELのドロップダウンメニューでEXPANDEDを選択します。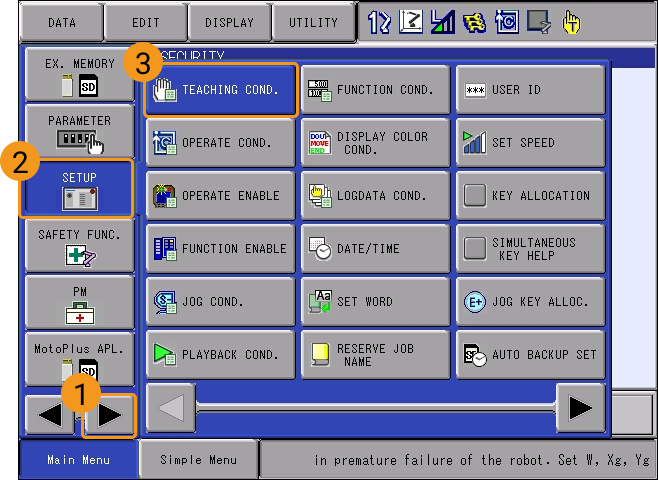
-
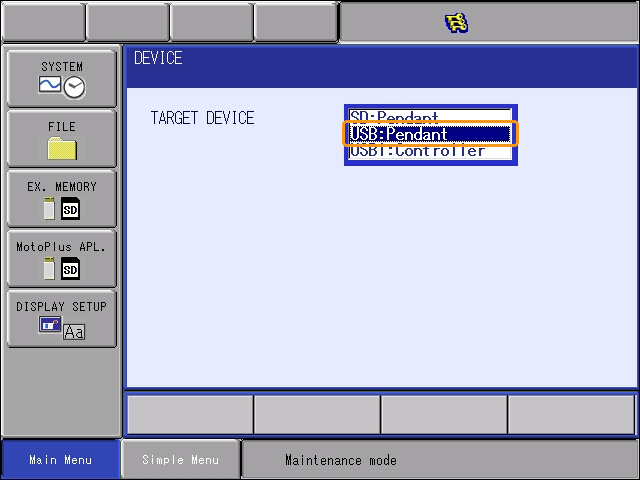
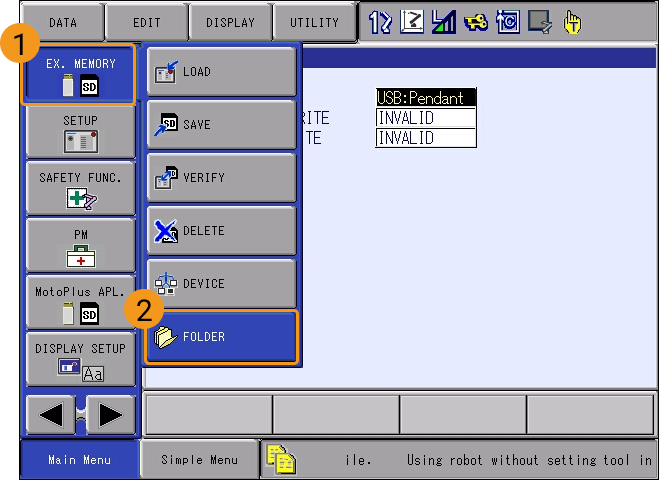
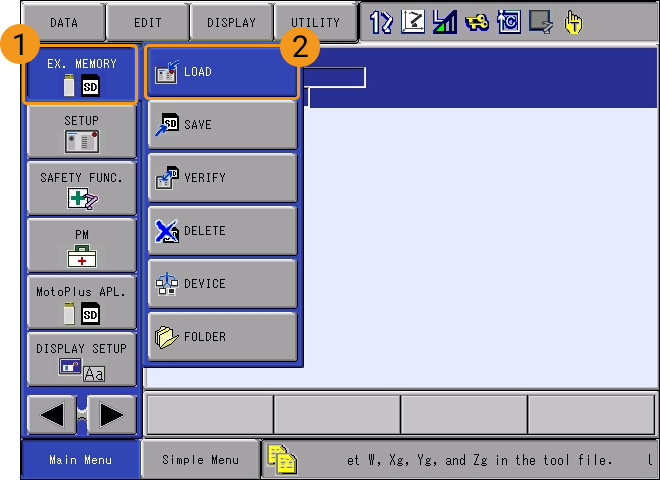
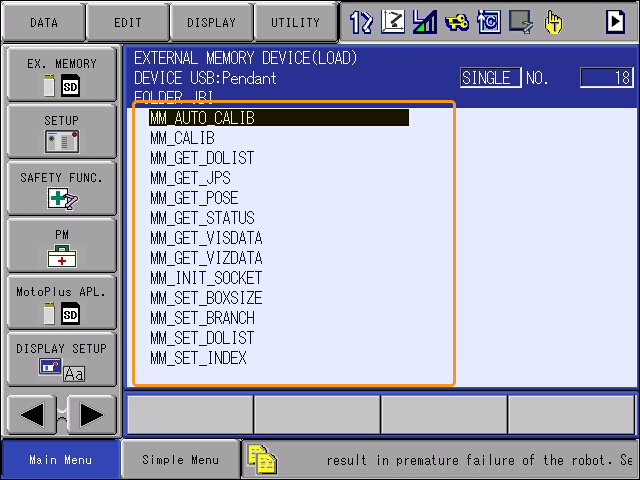
をクリックし、 USB:Pendent を選択します。

-
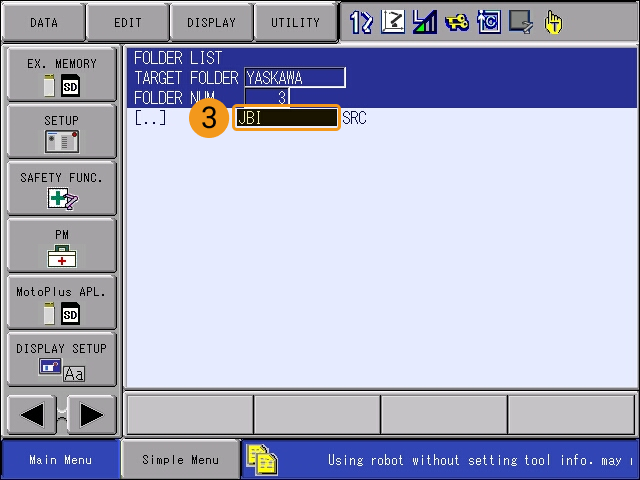
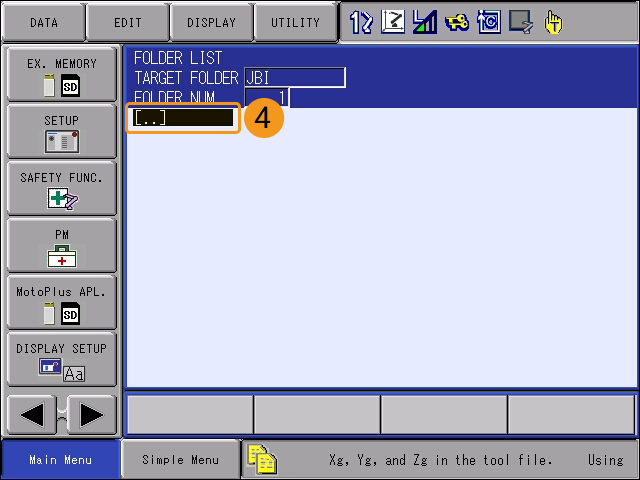
