포인트 클라우드 클러스터링

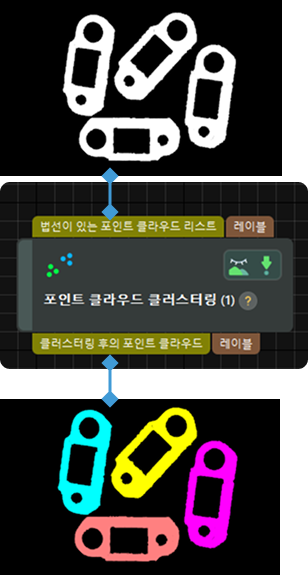
파라미터 설명
- 클러스터링 알고리즘
-
파라미터 설명: 이 파라미터로 클러스터링 방법을 선택할 수 있습니다.
값 리스트: EuclideanCluster, RegionGrowingSeg
-
EuclideanCluster: 유클리드 클러스터링으로 거리를 기준으로 포인트 클라우드가 동일한 클러스터에 속하는지 여부를 판단합니다.
-
RegionGrowingSeg: 영역 성장 분할로 법선 방향과 곡률에 따라 동일한 클러스터에 속하는지를 판단합니다.
기본값: EuclideanCluster
조정 설명: 기본값을 사용하는 것이 좋습니다.
-
다음 섹션에서는 위의 두 클러스터링 방법에 대한 파라미터를 소개합니다.
EuclideanCluster
- 출력된 클러스터의 이웃점의 최대 거리
-
파라미터 설명: 이 파라미터는 클러스터 내 포인트 사이의 최대 거리를 설정하는 데 사용됩니다. 이 파라미터가 증가하면 서로 멀리 떨어진 포인트들이 동일한 클러스터로 그룹화됩니다. 이 파라미터가 감소하면 서로 가까이 있는 포인트들이 서로 다른 클러스터로 그룹화됩니다.
기본값: 3.000 mm
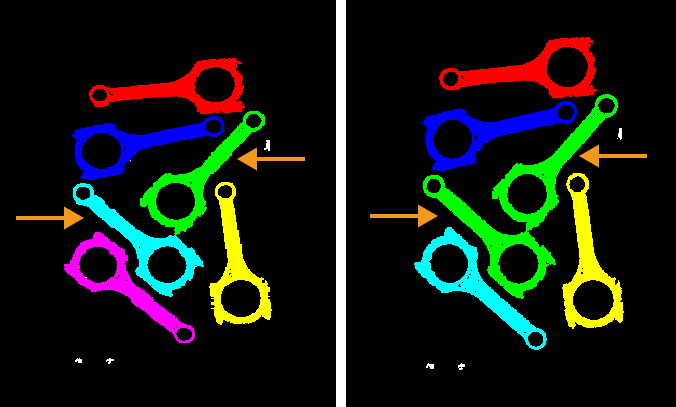
조정 예시: 아래 그림과 같이, 왼쪽 그림은 파라미터가 3.000mm일 때의 클러스터링 결과를 나타내고, 오른쪽 그림은 파라미터를 5.000mm로 조정한 후의 클러스터링 결과를 나타냅니다. 파라미터를 조정한 후 주황색 화살표가 가리키는 포인트 클라우드는 모두 녹색이 되며 동일한 클러스터로 그룹화됩니다.
- 클러스터당 최소/최대 포인트 개수
-
파라미터 설명: 이 파라미터로 클러스터링 결과를 필터링할 수 있습니다. 두 파라미터 값 사이의 포인트 개수를 가진 포인트 클라우드만 출력됩니다.
기본값: 800/3000000
조정 설명: 기본값을 사용하는 것이 좋습니다.
조정 예시: 클러스터링된 포인트 클라우드의 포인트 수가 각각 10000개, 20000개, 30000개, 40000개, 50000개라고 가정합니다. 클러스터당 최대 포인트 수가 45000이고 클러스터당 최소 포인트 수가 15000이면 10000과 50000의 클러스터가 필터링되고 출력 포인트 수는 20000, 30000 및 40000입니다.
RegionGrowingSeg
- 인접된 포인트 수
-
파라미터 설명: 이 파라미터는 각 포인트에 대해 비교할 이웃점의 수를 설정하는 데 사용됩니다. 이 파라미터가 증가하면 더 많은 포인트가 비교에 사용되므로 클러스터링 결과가 줄어듭니다.
기본값: 30
조정 설명: 기본값을 사용하는 것이 좋습니다.
- 평활도 역치
-
파라미터 설명: 이 값을 증가시키면 이웃점의 법선 방향 각도에 대한 허용 오차가 커지며, 법선 방향 각도 차이가 큰 포인트들도 여전히 같은 클러스터로 분류됩니다.
기본값: 4
조정 설명: 기본값을 사용하는 것이 좋습니다.
- 클러스터당 최소/최대 포인트 개수
-
파라미터 설명: 이 파라미터로 클러스터링 결과를 필터링할 수 있습니다. 두 파라미터 값 사이의 포인트 개수를 가진 포인트 클라우드만 출력됩니다.
기본값: 800/3000000
조정 설명: 기본값을 사용하는 것이 좋습니다.
조정 예시: 클러스터링된 포인트 클라우드의 포인트 수가 각각 10000개, 20000개, 30000개, 40000개, 50000개라고 가정합니다. 클러스터당 최대 포인트 수가 45000이고 클러스터당 최소 포인트 수가 15000이면 10000과 50000의 클러스터가 필터링되고 출력 포인트 수는 20000, 30000 및 40000입니다.