标定类型、方式、场景¶
本章主要介绍手眼标定的类型、方式和场景。
标定类型¶
按照相机的安装方式,手眼标定可以划分为:
ETH(Eye To Hand)标定 :该类型用于标定相机光心和机器人基坐标之间的位姿关系。
EIH(Eye In Hand)标定 :该类型用于标定相机光心和机器人末端法兰中心之间的位姿关系。
注意
对于 ETH 标定类型,如果机器人基坐标或者相机发生移动,对应的外参就会相应发生变化,此时需要重新标定。
对于 EIH 标定类型,如果相机相对于机器人末端法兰中心坐标发生移动,对应的外参就会相应发生变化,此时需要重新标定。
按照机器人是否受视觉系统控制,手眼标定可以划分为:
自动标定(推荐) :机器人连接到视觉系统,视觉系统控制机器人按照规划的轨迹自动移动并自动拍照采集特征点。
手动标定 :机器人不能连接到视觉系统,需要通过示教器手动移动机器人进行拍照采集特征点并手动输入机器人位姿。
标定方式¶
标定方式是指为手眼标定添加标定点的方式。本软件提供两种标定方式:
多个随机标定板位姿(推荐)
使用软件自动生成的路径点(包括用于标定平移量的路径与用于标定旋转量的路径)或手动添加的多个位姿,在每个路径的路径点拍照并识别标定板角点,最终形成标定点列,建立标定板、相机及机器人三者间的关系。该方式过程简单,标定精度高。 建议6轴或4轴机器人使用该方式。
TCP 尖点触碰
利用三点法确定标定板位姿后,建立标定板、相机及机器人三者间的关系。该方式适用于机器人活动空间局促、标定板无法安装等情况。 建议5轴或其他机器人使用该方式。
小技巧
在实际应用场景中,请根据相机安装方式、机器人类型、机器人活动空间确定标定方式。
标定场景¶
本节介绍标定场景及其原理。
采用多个随机标定板位姿方式的 ETH 标定场景¶

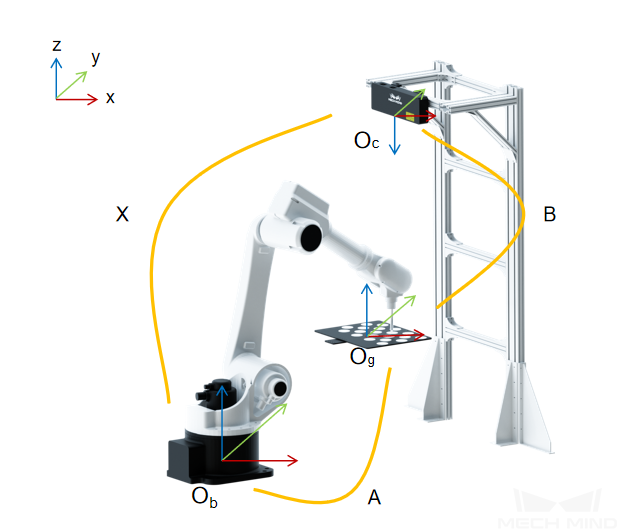
图1 标定板位置(采用多个随机标定板位姿方式的 ETH 标定场景)¶
