移動目標点のタイプ¶
TCP位置姿勢:目標点は、TCP座標系のX、Y、Z値及びオイラー角または四元数の形で表されます。
関節角度:目標点はロボットの各関節の値で表されます。
物体の位置姿勢:目標点は物体座標系のX、Y、Z値及びオイラー角または四元数の形で表されます。
下図のように目標点のタイプを選択します。
ヒント
対応するボタンをクリックしてポップアップウィンドウで設定します。
TCP&物体位置姿勢のクイック調整:
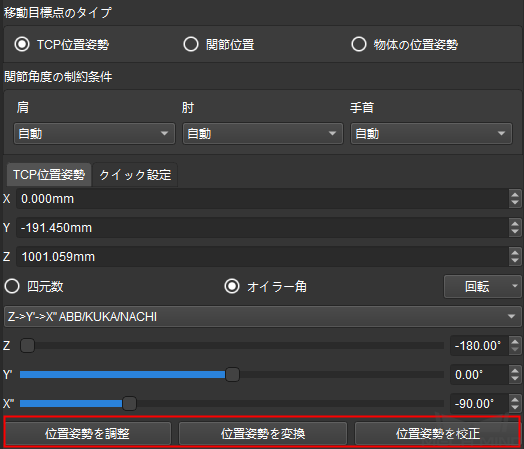
位置姿勢を調整: 位置姿勢を編集します。コピーと貼り付けができ、四元数とオイラー角の二つの形式に対応しています。
位置姿勢を変換: TCP位置姿勢をロボットベース座標系からTCP座標系に変換し、TCP座標系でTCPの位置姿勢を調整します。TCP座標系でロボット位置姿勢を調整するシーンに適しています。
位置姿勢を校正: ABBロボット三点法と類似しており、対象物の座標系を計算します。対象物の回転位置姿勢を確認できない場合に適しています。例えば、傾斜した直方体に対し、位置姿勢を校正することでその位置姿勢を計算し、ロボットが計算された位置姿勢に沿って動作させることができます。
関節角度のクイック設定
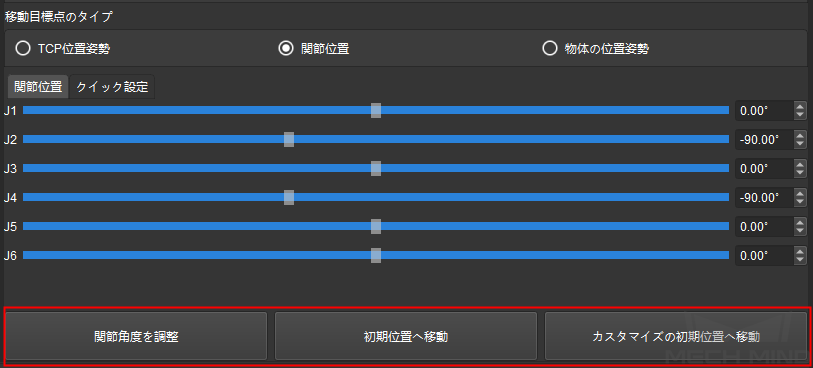
関節角度を調整: 位置姿勢を調整する方法と同じく、コピーと貼り付けができます。ラジアンと角度の二つの形に対応しています。
初期位置へ移動: 初期位置とは、ロボットの原点です。この機能を使用すれば、仮想ロボットを速やかに初期位置に戻すことができます。
カスタマイズの初期位置へ移動: カスタマイズの初期位置は、ユーザーが設定した初期位置です。 で設定します。仮想ロボットを速やかにカスタマイズの初期位置へ移動させる場合にこの機能を使用します。カスタマイズの初期位置を設定しなければ、それは初期位置と重なります。
クイック設定

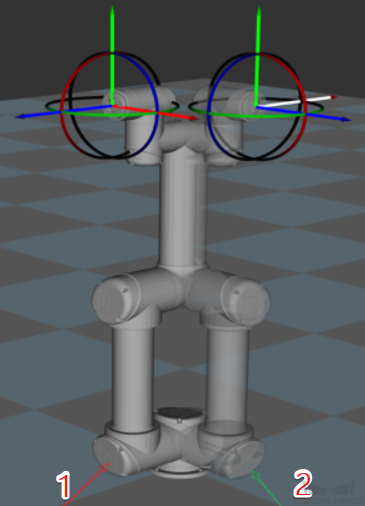
仮想ロボットを移動: 仮想ロボットをロボット目標位置に移動させます。つまり、ロボットモデルを位置1から位置2に移動させます。これは、仮想ロボットの位置を変更するだけです。
目標点を設定: 移動の目標点を仮想ロボットの位置に移動させます。つまり、目標点を位置1から位置2に移動させます。仮想ロボットの位置は変わらず、移動の目標点は変わります。
全ての可能関節角度を表示: 現在の移動目標点の全ての解を表示します。8まであります。ここで解の集合にある全ての解を表示し、現在の移動目標点が最適解です。