标定结果检查与分析¶
对于标定完成的外参数据,需要对其检查,并判断标定精度是否满足要求;如果误差超出正常范围,需要定位造成误差的原因,解决问题后,再重新标定,直至获得符合要求的外参。
标定结果查看¶
在计算相机参数页面下,标定结果计算完成后,会显示误差点云。如下图1所示。误差点云用于显示每个标定位姿上标定板圆点真实值与计算值之间的偏差。
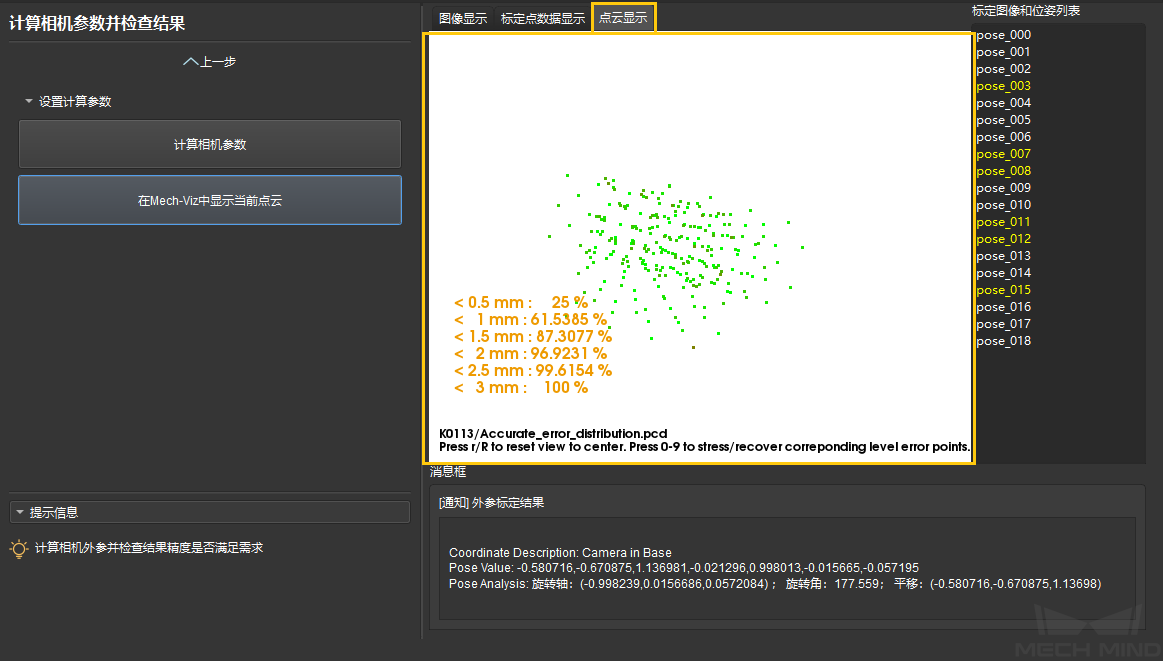
图1 显示误差点云¶
误差点云的颜色表征对应点的误差等级(每0.5mm一个误差等级),由绿到红颜色越深表示该点的误差越大。
点击显示框,在英文输入法状态下,按下数字键0-9,会高亮点云中相应误差等级的点(按键0对应误差小于0.5mm的点,按键1对应误差在0.5mm至1mm之间的点,依此类推)。 图2中高亮的点为误差小于0.5mm的数据点(按下数字键0):
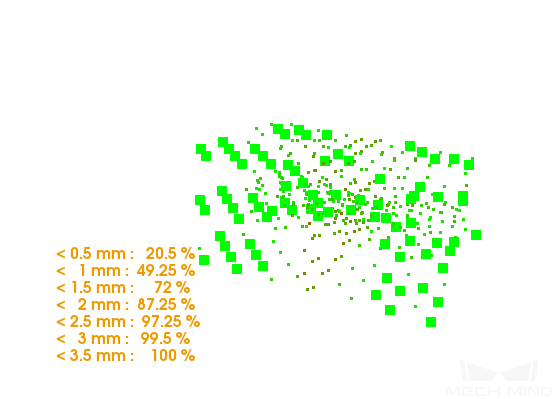
图2 误差点云说明¶
图3中高亮的点为误差在2.0-2.5mm的数据点(按下数字键4):
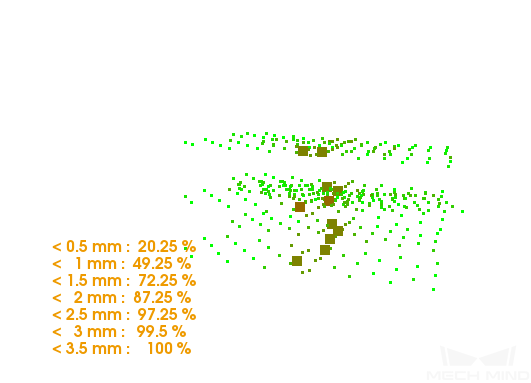
图3 误差点云说明¶
显示误差点云后,在Mech-Vision中的 日志 窗口会同步显示计算误差结果,如下图4所示:
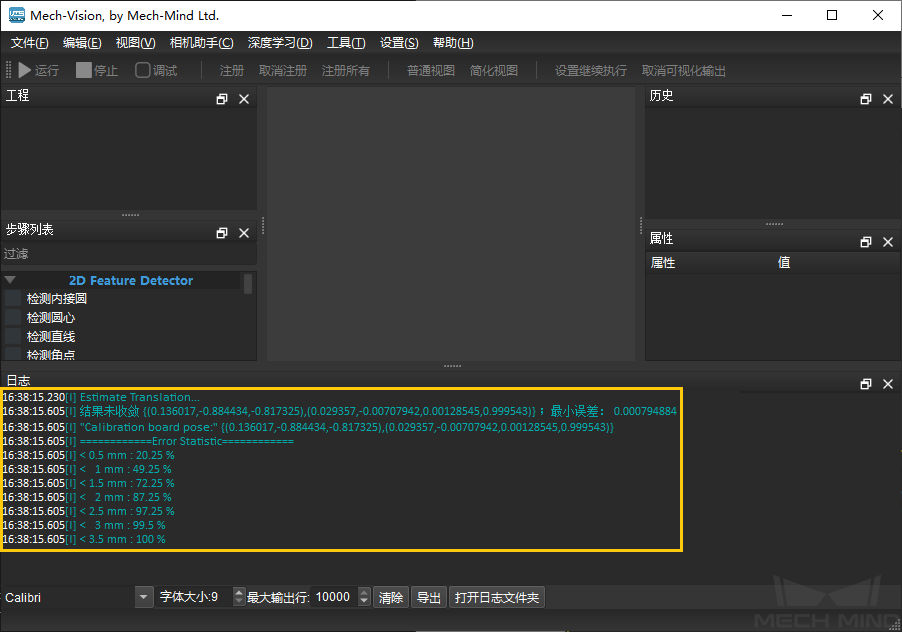