机器人末端通过法兰连接已知尺寸的标定板,可以得到标定板上的每个标志点相对于机器人基坐标(Base)的坐标 A; 通过相机拍照获得标定板上每个圆点的图像,可以得到相机光心相对于标定板上每个标志点的坐标B;相机光心和机器人基坐标之间的位姿关系X为待求量。 A、B 和 X 构成闭环,形成等式,可以在等式中求解未知数 X。 标定板到法兰末端位置关系 C 未知,通过标定板在标定过程中的一系列相对移动,使用数值方法计算得到标定板到法兰末端的位置关系,进而计算得到 A。 通过移动机器人,变换标定板相对于相机的位姿,可以得到多组等式,对这些等式的值进行拟合优化计算,最终得到最优的 X 值。 位姿关系如下图所示。
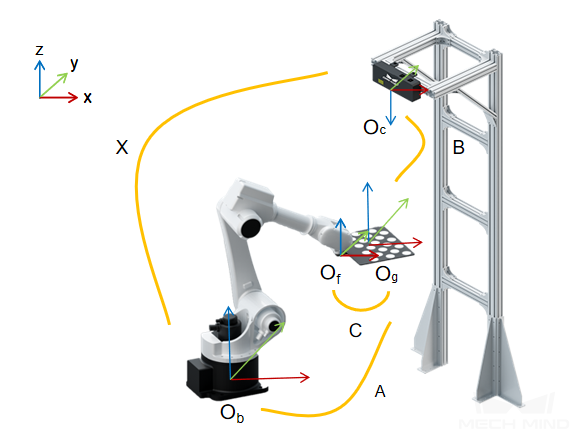
图2 采用多个随机标定板位姿方式的 ETH 标定场景¶
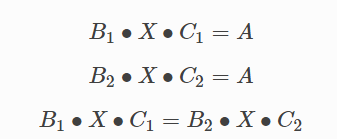
图3 相机坐标系与机器人坐标系对应关系计算公式¶
采用多个随机标定板位姿方式的 EIH 标定场景¶

图4 标定板位置(采用多个随机标定板位姿方式的 EIH 标定场景)¶
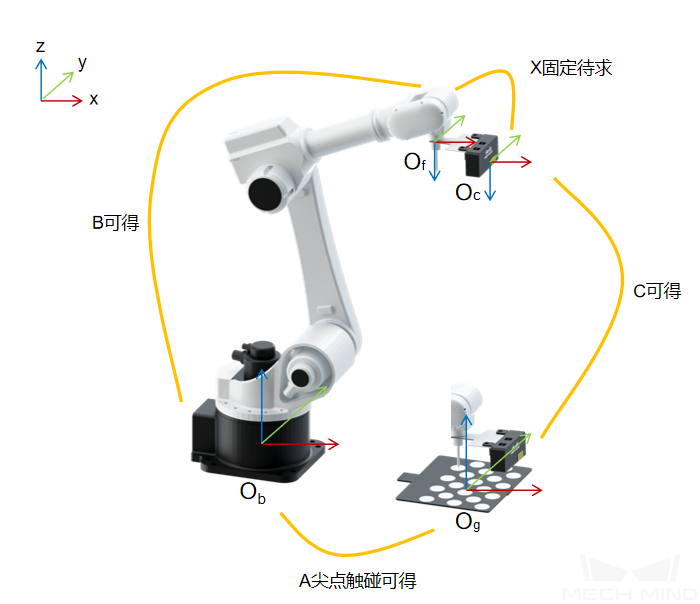
机器人末端通过固定架将相机固定,此时机器人末端法兰中心与相机光心之间的位姿相对固定, 即下图中的未知变量 X;机器人末端法兰中心相对于机器人基坐标系(Base)的位姿为已知量 B;相机通过对标定板进行拍照,获得相机光心和标定板上每个圆点之间的位姿关系,可得已知量 C;标定板平放在相机视野可达区域, 其相对于机器人基坐标之间的位姿关系为一固定值 A;这样变量 A、B、C、X 构成闭环关系。下列等式中,由于 A 为固定值,将前两个等式合并,得到的新等式中只有 X 为未知待求量。 变换机器人末端位姿进行不同角度拍照,得到多组 A、B、C 的值,利用这些数值进行拟合计算,得到最优的 X 的值。
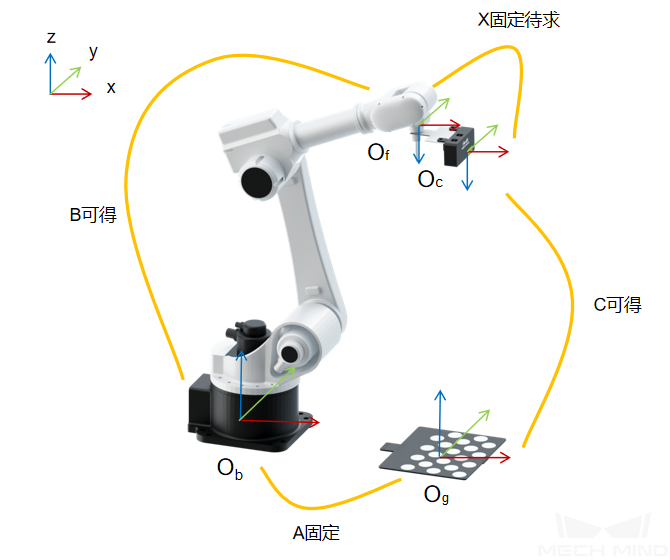
图5 采用多个随机标定板位姿方式的EIH标定场景¶
关于相机坐标系与机器人坐标系对应关系的计算公式,请参见上图3。