관절 각도 제한 조건¶
개념 소개
어깨: 손목 관절 중심과 Axis1의 상대적 위치 관계입니다. Axis1은 축1이 회전할 때 로봇의 중심 축입니다.
팔꿈치: 손목 관절과 LowerArm 의 상대적 위치 관계입니다. LowerArm 은 로봇의 축1과 축3이 회전할 때 중심의 연결선입니다.
손목: 손목 관절은 사실 로봇의 축5입니다. 축5 각도의 양/음의 관계는 손목이 뒤집히는 상태를 나타내고, Wrist center는 손목 관절의 중심을 가리킵니다.
값 리스트
자동: 이 로봇의 관절은 완전히 구속되지 않으며 최종 솔루션은 각 축의 최소 회전을 기반으로 하는 것이 가장 좋습니다.
유지: 로봇의 현재 상태는 로봇을 제한하기 위한 상태 A로 기록하며 Mech-Viz 프로젝트에서 다음 이동 태스크를 위해 솔루션을 선택할 때 상태 A와 일치한 솔루션을 선택합니다. 로봇의 축3을 예로들면 현재 로봇의 축3의 각도가 양이며 다음 이동 태스크를 위해 솔루션을 선택할 때 축3의 각도가 양인 솔루션만 선택할 수 있습니다.
이전: 손목 관절의 중심은 Axis1 앞에 있습니다.
이후: 손목 관절의 중심은 Axis1뒤에 있습니다.
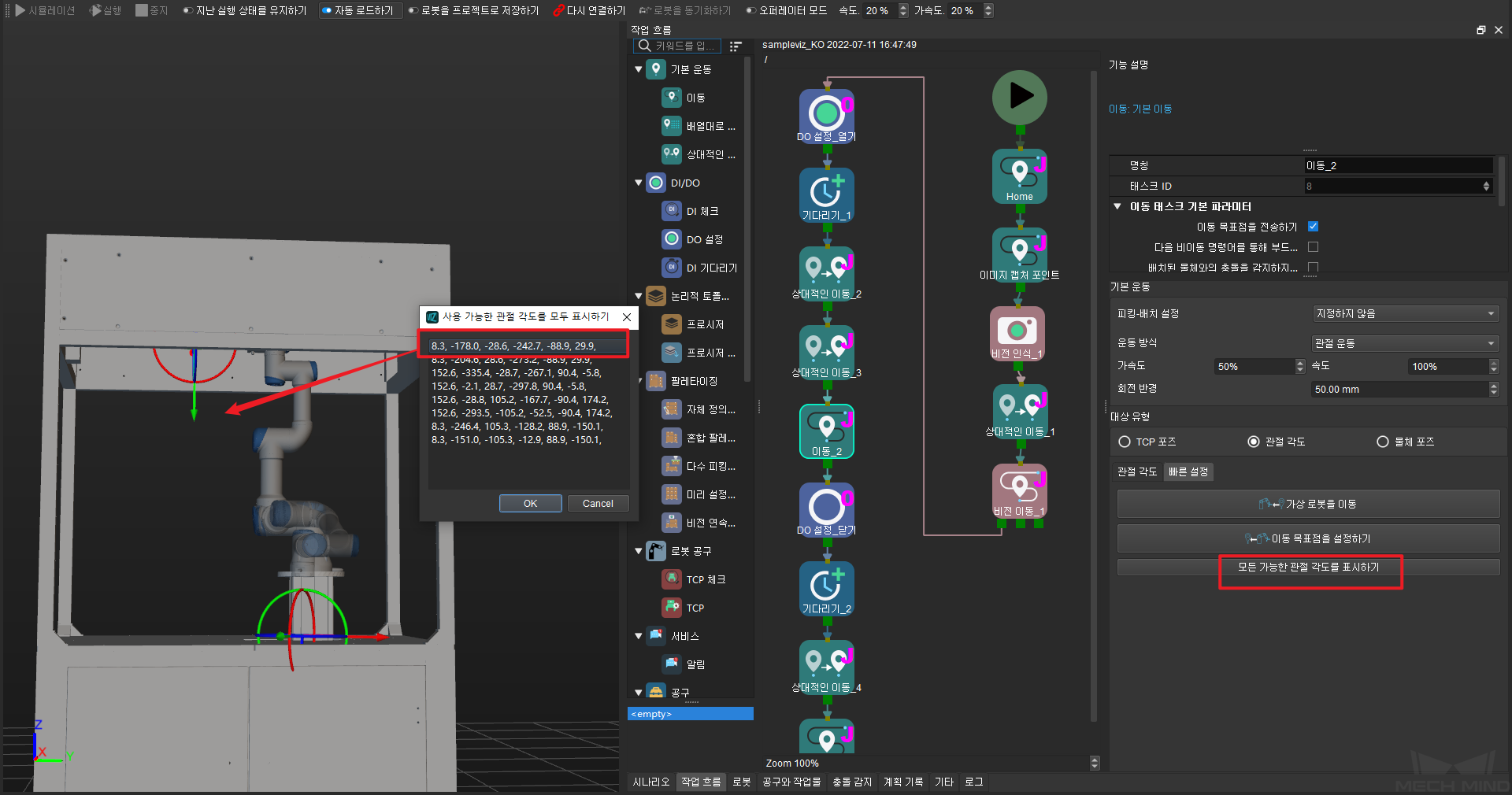
를 누르면 해당 포즈와 대응하는 모든 가능한 관절 각도를 표시할 것입니다. 그중의 포즈 하나를 클릭하면 3D 시뮬레이션 구역에서 로봇의 포즈를 볼 수 있어 다양한 제한 조건에서 선택할 수 있는 솔루션이 또 뭐가 있는지를 알 수 있습니다. 아래 그림과 같습니다.
더 많은 정보는 솔루션 시스템 내용을 참조하십시오.
주의
1.관절 각도 제한 조건 설정은 6축 로봇에서만 사용되며 4축 로봇은 어깨/팔꿈치/손목 회전 문제가 없다고 생각합니다. 2. [상대적인 이동], [미리 설정한 파렛트 패턴], [자체 정의한 파렛트 패턴] 태스크에서 이 파라미터를 설정할 수 없으며 기본적으로 로봇의 어깨, 팔꿈치 및 손목이 변경되지 않습니다. 즉, 이러한 태스크에서 로봇이 싱귤래리티를 지나치지 않도록 제한합니다.