を選択します。ファイルリストから JBI を選択します。
-
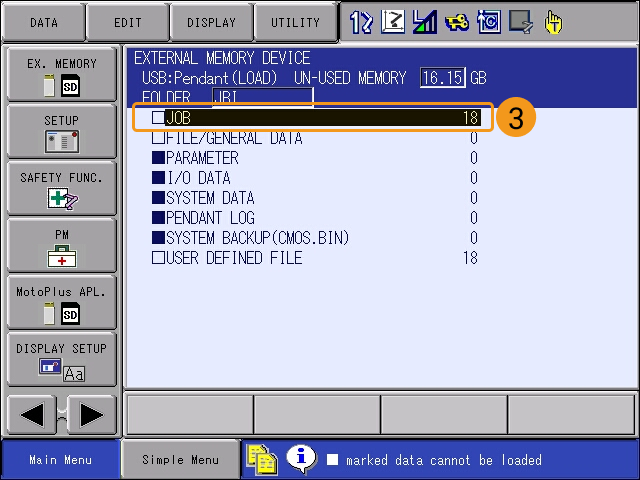
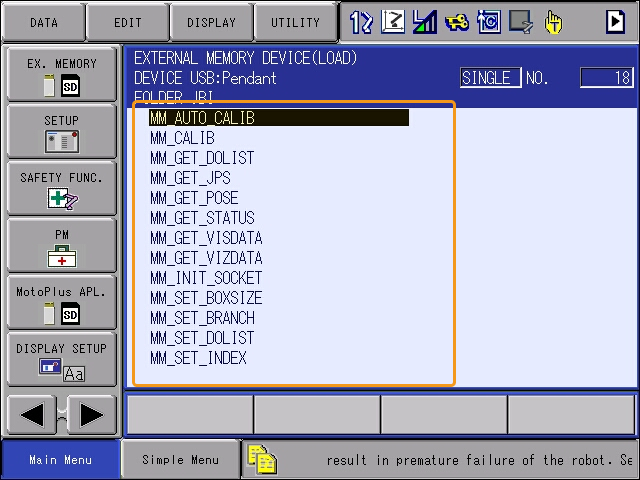
を選択し、JOBを選択します。インストールするプログラム一覧が画面に表示されます。
-
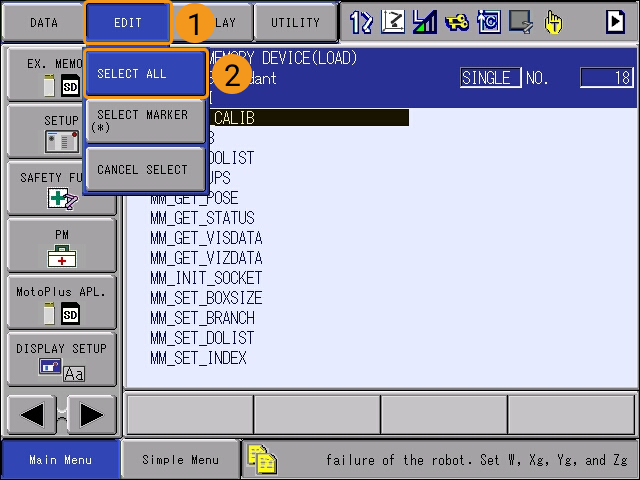
を選択し、すべてのプログラムを選択します。
-
ティーチペンダントの
ENTERキーを押し、ポップアップウィンドウでYESを選択してフォアグラウンドプログラムのインストールを開始します。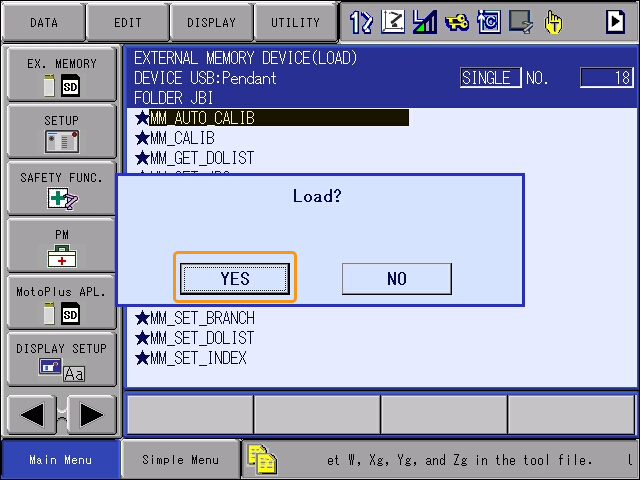
-