图4 误差显示¶
也可以通过观察Mech-Viz中的点云图像粗略查看标定结果,具体如下:
使用ETH方式得到外参计算结果后,将机器人移动到相机视野下方,点击 在Mech-Viz中显示当前点云,通过Mech-Viz软件查看拍摄的机器人点云。理想状态下,机器人的点云应当与机器人模型大致重合。 (注意Mech-Viz中的机器人模型与真实机器人外观不能完全吻合,不能作为微调外参的依据) 如下图5所示。

图5 机器人点云与机器人模型重合度¶
使用EIH方式可以将标定板放置在固定位置,令机器人多次变换相机位姿对标定板拍照,观察标定板点云相对机器人基坐标是否有明显偏移。如下图6所示。
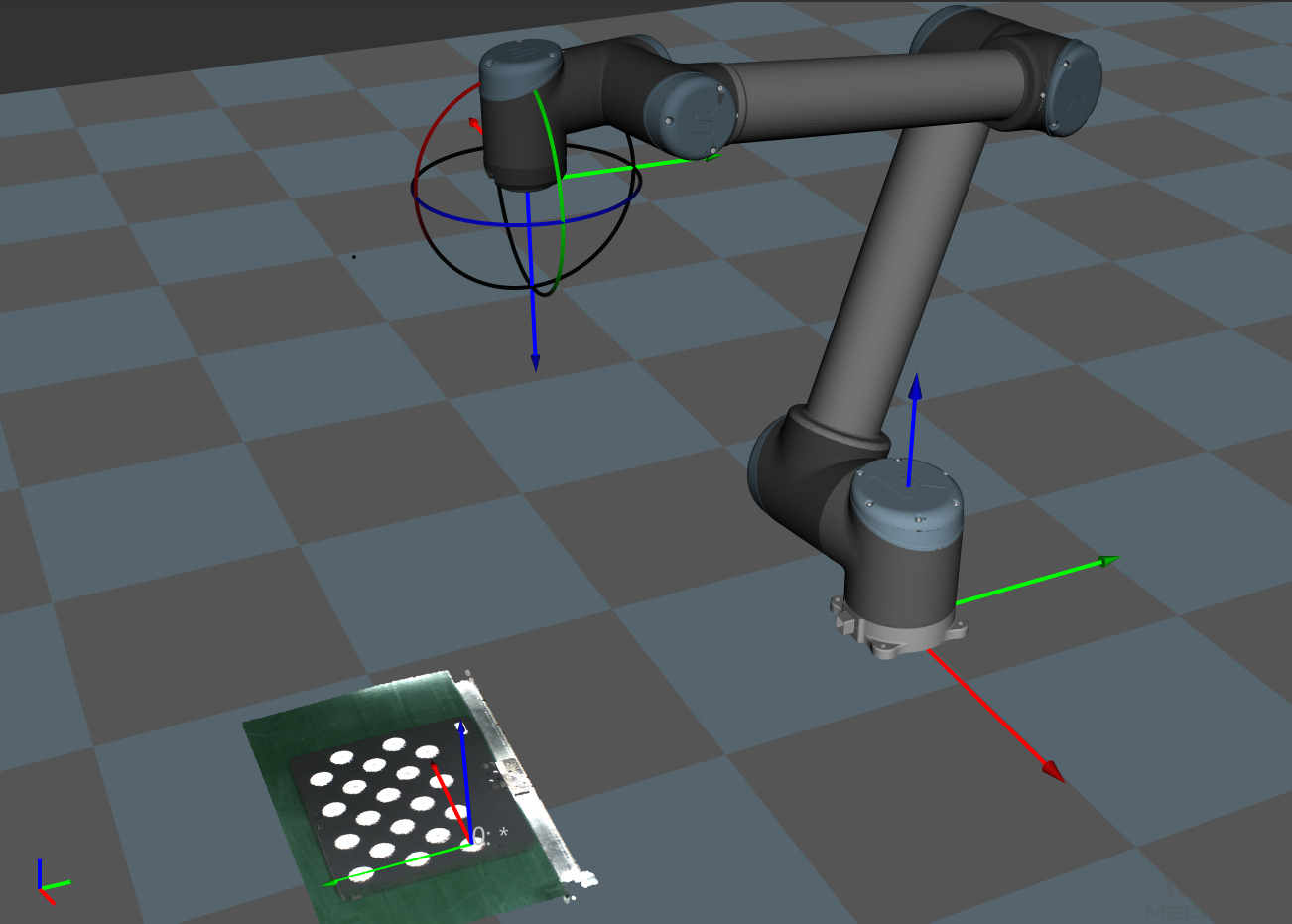
图6 标定板点云¶
注意
EIH在未连接机器人的状态下不能实时获取机器人位姿,需要填写机器人当前拍照点位姿才能准确查看在Mech-Viz中显示的点云。粗略查看不可作为纠正误差的依据。
标定结果分析¶
标定结果评价指标
对于标定好的外参数据,需要对其进行判断是否满足精度要求。点云误差参考标准如下:
一般工程场景,要求所有数据点误差小于3mm,即<3mm时达到100%。
高精度场景,要求所有数据点误差小于2mm,即<2mm时达到100%。
码垛场景,要求所有数据点误差小于5mm,即<5mm时达到100%。
