手动标定步骤¶
本章将介绍当机器人无法连接梅卡曼德视觉系统时的手动标定步骤。
小技巧
在进行手动标定前,您应收集如下机器人信息:
可动轴数:例如四轴机器人、五轴机器人、六轴机器人或其他。不同可动轴数机器人的标定步骤略微有些差异。
欧拉角类型:手动标定过程中需要指定机器人的欧拉角类型。
标定预配置¶
打开 Mech-Vision 软件,在工具栏上点击 相机标定(标准) 按钮。 标定预配置 窗口将弹出。
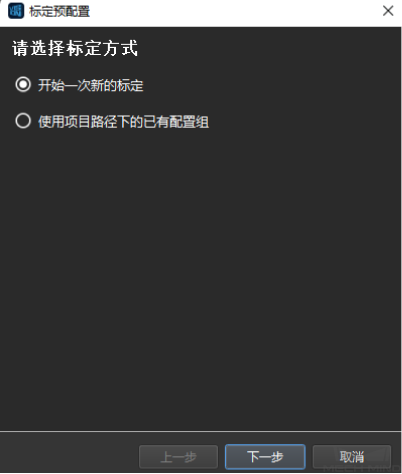
在 请选择标定方式 窗口,选择 开始一次新的标定 单选框,然后点击 下一步 按钮。
在 请选择标定安装方式 窗口,选择 Eye to Hand 或 Eye in Hand 单选框,然后点击 下一步 按钮。

在 请选择机器人标定类型 窗口,根据收集的机器人可动轴数选择 六轴机器人 、 四轴机器人 或 五轴或其他类型机器人 单选框,然后点击 下一步 按钮。

