피킹 정확도를 향상시키는 방법
실제 애플리케이션 배포의 모든 단계에서 가능한 오차를 줄이고 프로젝트 요구 사항을 충족하는 피킹 정확도를 보장하기 위해 맞춤형 정확도 향상 조치가 필요합니다.
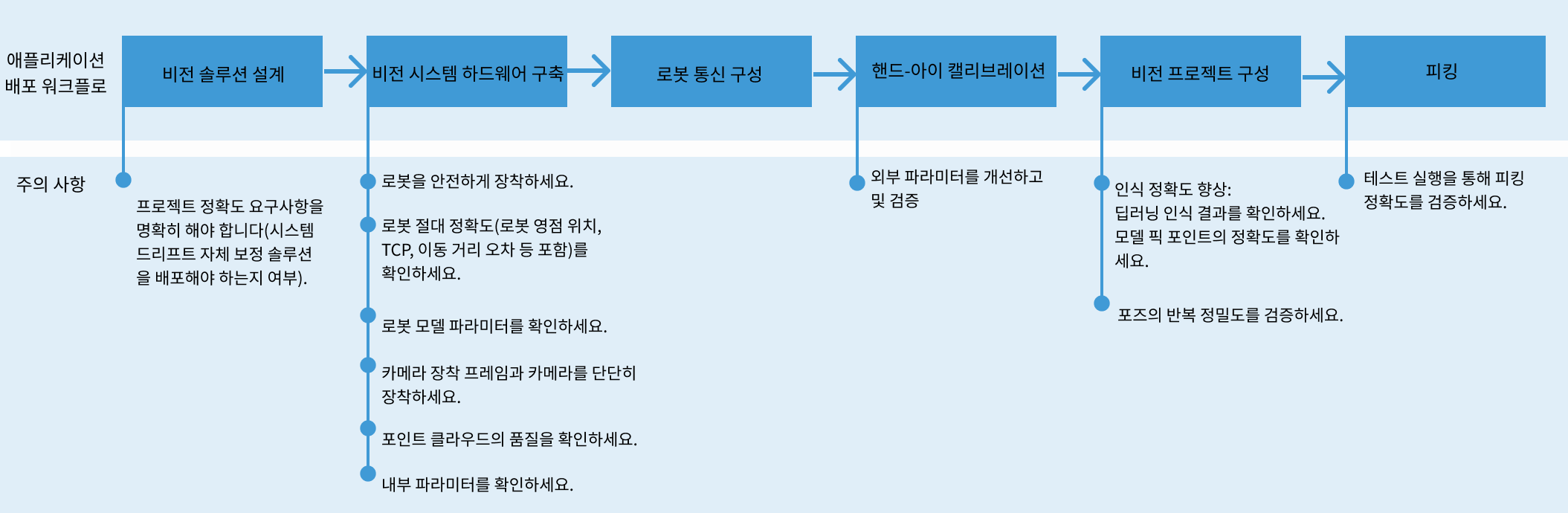
각 배포 단계에서의 개선 조치는 아래와 같습니다.
| 배포 단계 | 개선 조치 | 설명 |
|---|---|---|
1. 비전 솔루션 설계 |
프로젝트 정확도에 대한 요구 사항 확인 |
애플리케이션을 배포하기 전에 애플리케이션이 충족해야 하는 프로젝트의 정확도 요구 사항을 확정해야 합니다. 고정확도 시나리오의 경우 시스템 드리프트 자체 보정 솔루션의 배포 여부를 확인해야 합니다. |
2. 비전 시스템 하드웨어 구축 |
로봇이 안정하게 설치됨을 확인 |
로봇의 설치가 안정하지 않으면 로봇의 절대 정확도와 반복 정밀도에 영향을 미칩니다. |
로봇 정확도 검사 |
로봇의 영점 위치가 누락되었는지 확인하고 이동 거리 오차를 검사하며 TCP 정확도를 확인합니다. |
|
로봇 모델 파라미터의 정확도 검증 |
로봇 모델의 파라미터가 정확하지 않으면 비전 시스템에서 출력한 웨이포인트가 정확하지 않아 충돌을 일으킬수도 있습니다. |
|
카메라 스탠드와 카메라가 단단히 설치됨을 확인 |
카메라 스탠드와 카메라의 설치가 안정하지 못하면 카메라의 절대 정확도와 반복 정밀도에 영향을 미칩니다. |
|
카메라 포인트 클라우드 품질 검사 |
카메라 포인트 클라우드의 품질이 좋지 않으면 비전 인식의 정확도에 영향을 줄 수 있습니다. |
|
카메라 내부 파라미터 검사 |
요구 사항을 충족할 수 있도록 카메라 내부 파라미터를 검사합니다. |
|
3. 로봇 통신 구성 |
/ |
/ |
4. 핸드-아이 캘리브레이션 |
외부 파라미터 정확도 향상 및 검증 |
외부 파라미터 정확도 오차가 너무 크면 피킹 포즈의 오차가 증가할 수 있습니다. 핸드-아이 캘리브레이션 후 외부 파라미터의 정확도를 검증해야 합니다. |
5. 비전 프로젝트 구성 |
프로젝트 인식의 정확도 향상 |
알고리즘의 선택, 포인트 클라우드 모델 및 픽 포인트 정확도는 출력 포즈의 정확도에 영향을 미칩니다. |
프로젝트 인식의 반복 정밀도 검증 |
구성이 완료된 후 비전 프로젝트에서 출력한 포즈의 반복 정밀도를 검증해야 합니다. |
|
6. 피킹 |
테스트 실행으로 피킹 정확도 검증 |
비전 시스템을 공식적인 생산 라인에 사용하기 전에 피킹 정확도를 검증하기 위한 테스트 작업이 필요합니다. |
다음으로는 개선 조치에 따라 애플리케이션의 전반적인 피킹 정확도를 향상시킬 수 있습니다.