视觉续码¶
使用场景¶
已开始但未完成的垛型。
参数说明¶
- 移动任务基本参数
请查看 移动任务基本参数 。
- 指定垛型
选择可生成垛型的 预设垛型 、 自定义垛型 或 智能垛型 任务。
选择码垛任务后, 视觉续码 继承该任务的垛型及垛型中箱子的码放路径。
- 服务名称
选择合适的 视觉识别 任务。 视觉续码 通过视觉工程识别并定位托盘上的箱子。
视觉结果一般由两部分组成: 识别到的箱子位姿 与 识别到的托盘位姿 。
识别到的托盘位姿为非必须提供的数据。当视觉结果未提供识别到的托盘位姿时,将继承 指定垛型 中的托盘位姿。
提示
如托盘实际位置与设定值相差较大,推荐使用视觉工程识别到的托盘位姿,提高匹配准确率。
获得视觉结果后,识别到的箱子位姿与 指定垛型 中继承的箱的位姿将就近进行匹配。匹配时可以通过调节 视觉匹配 限制匹配结果。如匹配失败,工程走 匹配失败 出口;此时可在日志中查看匹配失败原因,然后调整。
视觉匹配
- 物体XY偏差阈值
指定垛型 继承到的箱子与视觉服务识别的箱子 XY 方向的最大偏差值。
- 物体Z向偏差阈值
指定垛型 继承到的箱子与视觉服务识别的箱子 Z 向的最大偏差值。
- 物体绕Z旋转阈值
指定垛型 继承到的箱子与视觉服务继承的箱子 绕 Z 轴旋转的最大偏差值。
- 匹配对称性
解决视觉服务给出的箱子位姿朝向与待匹配垛型(指定垛型中继承)箱子朝向不一致导致的匹配失败的情况。
自动:默认值,为 180° 对称加 90° 对称,可解决大部分情况。
无对称性:不进行对称。
180° 对称:XY 方向为长方形时使用。
90° 对称:XY 方向为正方形时使用。
位姿修正
- 位姿修正设置
视觉匹配 成功后,根据匹配后所有纸箱的平均偏差对垛型进行修正。
全修正:同时修正位移和转动
仅修正位移
仅修正转动
判定条件
- 物体标签
根据视觉工程给出的纸箱标签进行物体筛选,仅对特定标签物体进行 视觉匹配 。
如不设置物体标签,视觉工程识别到的全部纸箱均会参与垛型匹配。
- 检查已存在物体顺序
默认勾选,将检查续码工程中已码放箱子的顺序。
续码序号要求:序号不可间断,且序号 1 不为空。如符合要求,工程正常进行;如不符合要求,则报错。
举例说明:码垛一层有 10 个箱子,软件会自动计算抓取序号,如下图所示。不同情况说明如下:
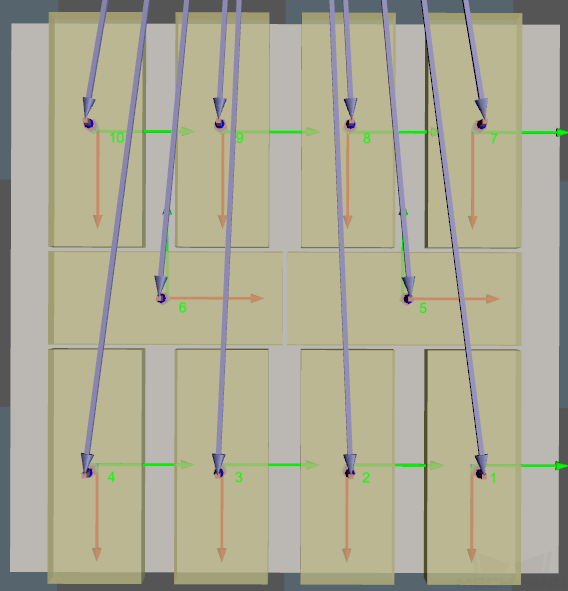
序号 1 未码放箱子,序号 2、3 已有箱子,软件报错;
序号 1、2、3、4、6 箱子已码放,序号 5 未码放,软件报错。
已码放箱子序号从 1 开始,未有间断,工程正常运行。