設計方法
本節では、深いかごの小型部品ソリューションの設計方法について説明します。ビジョンシステム実行、ソフトウェアの併用、カメラ・キャリブレーションボード型番の選択をそれぞれ説明します。
ビジョンシステムの運転
ビジョンシステムを以下のように運転します。

2つの段階に分けられます。
-
第一段階は、深いかごにある部品を認識して一定の数の部品を把持してから二次位置決め機構に配置します。この段階は、Mech-Vision の深いかごの小型部品プロジェクトを使用します。
-
第二段階は、二次位置決め機構にある部品を認識して把持したあと、位置合わせ機構に配置します。この段階は、Mech-Vision の二次位置決め機構の小型部品プロジェクトを使用します。
ビジョンシステムを設定後、変更済みのロボット把持プロジェクトを実行して深いかごからバラ積みされた小型部品を正確に把持することができます。
ソフトウェアの併用
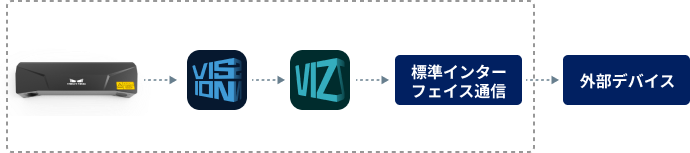
本ソリューションは、Mech-Vision で部品の位置姿勢を認識し、Mech-Viz で部品把持の経路を計画します。
下図にように、Mech-Viz は認識された位置姿勢に基づいて経路を計画し、標準インターフェース通信を通じてロボットや PLC などの外部デバイスに送信します。
カメラ型番の選択と設置
深いかごの小型部品供給の現場では、撮影視野や精度、ワーキングディスタンスに応じて高精度で高速、外乱光耐性を持つ Mech-Eye PRO S 産業用3DカメラおよびMech-Eye PRO M 産業用3Dカメラ(以下は PRO S カメラ、PRO M カメラ)をお勧めします。カメラの詳細な技術仕様については、PROシリーズ技術仕様をお読みください。その他の型番のカメラを使用する場合、3D カメラ型番選択ツールを使用してください。
カメラを選択したあと、3D カメラ型番選択ツールを使用してカメラを設置する高さを確認してください。詳細な手順は以下の通りです。
-
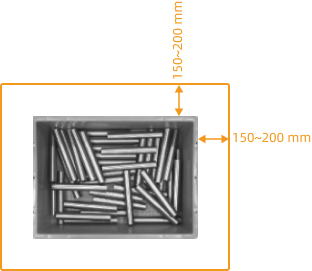
最高層の寸法と最大積み高さを確認してその値をそれぞれ対象物の寸法の横(mm)と幅(mm)、高さ(mm)に入力します。
