基本的な移動情報¶
基本的な移動情報は、移動タスクの主なパラメータであり、ロボットがこの目標点に到達する 速度 と 運動方式 を決定します。
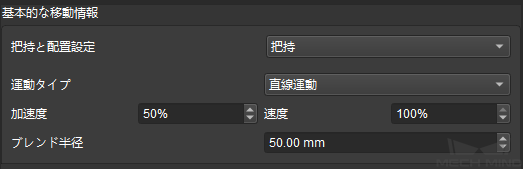
- 運動方式
- 関節運動:ロボットが円弧に沿って走行します。スムーズに走行できるので特異点を回避することが可能です。ロボットの移動範囲が広くて高い精度を求めないシーンに適します。直線運動:ロボットが直線に沿って走行します。溶接や接着剤塗布、把持など高い精度が求められるシーンに適しています。
- 速度&加速度
- 初期値:加速度は50%で、速度は100%です。調整説明:速度&加速度は、ロボット動作のスピードを決定します。普通、加速度の値を速度より小さく設定します。加速度の値を速度よりも大きくしたらロボット動作がスムーズでなくなります。
注意
ロボットが安定に把持するように、視覚処理による移動とその前後のタスクの速度を低く設定してください。
- ブレンド半径
- 初期値:50.00mm調整説明:通常、初期値を使用します。ブレンド半径とは、回転する位置が目標点までの距離であり、大きいほどロボットの動きはスムーズになります。ロボットが狭いスペースで動作する場合、ブレンド半径を大きく設定する必要はありません。ロボットがより広いスペースで動作し、障害物がなくて二つの経路の間に距離が遠い場合、ロボットがスムーズに動くように、ブレンド半径を大きく設定します。
- 把持と配置設定
- 初期値:未指定把持:視覚処理による移動の前の移動タスク。配置:視覚処理による移動の後の移動タスク。調整説明:Mech-Vizプロジェクトのロジック検査に使用されます。現場の実行手順に応じて、把持をしてから配置するという基本的な原則に従って設定します。