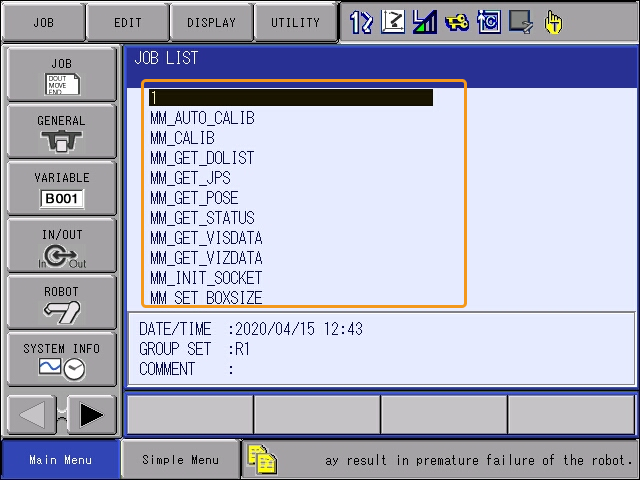
フォアグラウンドプログラムがインストールされた後、を選択します。インストールされたプログラムリストにすべてのフォアグラウンドプログラムが表示されていれば、フォアグラウンドプログラムは正常にインストールされています。
サンプルプログラムファイルの読み込み
フォアグラウンドプログラムファイルの読み込み と同じ手順で、サンプルプログラムファイルを読み込みます。
読み込むフォルダを選択するときは、SAMPLEフォルダを選択してください。
標準インターフェース通信をテスト
ロボットとビジョンシステム間の標準インターフェース通信をテストする場合、インターフェースサービスがオンになっていることを確認してから、ティーチペンダントでテストプログラムを実行し、標準インターフェース通信が有効であるかを確認します。