标定前准备¶
在进行手眼标定前,您先需要完成如下准备工作:
完成整个系统的连通。
了解本章关于手眼标定的知识。
安装/放置相机标定板。
调整标定板点云成像。
完成整个系统的连通¶
在手眼标定前,您需要先连接梅卡曼德视觉系统的各个部分,并保证正常连通。
手眼标定需要使用 Mech-Eye Viewer 、Mech-Center 、 Mech-Vision 和 Mech-Viz 软件。 请确保上述软件已经安装并更新到最新版本。
此外,请参照 机器人通信配置 完成机器人的通信设置和连接,并在 Mech-Center 软件中确认机器人已连接。
了解本章关于手眼标定的知识¶
在手眼标定前,您应了解关于手眼标定的基本知识,包括定义、分类、方式和场景等。
安装/放置相机标定板¶
为了提升标定效率,在手眼标定前,您需要正确的安装或放置相机标定板。
检查当前使用的标定板为正常标定板:标定板上圆点清晰,没有明显刮花痕迹,标定板没有明显弯曲变形视为正常标定板。
正确安装或放置标定板。
在采用多个随机标定板位姿方式的 ETH 标定场景中,先将机器人专用的标定板连接件安装到机器人末端法兰上,再将标定板安装到连接件上。确保标定板安装稳固,标定板与机器人末端的 XY 平面平行。
注解
当机器人法兰装载不可拆卸夹具时,可将标定板直接固接在夹具上。
在其他场景中,将标定板平放在工作平面的中心位置。
注解
其他场景包括:
采用多个随机标定板位姿方式的 EIH 标定场景
采用 TCP 尖点触碰方式的 ETH 标定场景
采用 TCP 尖点触碰方式的 EIH 标定场景
标定板的安装和放置如下图所示(左图为安装,右图为放置):
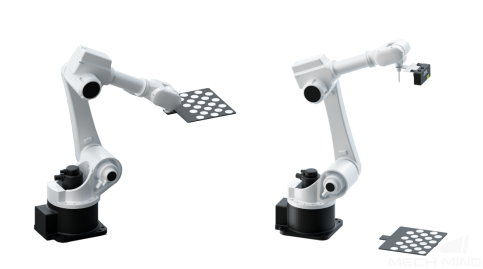
将机器人移动到起始标定位置。如下图所示,左侧为标定板安装方式,右侧为标定板放置方式。
标定板安装方式下,机器人起始标定位置为视野最下方中间位置(机器人带动标定板由下往上层层标定);
标定板放置方式下,起始位置为相机工作位置(机器人带动相机由下往上层层标定)。

调整标定板点云成像¶
打开 Mech-Eye Viewer 软件,调整相机参数。
调整 2D 参数 ,使 2D 图中标定板清晰,没有过曝和过暗现象。
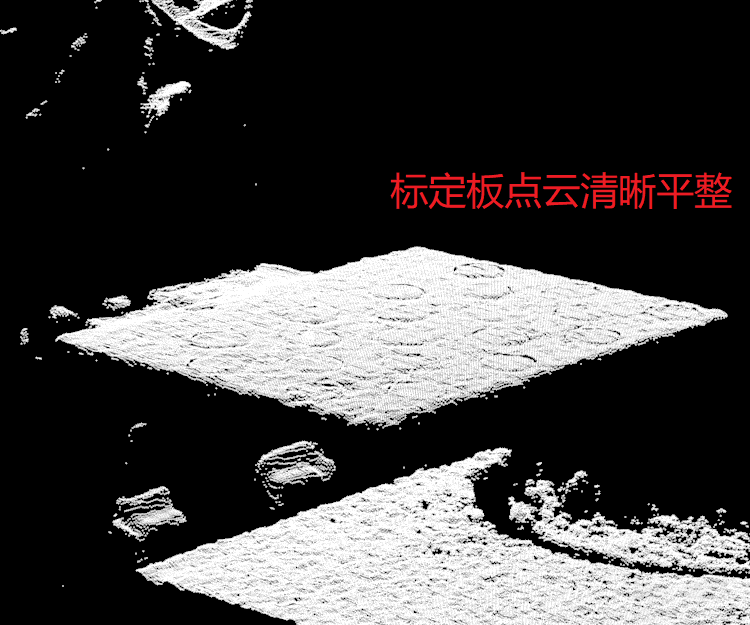
调整 3D 参数 ,使标定板上圆点点云饱满完整,建议将 点云后处理 中的 点云平滑 和 噪点去除 改为 Normal,降低点云波动范围。
注解
若现场环境光较复杂,建议通过遮补光来降低环境光对 2D 图和点云的影响。
通过完成以上步骤来确保标定板上的圆点点云完整,轮廓清晰,如下图所示。