ソリューション概要
本節では、ステーターソリューションの概要を紹介します。適用シーンとソリューションの強み、技術要件などについて説明していきます。
適用範囲
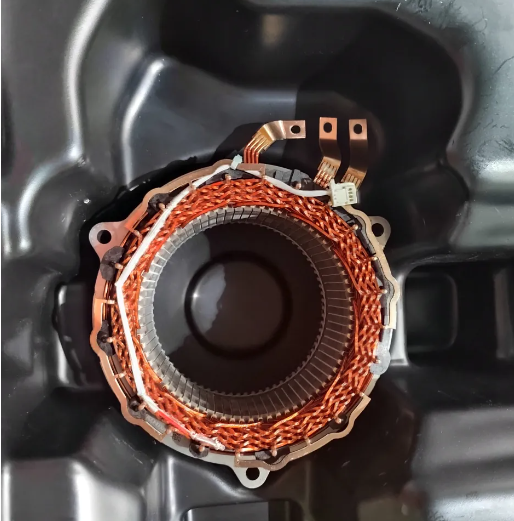
以下の表では、本ソリューションに適用可能な部品のタイプと材質、積み方、部品箱の種類を示しています。
| 適用範囲 | 説明図 | |
|---|---|---|
部品のタイプ |
ステーター |
|
部品の材質 |
金属 |
|
積み方 |
整列して並べられている |
|
部品箱 |
パレット |
|



ソリューションの強み
本ソリューションは以下のような機能を実現できます。
-
あらゆる仕様のステーターピックアップに適用可能。
-
最先端のカメライメージングアルゴリズムを使用し、ステーターとパレットの画像を安定して生成します。
-
最先端の認識アルゴリズムを使用してステーターの向きを確実に認識します。
-
ソフトウェアのサンプルプロジェクトを使用し、本節の説明を参考にして、誰でも簡単にビジョンシステムを構築できます。
技術仕様
以下の表では、本ソリューションの要件を示しています。
| 位置決め精度 | 認識の成功率 | ビジョンシステムの処理時間 | 切り取り率 | デバッグ時間 |
|---|---|---|---|---|
±2mm |
99% 以上 |
4s 以内 |
99% 以上 |
8h×2(一種の部品)
|
|
ビジョンシステムの処理時間とは、カメラで画像を取得してから対象物の位置姿勢を出力するまでの時間です。 |