Eye To Eye¶
双相机标定即标定两个相机之间的位姿关系,目前使用Eye To Eye来实现双相机位姿关系的标定,使用双相机标定可以扩大相机视野、提高两个相机重叠部分点云质量, 如下图1所示。
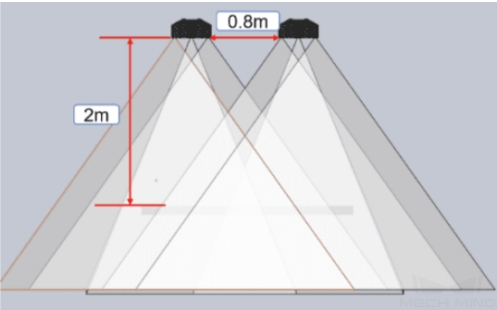
图1 双相机视野¶
多个随机标定板位姿
标定前提:所使用的两款相机分辨率一致,相机视野(2D&3D)重叠区域覆盖整个工作区域。
使用 Mech-Viz 或者控制手柄移动机器人将标定板放到两个相机视野重叠区域的中心位置,此时可分别连接相机采集图像来查看标定板位于视野当中的位置。 由 进入标定预配置,添加标定点方法选用“多个随机标定板位姿”,标定安装方式选择“Eye To Eye”,如下图2所示。

图2 选择标定安装方式¶
进入标定界面后连接两台相机,选择其中一台设为主相机,如下图3所示。

图3 设置主相机¶
接下来按照 Eye To Hand “多个随机标定板位姿”进行标定即可,界面显示的数据均为主相机的数据,副相机的数据会同步生成。标定结束后,会同时生成两台相机的外参数据,此时Eye To Eye标定完成。
利用已标定外参直接计算
使用Eye To Hand分别标定两台相机外参的外参后,再使用Eye To Eye来计算两台相机的位姿关系。 打开相机标定,标定安装方式选择Eye To Eye,在“选择添加标定点方法”中选择“利用已标定外参直接计算”,并选取先前分别标定的外参数据,如下图4所示。
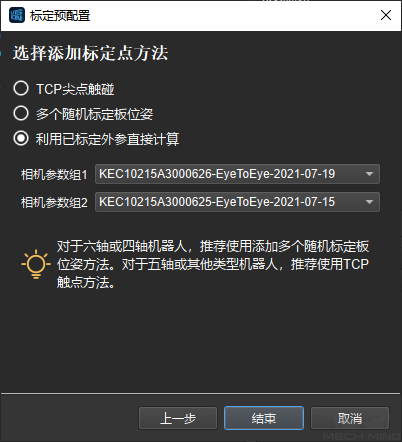
图4 选择添加标定点方法¶
设置完成后进入标定界面,不需要连接相机,直接进入“计算相机参数”,点击 计算相机参数 即可得出两款相机的位姿关系,点击 在Mech-Viz中显示当前点云 ,生成融合后的点云,如下图5所示。若点云融合效果不好,需重新分别标定两个相机的外参。

图5 查看点云¶
通过在Mech-Vision中搭建工程查看双相机标定融合效果
工程搭建如下图6所示,注意勾选“无输出时触发控制流”与“有输出时触发控制流”
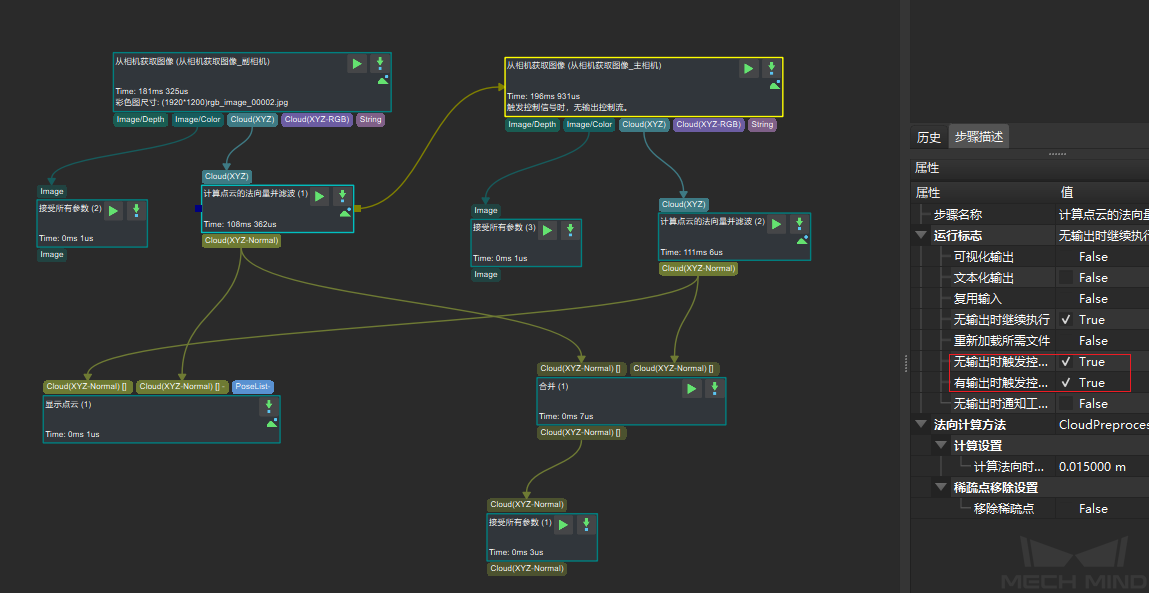
图6 工程搭建¶
单步运行“合并数据”步骤,显示融合后的点云。 合并数据后输出的点云即为融合后的整体点云,如下图7所示,同时可点击左上角 View as Whole| 1 | 2 来切换点云。

图7 融合点云¶