供給されるコンテナの位置のばらつきが発生するので以下のように 4つの辺をいずれも 150~200mm 長くします。つまり、最高層の横と縦 + 150~200mm = 入力値。
-
カメラから対象物表面までの距離をオンにして右の画像が示すように長方形(対象物)がカメラの視野中央に位置するまで調整します。
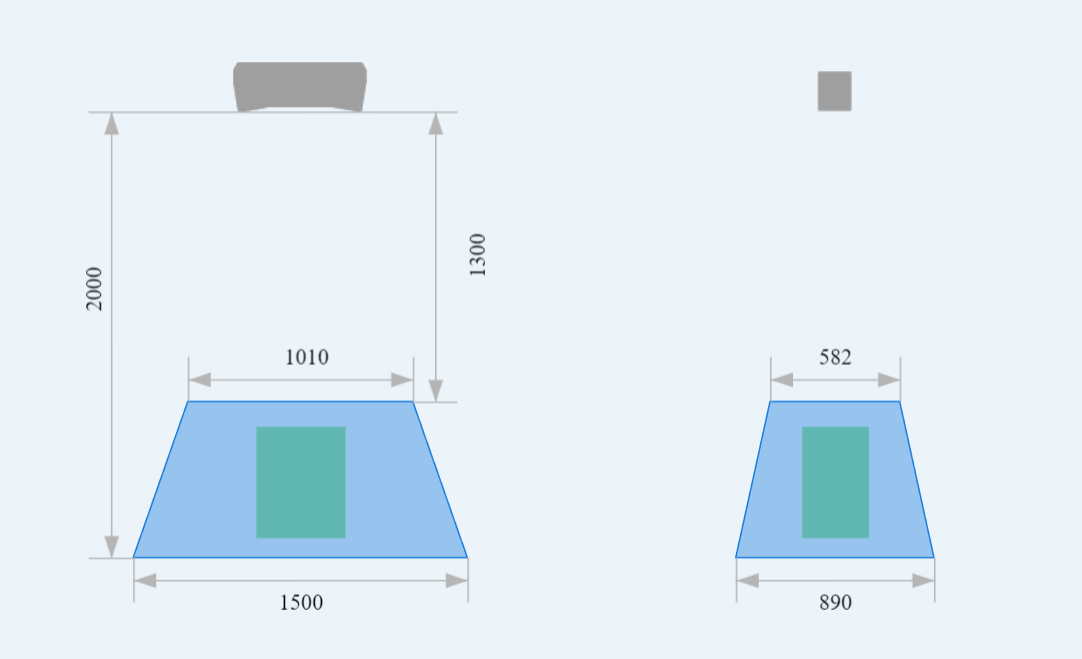
-
カメラを設置する高さ = カメラから対象物表面までの距離 + 対象物の積み高さ。
高品質のデータを取得するために、視野とロボット稼働スペースなどを確保した上、最高層対象物からカメラまでの距離を推奨ワーキングディスタンスの範囲内にしてください。
キャリブレーションボードの型番を選択
-
PRO S カメラ
-
カメラのワーキングディスタンスが 500~800mm の場合、CGB-020 を推奨します。
-
カメラのワーキングディスタンスが 800~1000mm の場合、CGB-035 を推奨します。
-
-
PRO M カメラ
-
カメラのワーキングディスタンスが 1000~1500mm の場合、CGB-035 を推奨します。
-
カメラのワーキングディスタンスが 1500~2000mm の場合、CGB-050 を推奨します。
-
IPC 型番の選択
Mech-Mind IPC STD を推奨します。これは、一般的なデパレタイズや部品ロード・アンロードに適用されます。
ロボット型番を選択
本ソリューションでは、把持の範囲と精度の要件に応じて高精度 6 軸ロボットを使用します。ここでは FANUC_M_10ID_12 を使用して説明します。
他のメーカーのロボットを使用する場合に、ロボットのモデル選択をお読みください。
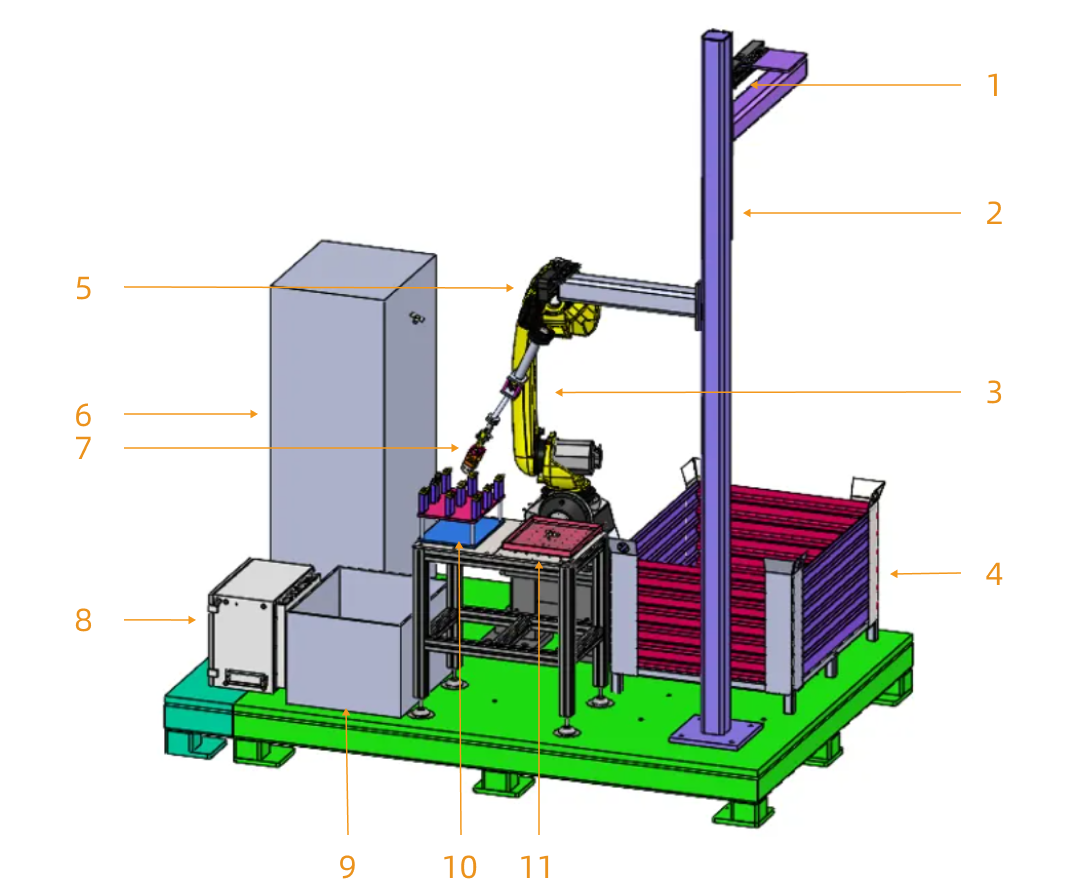
ワークステーションのレイアウト
現場では以下のように設置します。PRO M カメラをかごの真上 2 メートルに設置し、撮影するとかごとその中の部品の点群データを取得できます。PRO S カメラを二次位置決め機構の真上 1 メートルに設置し、撮影すると二次位置決め機構にある部品の点群データを取得できます。下図では、1-PRO M カメラ、2-カメラスタンド、3-ロボット、4-供給かご、5-PRO S カメラ、6-電気キャビネット、7-グリッパ、8-ロボット制御盤、9-一時使用コンテナ、10-位置合わせ機構、11-二次位置決め機構。