「ロボットの把持ずれ」のトラブルシューティング手順
「ロボットの把持ずれ」のトラブルシューティングは通常、下図のような手順に従って行います。
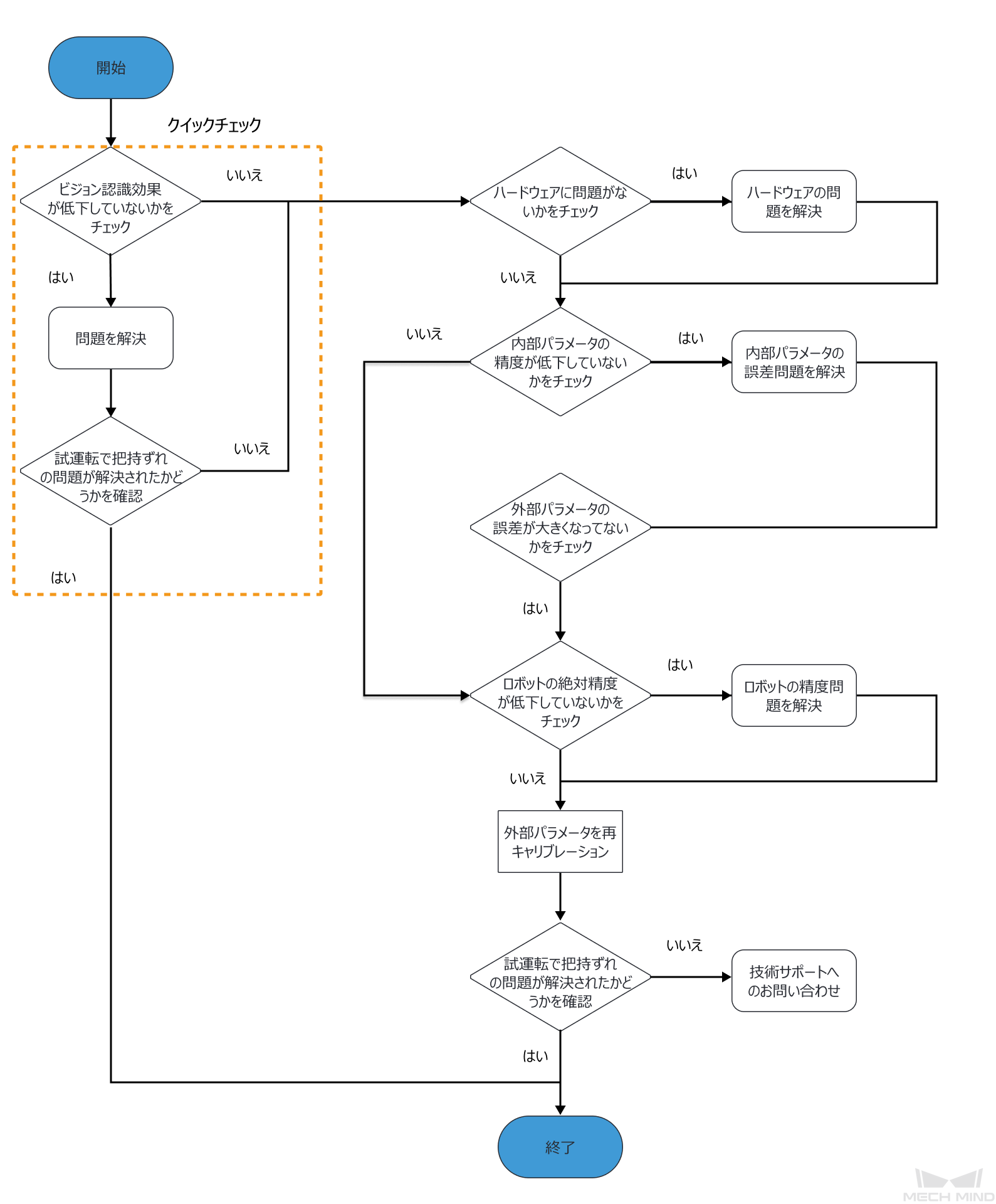
| 以下では、一般的なトラブルシューティング手順を説明します。各項目のチェック方法、基準、および誤差補正方法については、他の節をご参照ください。 |
クイックチェック
把持精度に最も影響に与える可能性が高い要因を特定し、認識精度が低下していないか を確認します。確認項目には、点群品質、ディープラーニングの推論効果(プロジェクトでディープラーニングを使用している場合)、および3Dマッチング精度が含まれます。
-
認識効果が低下している場合、すぐに問題の原因を特定し、テクニカルサポートに連絡して解決します。その後、試運転で把持ずれの問題が解決されたかどうかを確認します。
-
問題が解決された場合、トラブルシューティングは終了です。
-
問題が解決されていない場合、完全な手順に従ってトラブルシューティングします。
-
-
認識精度が低下していない場合、完全な手順に従ってトラブルシューティングします。
完全な手順
上記のクイックチェックでビジョンプロジェクトの認識精度が低下していないことが確認された場合は、以下の手順に従って問題を引き続きトラブルシューティングしてください。
-
-
問題がある場合、それを解決してから次の手順に進みます。
-
問題がない場合、次の手順に進みます。
-
-
-
誤差が大きくなっている場合、内部パラメータを補正してから次の手順に進みます。補正できない場合は、テクニカルサポートにお問い合わせください。
-
誤差が大きくなっていない場合、次の手順に進みます。
-
-
外部パラメータの誤差が大きくなっていないかを検証します。検証後は、次の手順に進みます。
-
ロボットの絶対精度に誤差が大きくなっていないかを確認します。
-
誤差が大きくなっている場合、ロボットの精度問題を解決してから次の手順に進みます。
-
誤差が大きくなっていない場合、次の手順に進みます。
-
-
-
問題が解決された場合、トラブルシューティングは終了です。
-
問題が解決されていない場合、テクニカルサポートにお問い合わせください。
-