読み込まれたキャリブレーションプログラム(MM_AUTO_CALIB)をテストプログラムとして直接使用することが可能です。
-
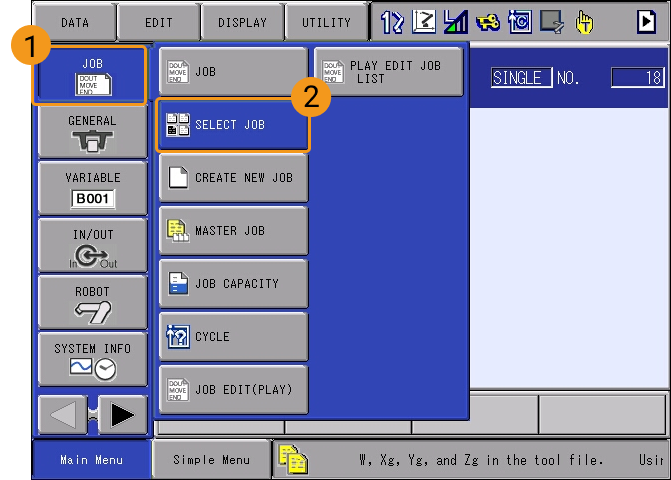
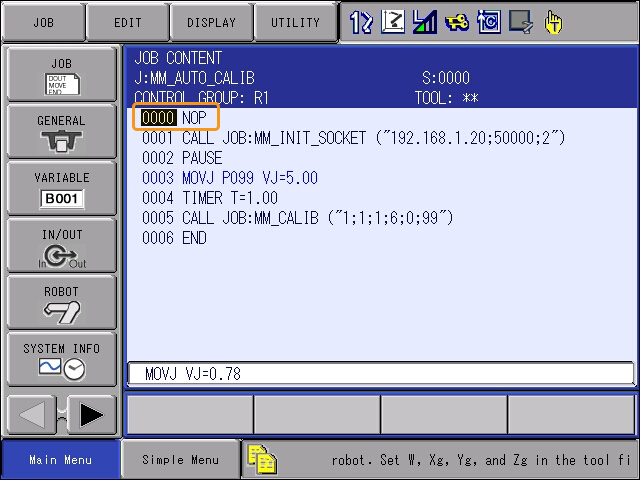
Main Menuからを選択し、インストールされたプログラムリストの画面に入ります。
-
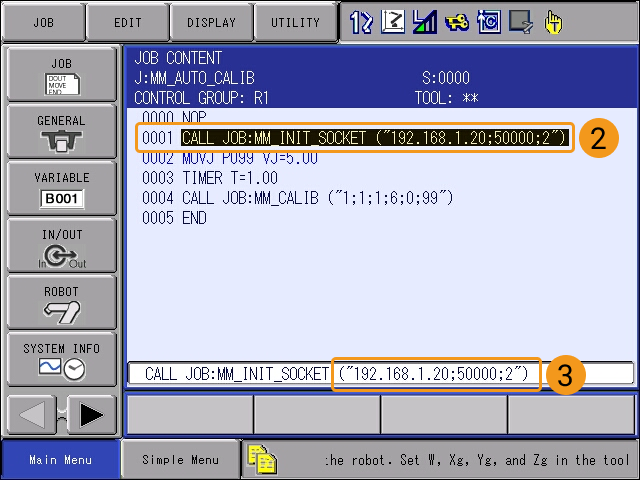
MM_AUTO_CALIBプログラムを選択し、
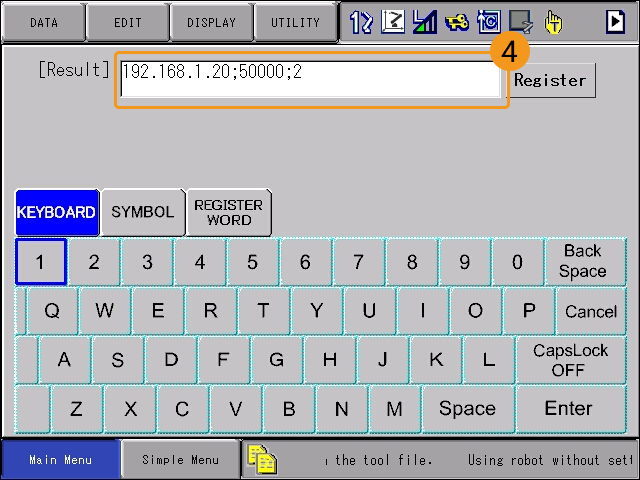