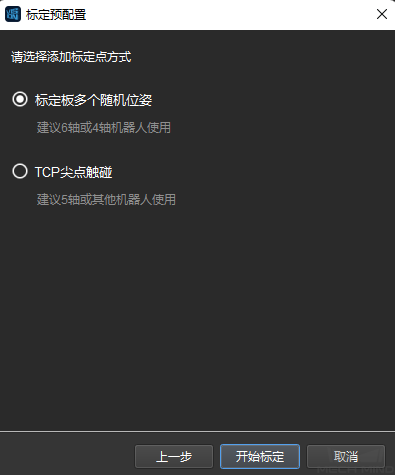
在 请选择添加标定点方式 窗口,选择 标定板多个随机位姿 或 TCP 尖点触碰 单选框,然后点击 开始标定 按钮。
至此,标定预配置已完成,将进入正式标定过程。
标定过程¶
与自动标定的步骤相比,手动标定过程仅在个别步骤存在差异。
自动标定步骤–采用多个随机标定板位姿方式的 ETH 标定场景¶
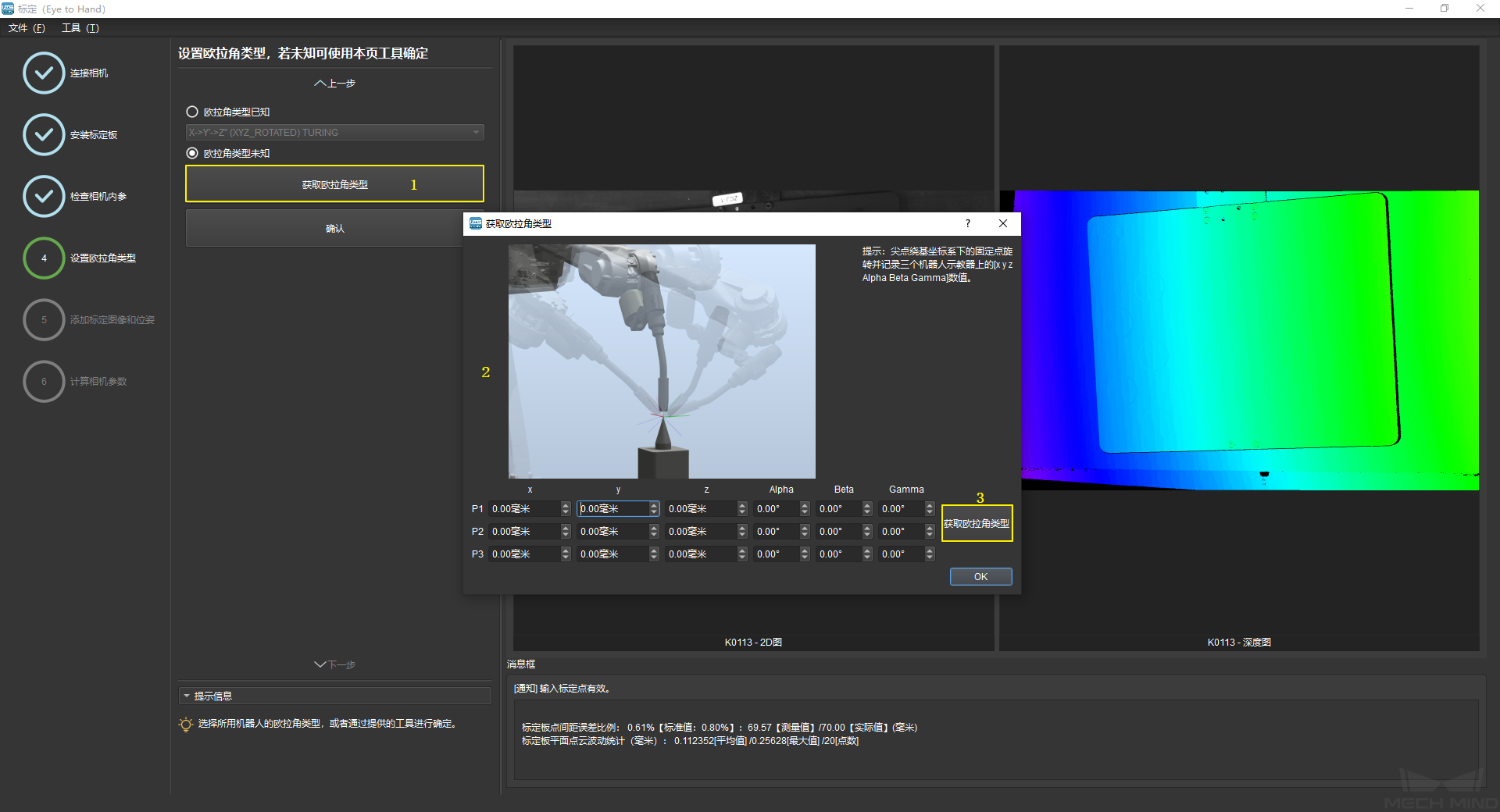
设置欧拉角类型¶
若欧拉角类型已知,可直接勾选 欧拉角类型已知 并在下拉菜单中选择相应的欧拉角类型。
若欧拉角类型未知,如下图所示:
勾选 欧拉角类型未知 并点击 获取欧拉角类型 ;
在机器人工作区域内安装固定尖点,示教机器人绕此固定点旋转并在弹窗中分别记录三个差别较大的位姿;
点击 获取欧拉角类型 ,软件即可计算出当前机器人的欧拉角类型。
