構造化光カメラの動作原理
Mech-Eye 産業用 3D カメラ(以下「3D カメラ」)は、2D カメラとプロジェクターで構成された 3D カメラです。プロジェクターの投光により、3D カメラは対象物の深度データを収集できるほか、一般的な 2D カメラと同じく対象物の 2D 画像も取得できます。
3D カメラの動作は、データキャプチャ、計算・処理、出力の 3つの段階に分けられます。以下では各段階を詳しく説明していきます。
データキャプチャ
3D カメラは、対象物の 2D データと 3D データを同時に取得します。
-
3D データを取得する
-
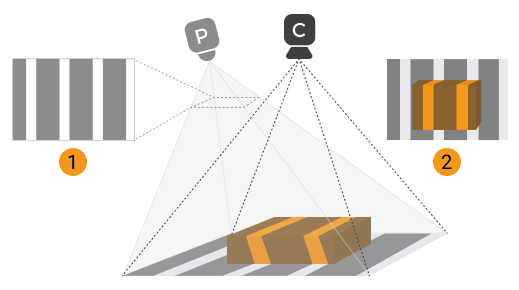
プロジェクター(下図の P)でパターン光(下図の①)を対象物の表面に投影します。対象物の形状でパターン光も変形します。
-
2D カメラ(下図の C)は変形したパターン光と対象物を写した画像を収集します。
-
プロジェクターは持続的に異なるパターンの構造化光を投影し、2D カメラが全部の構造化光が投影されるまで画像を収集し続けます。
-
-
2D データを取得します。プロジェクターが構造化光を投光しない時は、2D カメラは対象物の 2D 画像を収集します。