SELECTをキーを押して開きます。0001行目を選択して右下隅にあるボックスでIPアドレスおよびポート番号を選択します。次に、ENTERを押して変更画面に表示された後、IPアドレスをIPCのIPアドレスおよびポート番号に変更します。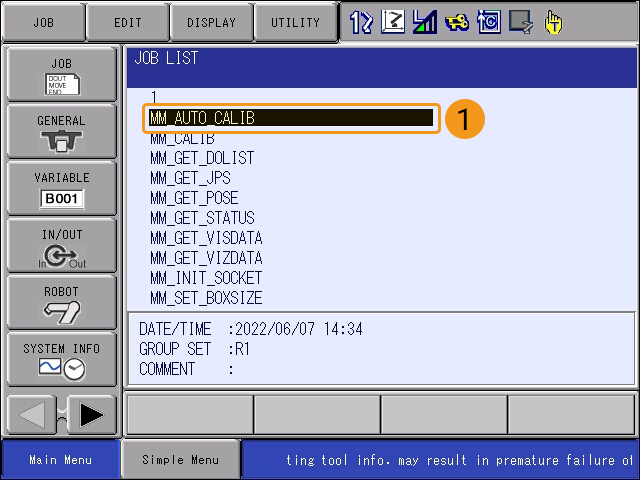
-
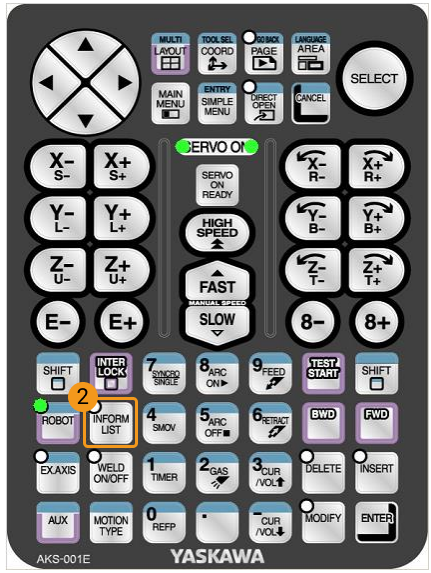
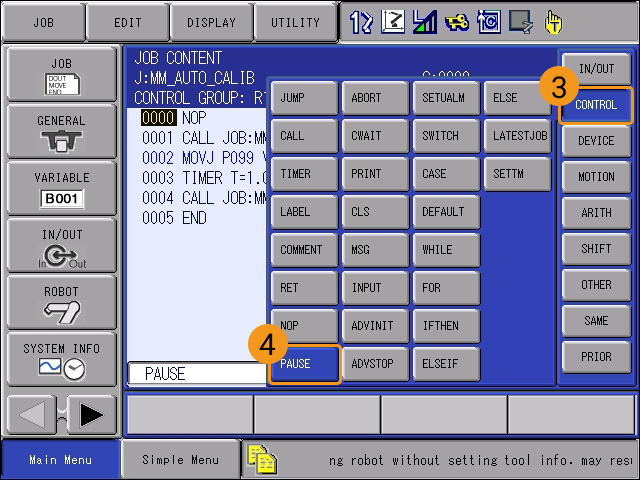
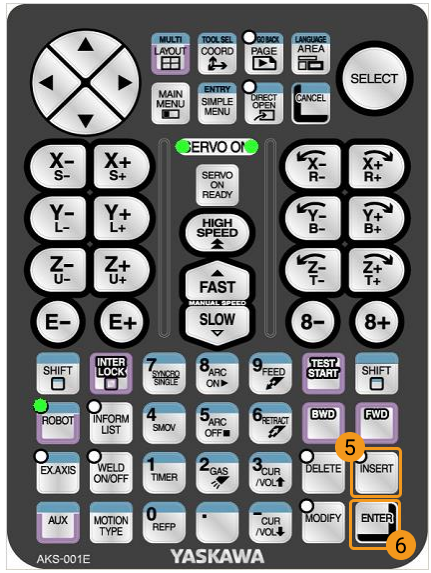
カーソルが0001行目に合わせ、ティーチペンダントの
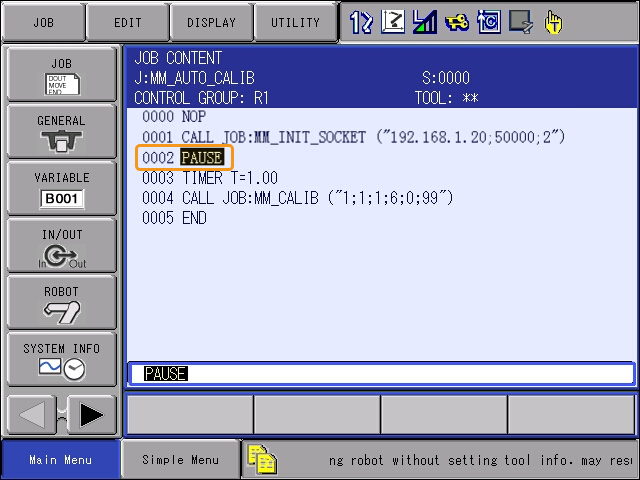
