开始
开始你的第一个应用
软件使用指南
机器人通信配置指南
应用指南
附录
用于退出 任务集 时指定端口, 任务集 默认端口为 0。
退出任务集用于程序运行有多种可能结果时,选择退出任务集的端口。
详见 非移动任务基本参数 。
默认值:0
调节说明:用于指定 任务集 的输出端口,以便连接不同的逻辑处理。
上一层 任务集 显示的输出端口 = 退出端口号 + 1
退出端口号为 1,上一层任务集显示 2 个输出端口。
退出端口号为 0,上一层任务集显示 1 个输出端口。
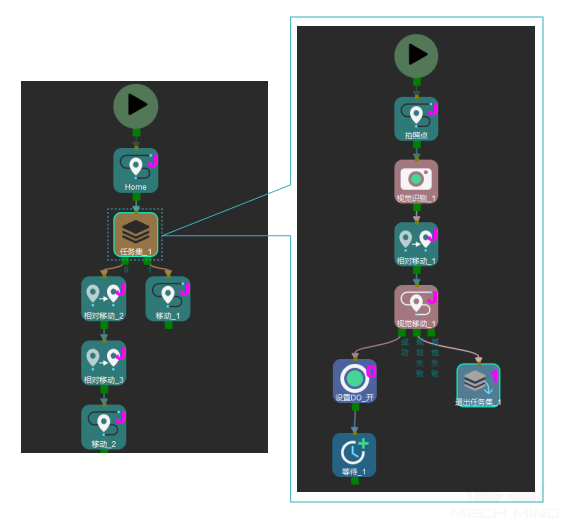
任务集中的 视觉移动 存在视觉识别成功、无视觉点或尝试抓取失败的可能,此时需要任务集有两个输出口,以分别连接不同的处理逻辑。
在 视觉移动 规划失败 出口处连接 退出任务集 ,将 退出任务集 任务参数中的 退出端口号 设置为 1 ,此时任务集增加一个输出端口,依据工程逻辑分别将两个输出端口连接到不同的任务。