よくある課題
本節では小型板金部品ソリューションによくある課題と考えられる原因、対応策を紹介します。
課題一:経路計画の時間が長い
考えられる原因
-
Mech-Vision が出力した位置姿勢の順序は合理的でないため Mech-Viz での経路計画が頻繁に失敗します。
-
Mech-Viz プロジェクトのパラメータが正確に設定されていません。
-
Mech-Viz で経路を計画する時、必要以上の対称性把持試行が複数回行われます。
解決法
-
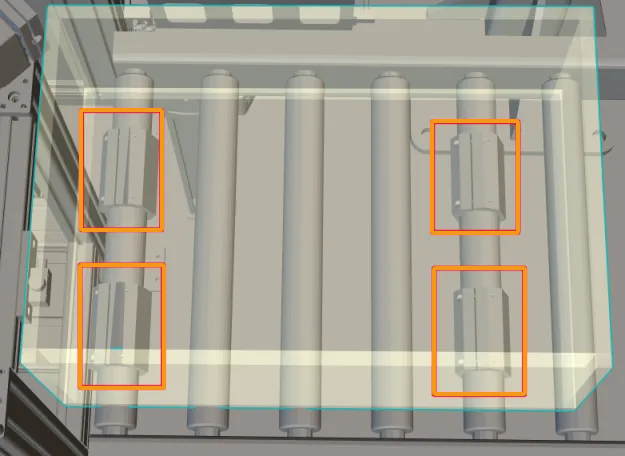
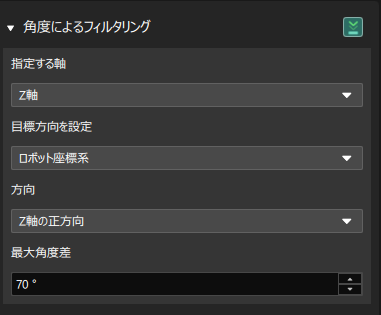
位置姿勢調整ツールを使用してフィルタリングします。例えば、角度によるフィルタリングによって試行できない把持角度を除去します。
-
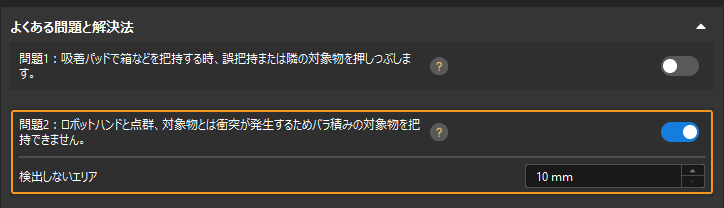
Mech-Viz で時間がかかり、かつ必要ではない機能を無効にします。例えば、衝突検出設定パネルのよくある問題と解決法の問題1をオフにして対象物点群を保持します。

-
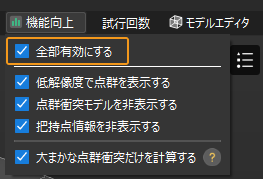
Mech-Viz のツールバーの機能向上のオプションをいずれもオンにします。
-
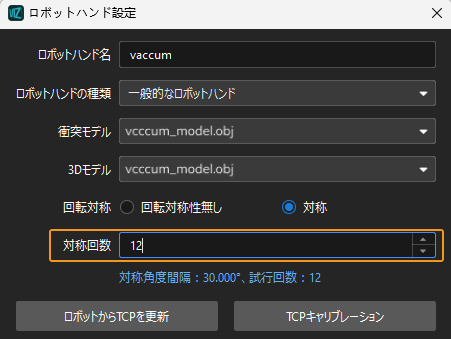
ロボットハンドを設定する時、実際に応じて対称回数を設定し、不要な把持試行をできる限り回避します。
課題二:経路計画が失敗する
課題三:点群モデルのマッチング失敗・認識漏れ
考えられる原因
-
マッチングによって取得した位置姿勢の数が最大出力の数に達しました。
-
マッチングによって取得した位置姿勢のスコアは信頼度しきい値より低いです。
-
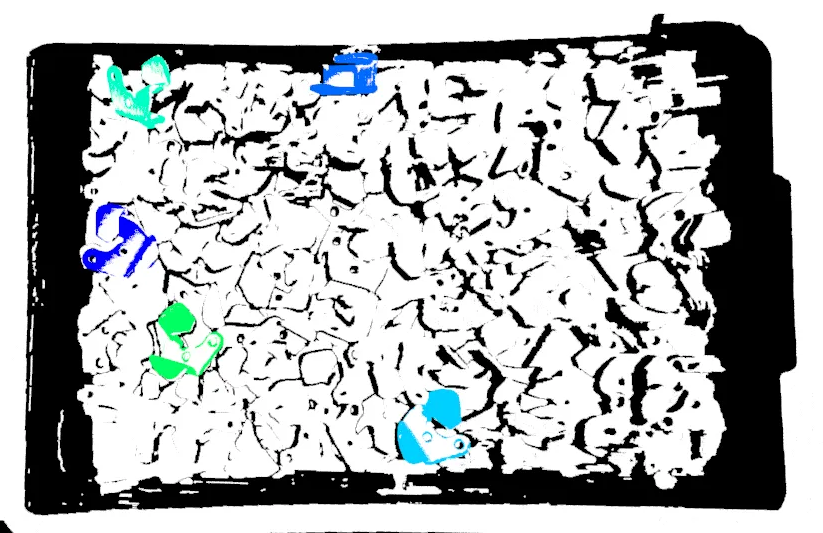
一部の部品が設定したしきい値以上の面積積み重ねられているため認識漏れが発生します。
-
対象物の点群抜けから認識漏れが発生します。
解決法
-
出力結果の最大数の値を高くします。
-
実際に応じて信頼度しきい値を調整してスコアの低い位置姿勢を除去します。
-
積み重ねられた部品の把持を許容する場合に重なり合う比率のしきい値と重なり率のしきい値を高くします。
-
Mech-Eye Viewer でカメラ露出のパラメータを調整してコーディングモードを反射に設定して完全な部品点群を取得します。カメラパラメータについてより詳細な説明は、カメラパラメータをお読みください。