INFORM LISTキーを押し、右側のメニューからを選択し、INSERTを選択してENTERキーを押します。すると、0001行目の後にPAUSEコマンドが挿入されます。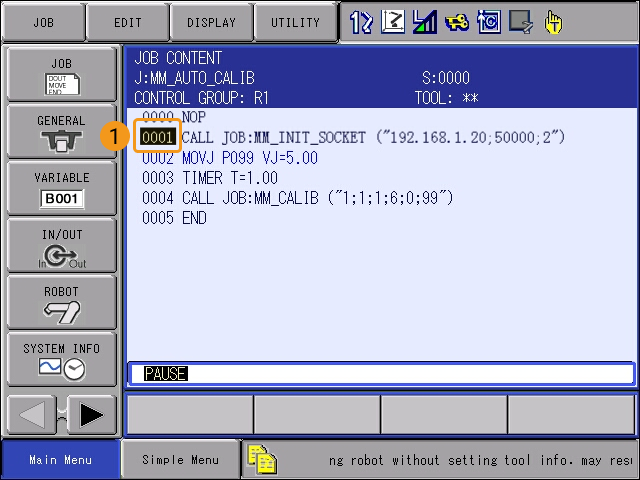
-
ティーチペンダントのキーを
TEACHに合わせるとティーチモードになります。 -
ティーチペンダントの
SERVO ON READYを押してから、背面のイネーブルスイッチを押しながらカーソルを最初の行(0000)に移動します。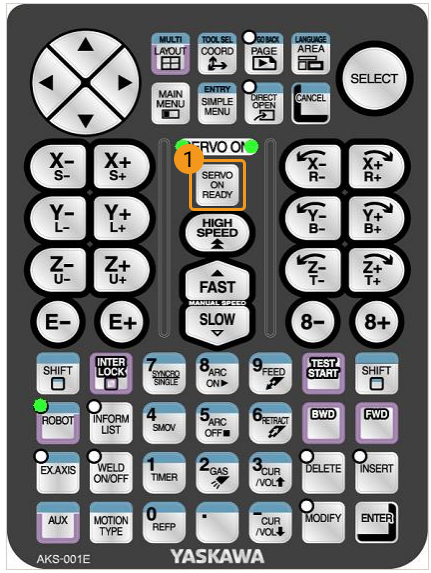

これは、プログラムが最初の行から実行されるようにすることです。
-
