말단장치 작업 수행
응용 시나리오
일반적으로 작업 모드가 적절한 말단장치로 자동 전환으로 설정된 말단장치를 바꾸기 스텝과 함께 사용되며 사용된 말단장치에 따라 대응한 작업을 수행할 수 있습니다.
파라미터 설명
통신 설정
데이터 전송 대상을 선택합니다. 솔루션이 마스터-컨트롤 통신 모드를 사용하는 경우 로봇에 전송 파라미터를 선택하세요. 솔루션이 Adapter 통신 모드를 사용하는 경우 Adapter에 전송 파라미터를 선택하세요.
말단장치 작업 구성
스텝 파라미터 바의 하단 영역에서 장치 작업 구성 버튼을 클릭하여 말단장치 작업 구성기를 엽니다.
-
왼쪽 일반적인 장치 리스트에서 작업을 구성할 말단장치를 선택하고 오른쪽 상단의 추가 버튼을 클릭합니다.
-
팝업창에서 말단장치 작업 이름을 입력하고 확인 버튼을 클릭하면 말단장치 작업을 새로 추가할 수 있습니다.
-
해당한 말단장치 작업 패널에서 + 버튼을 클릭하면 말단장치 작업에 DO 신호를 구성할 수 있습니다. 특정 DO 신호를 삭제하려면 해당한 줄을 선택하고 말단장치 작업 패널의 - 버튼을 클릭하면 됩니다.
-
특정 작업을 삭제하려면 해당한 말단장치 작업 패널에서
 버튼을 클릭하면 됩니다.
버튼을 클릭하면 됩니다. -
말단장치 작업 이름을 재설정하려면 해당한 말단장치 작업 패널에서
 버튼을 클릭하고 팝업된 창에서 새로운 말단장치 작업 이름을 입력합니다.
버튼을 클릭하고 팝업된 창에서 새로운 말단장치 작업 이름을 입력합니다.
|
말단장치 작업을 수행할 때 포트 리스트 순서에 따라 DO 신호를 전송합니다. 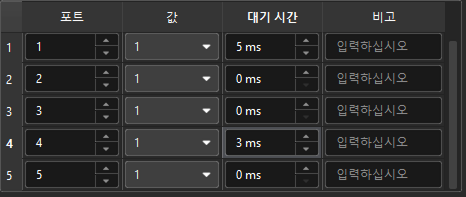
마스터 컨트롤 통신을 사용할 때, 특정 포트의 대기 시간이 0이 아니면 해당 포트의 DO 신호 전송이 완료된 후 소프트웨어는 지정된 시간만큼 대기한 후 다음 포트의 DO 신호를 전송합니다. 예를 들어, 위 그림에서 포트 1의 DO 값이 전송된 후, 소프트웨어는 5ms 동안 대기한 다음 포트 2와 포트 3의 DO 값을 순차적으로 전송합니다. 포트4의 DO 값이 전송된 후, 소프트웨어는 3ms 동안 대기한 다음 포트 5의 DO 값을 전송합니다. 표준 인터페이스 통신을 사용할 때, 대기 시간이 0인 경우 해당 포트의 DO 신호는 먼저 대기열에 들어가며, 리스트에서 이후 포트의 대기 시간이 0이 아니게 되면 그 이후의 DO 신호와 함께 전송됩니다. 예를 들어, 위 그림에서 포트 1의 DO 값이 전송된 후, 소프트웨어는 5ms 동안 대기합니다. 그런 다음, 포트 2, 3, 4의 DO 값이 함께 전송됩니다. 누적된 DO 값이 모두 전송된 후, 소프트웨어는 3ms 동안 대기합니다. |