上述标准仅供参考,具体要求以实际生产中的工程精度要求为准。
影响标定精度的因素
对于标定好的外参数据,如果精度没有达到要求,需要寻找产生误差的原因,请按如下顺序逐一排查标定数据,检查造成问题的原因。
检查标定数据有无问题¶
标定数据指标定时产生的标定点数据,其存放在相机编号文件夹下的calib_data.json文件中, 该文件记录了标定点的法兰位姿,角点识别数据等。当加载相机标定数据时勾选 使用虚拟相机加载标定数据 ,会自动读取该文件并加载标定点数据。
对该数据的检查主要通过如下三个方面:
检查走金字塔路径的标定点(注意只是走金字塔的标定点,不包括旋转的标定点),其法兰位姿中欧拉角前后是否发生变化
点击 标定图像和位姿列表 中的标定点,选择 标定点数据显示 ,即可查看当前标定点的法兰位姿,如下图7所示 :
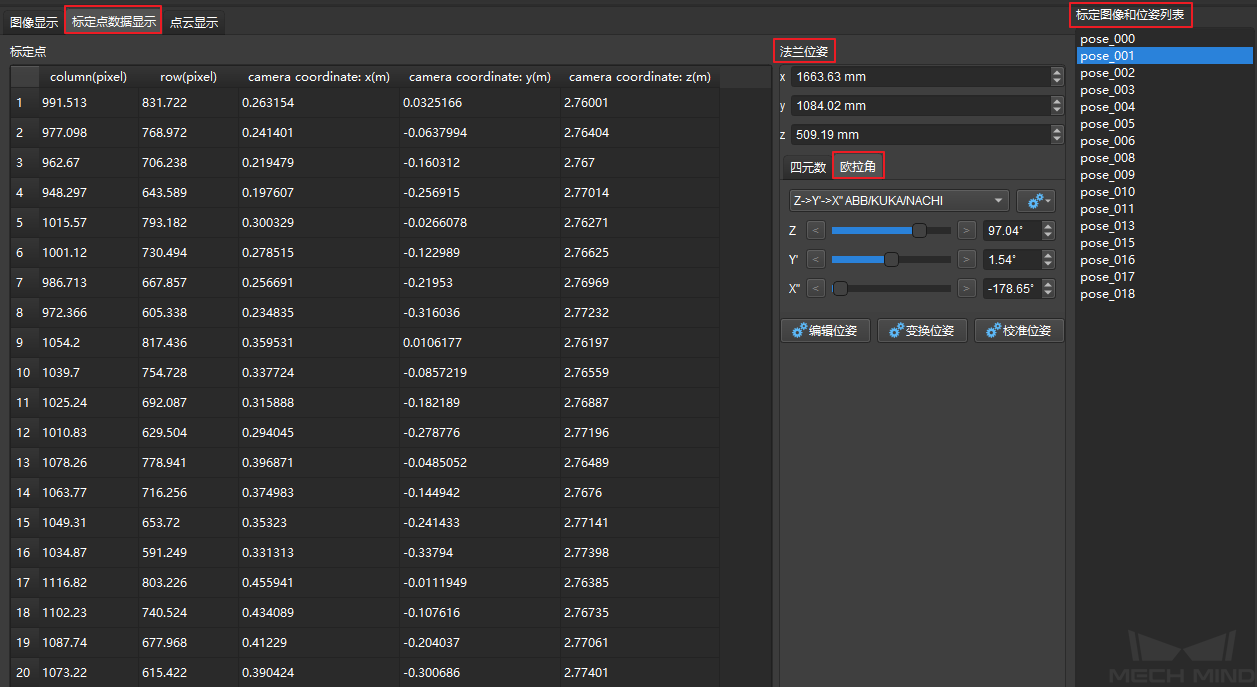
图7 标定点法兰位姿¶
注解
在图7中,column(pixel)和row(pixel)代表当前标定点2D图中标定板所有圆点圆心的像素坐标;camera_coordinate:x(m)/y(m)/z(m)代表当前标定点深度图中标定板所有圆点圆心在相机坐标系下的坐标。
走金字塔路径时,机器人会沿着自身基坐标Base或法兰Flange移动,不存在旋转,欧拉角会基本保持一致, 对于不同机器人,根据其精度不同,值存在上下浮动,如果浮动超过1度以上,则机器人本身零点可能丢失,或者机器人精度较差。