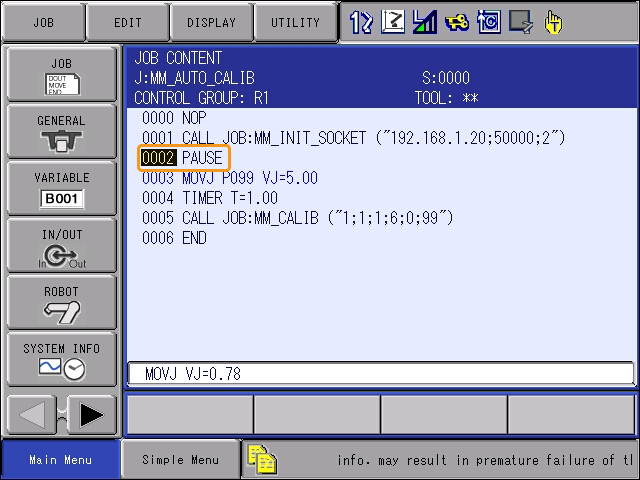
その後、ティーチペンダントの
INTER LOCKとTEST STARTを同時に押します。ロボットが0001行目の実行を終了すると、黒カーソルは自動的にPAUSE(一時停止)コマンドのある0002行目で停止します。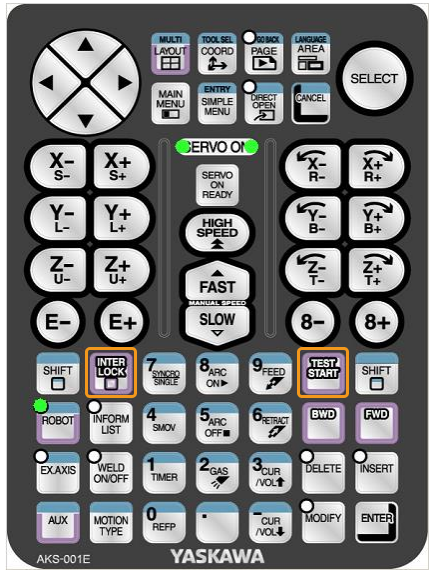
-
Mech-Visionでは、ログバーの「Console」タブに関連メッセージが表示されたかどうかを確認します。以下のログが表示された場合、Yaskawaロボットとビジョンシステムは標準インターフェースで正常に通信できるようになります。
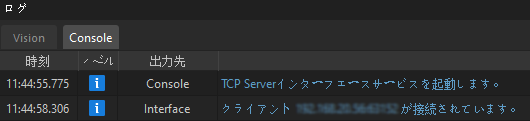
|