Basic Mechanism of ETH Calibration¶
When using the multiple random board pose method, a calibration board of known dimensions is installed on the robot flange, and the coordinates of each mark point on the calibration board, denoted by A, in the robot base coordinate system, can be obtained. By taking photos of the calibration board, the coordinates of the camera’s optical center relative to each mark point, denoted by B, can be obtained. The transformation relationship between the camera’s optical center and the robot base coordinates, denoted by X, is the unknown variable. Thus, A, B and X form a closed loop, and the value of X can be calculated through the equations generated from the loop. The spatial relationship between the calibration board and the robot flange, denoted by C, is unknown. Through movements of the calibration board during the calibration process, C can be obtained, which can be used to calculate A. Multiple poses of the calibration board can form a set of equations which give an optimal value of X by numerical fitting and optimization algorithm. This is shown in Figure 1 below.
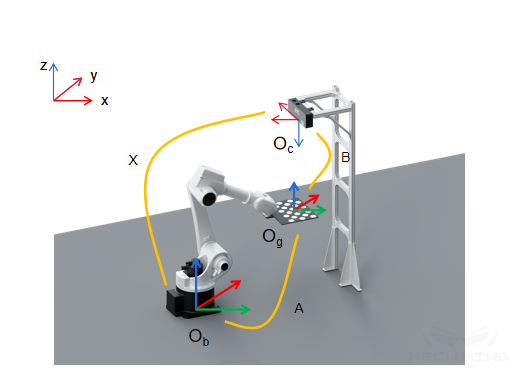
Figure 1. The multiple random board poses method (ETH)¶
When using the TCP touch method, place the calibration board on the object plane and install a sharp-tipped tool with known dimensions on the robot flange. Then, touch the mark points on the calibration board with the center point of the tool by moving the robot. As shown in Figure 2, the values of A and B are known, and the value of X can be obtained. When the calibration board is not fixed on the flange, the value of A can be calculated by touching the mark points on the calibration board using a sharp-tipped tool with known TCP coordinates.
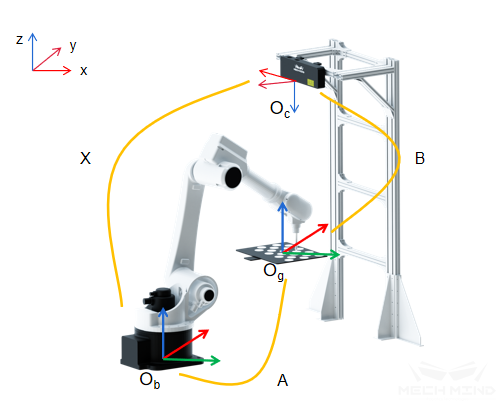
Figure 2. The TCP touch method (ETH)¶
Hint
Calibration under ETH calibrates the transformation relationship between the coordinate systems of the camera’s optical center and the robot base. If either the robot base or the camera moves, the extrinsic parameters would be altered, and the hand-eye relationship must be calibrated again.