要件を満たす把持精度の確認手順
実際のアプリケーションの各導入段階では、可能な誤差を減らし、把持精度がプロジェクト要件を満たすようにするために、適切な精度向上策を採用する必要があります。
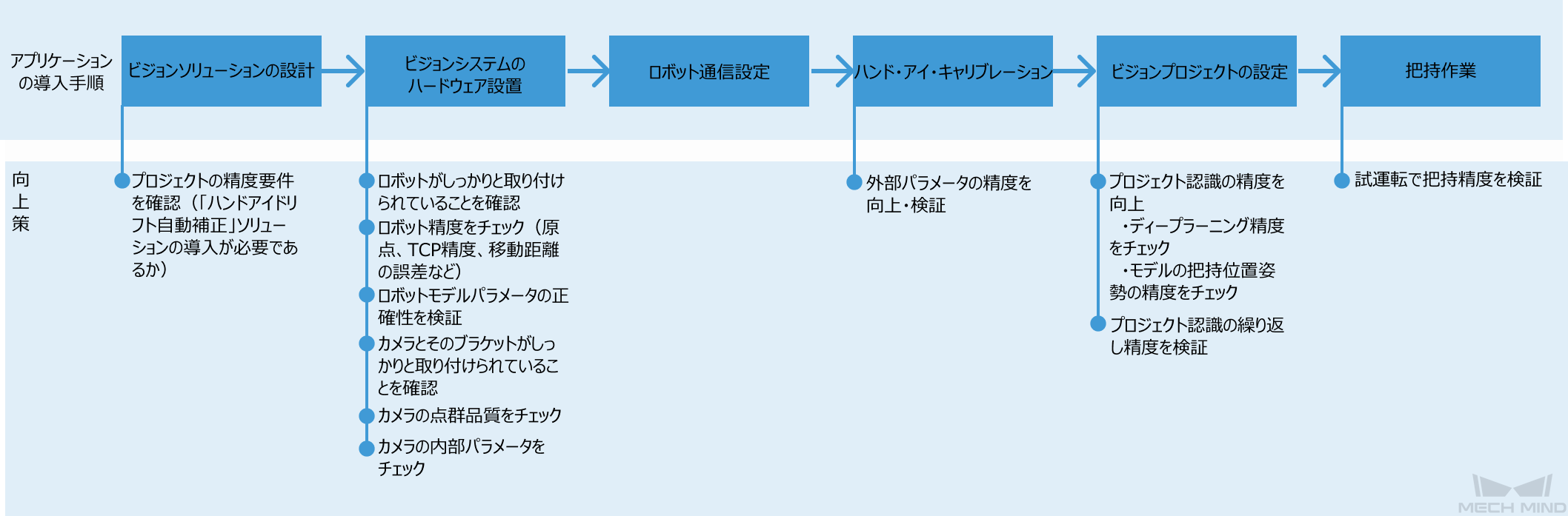
各段階で採用する精度向上策は以下の通りです。
| 導入段階 | 向上策 | 説明 |
|---|---|---|
1.ビジョンソリューションの設計 |
プロジェクトの精度要件を確認します。 |
アプリケーションを導入する前に、精度要件を事前に確認する必要があります。高精度が求められる場合、「ハンドアイドリフトの自動補正」ソリューションが必要であるかを確認する必要があります。 |
2. ビジョンシステムのハードウェア設置 |
ロボットがしっかりと取り付けられていることを確認します。 |
ロボットがしっかりと取り付けられていないと、ロボットの繰り返し精度に影響します。 |
ロボット精度を確認します。 |
ロボット原点がずれていないかをチェックし、移動距離の誤差とTCP精度を確認します。 |
|
ロボットモデルパラメータの正確性を検証します。 |
ロボットモデルパラメータが正確でない場合、ビジョンシステムから出力される経路点が正確でなくなり、さらには衝突を引き起こす可能性があります。 |
|
カメラとそのブラケットがしっかりと取り付けられていることを確認します。 |
カメラとそのブラケットがしっかりと取り付けられていないと、カメラの絶対精度と繰り返し精度に影響します。 |
|
カメラの点群品質を確認します。 |
カメラ点群の品質が低い場合、ビジョン認識の精度が低下します。 |
|
カメラの内部パラメータをチェックします。 |
カメラの内部パラメータが合格していることを確認します。 |
|
3. ロボット通信設定 |
/ |
/ |
4.ハンド・アイ・キャリブレーション |
外部パラメータの精度を検証・向上します。 |
外部パラメータの精度の誤差が大きすぎると、把持位置姿勢の誤差が大きくなります。外部パラメータの精度は、ハンド・アイ・キャリブレーションを行った後に検証する必要があります。 |
5.ビジョンプロジェクトの設定 |
プロジェクトの認識精度を向上させます。 |
認識アルゴリズムの選択、点群モデルおよび把持位置姿勢の精度は、出力される位置姿勢の精度に影響します。 |
プロジェクト認識の繰り返し精度を検証します。 |
ビジョンプロジェクトの設定が完了したら、ビジョンプロジェクトの出力される位置姿勢の繰り返し精度を検証する必要があります。 |
|
6. 把持作業 |
試運転によって把持精度を検証します。 |
生産ラインでビジョンシステムを正式に稼働させる前に、把持精度を検証するための試運転が必要です。 |
上記の手順に従って確認した後、精度向上策を参照してアプリケーションの全体的な把持精度を向上させることができます。