自动标定步骤–采用多个随机标定板位姿方式的 EIH 标定场景¶
(条件性)修改相机参数¶
请参考 (条件性)修改相机参数 。
自动标定步骤–采用 TCP 尖点触碰方式的 ETH 标定场景¶
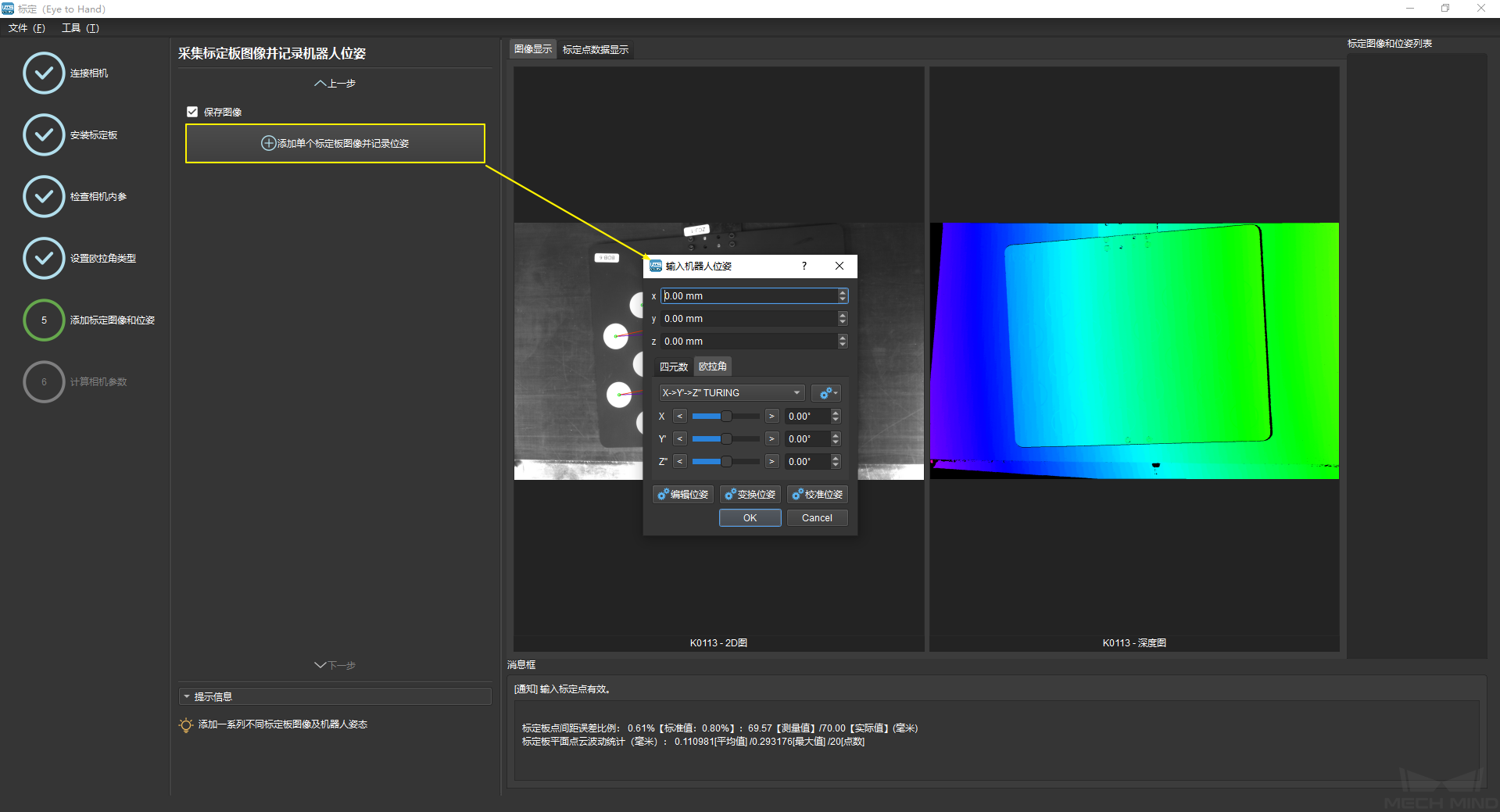
添加标定图像和位姿¶
使用示教器依次使机器人末端尖点触碰标定板上1、2、3三个点,每触碰一个点,点击一次 添加位姿 按钮,并在弹窗中输入机器人当前位姿,如下图所示。
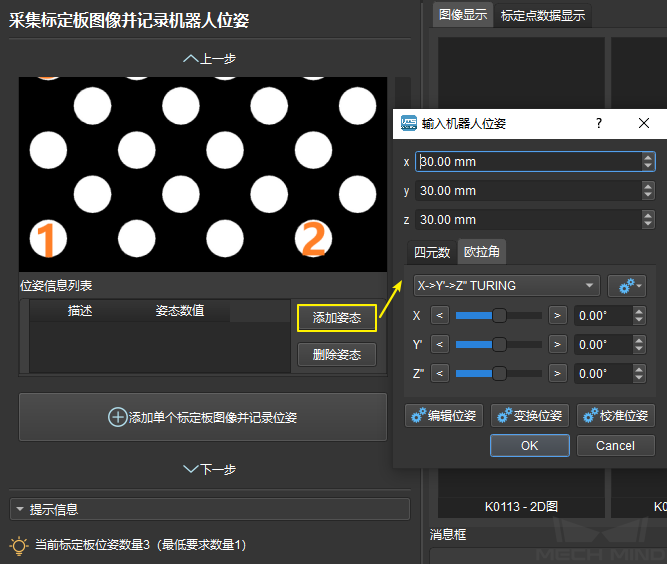
移动机器人,使相机能够完整拍摄到标定板,点击 添加单个标定板图像并记录位姿 按钮,相机拍照,识别出标定板圆点。使用EIH时,还需要在弹窗中输入机器人当前位姿。
随后点击 下一步 按钮,完成添加标定点位姿的步骤。
注意
在整个标定过程中,确保标定板固定不动。
(条件性)修改相机参数¶
请参考 (条件性)修改相机参数 。