解决办法:此时不适合手眼标定,应当检查机器人零点(可以使用重定位的方法检验机器人零点是否准确)并修复机器人问题才能继续标定。
检查标定点“标定板点间距误差比例”是否超出标准值
选中标定点,在下方消息框中显示 标定板点间距误差比例 ,当其超出标准值后,标定点会变成黄色警告。 标定板点间距误差比例 作为内参检查结果的一部分,可部分反映当前相机内参的误差值。
解决办法:对于精度要求不高的场合,轻微超出标准值的内参仍旧可以用,但对于高精度或内参超差较大的情况,建议重标相机内参(标定内参最好使用大号棋盘格标定板)或返厂替换相机。
注解
内参的误差会影响标定结果,一般内参误差在标准值内时,基本没有问题。
检查标定点“标定板平面点云波动统计”的最大值是否超出3mm
标定板平面点云波动统计 代表单个标定点上标定板所有圆点圆心坐标拟合在一个平面上的上下波动,其值的大小会直接影响外参的精度。 精度要求越高,要求其值越小,一般设定最大值不超过3mm,当超过三个标定点大于3mm时,整体精度将不好保证,应当排除问题再次标定。 造成问题的影响因素分为两部分。
一是相机3D曝光没有调好,点云波动比较大, 点云平滑 和 点云去噪 没有开启,或者开了相机增益。
解决办法:开启点云平滑和点云去噪,关闭相机增益,调整3D曝光,如果标定板上圆点点云仍旧残缺,需要现场遮光处理。
二是出现在ETH自动标定方式下,标定板在机器人法兰末端固定不牢固,标定时机器人移动速度过快,导致相机拍照时标定板存在抖动,使得点云波动很大。
解决办法:调低机器人移动速度,加固标定板,延长相机拍照等待时间。
检查内参中 标定板点间距误差比例 和 标定板平面点云波动统计 如下图8所示:
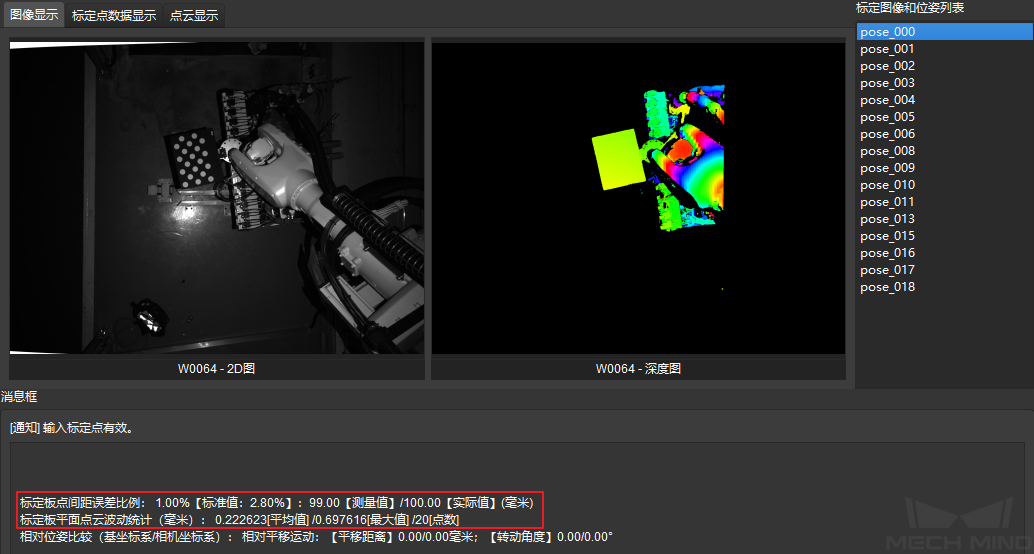
图8 检查内参和点云波动¶
重新计算补偿参数¶
补偿参数指的是针对标定区域进行区块划分计算的参数值,一般在相机出厂时会根据相机实际最大工作范围标出该参数值。
注解
由于实际现场标定条件与相机出厂时标补偿参数时存在不一致,故可能存在出厂补偿参数不适用的现象。
按上述顺序逐一排查标定数据并确认没有问题,但结果仍旧不理想,点击 设置计算参数 下拉菜单,勾选 重新计算补偿参数 选项,重新计算相机参数,如下图9所示。
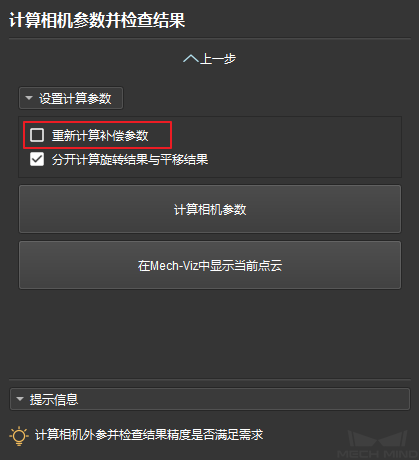
图9 计算补偿参数¶
注意
在勾选 重新计算补偿参数 选项重新计算之前请将原来的extri_param.json外参文件备份,并备注为出厂补偿参数。
按照上述方法排查问题,解决问题后重新进行外参标定,直至达到工程要求的精度时,外参标定完成。
注解
外参标定结束后请将相机参数改为实际工作状态。