構造化光カメラの動作原理
Mech-Eye 産業用 3D カメラ(以下は「3D カメラ」)は、2D カメラとプロジェクターで構成された 3D カメラです。プロジェクターによって所定の構造化光を対象物に投影し、構造化光のパターンは、対象物の形状によって歪められます。3D カメラで撮った歪められた構造化光に基づいて対象物の深度を取得します。
3D カメラは、2D カメラと同じく 2D 画像を取得することができます。
画像を取得・確認するには、以下の三つのステップを実行してください。
撮影
Mech-Eye SDK を使用して 3D カメラをトリガーして画像を撮影します。以下は撮影のプロセスです。
-
プロジェクター(下図の P)でパターン光を対象物の表面に投影します。対象物の形状によってパターン光が歪められます。
-
2D カメラ(下図の C)を使用して画像を撮影します。変形したパターン光の写真を取得します。
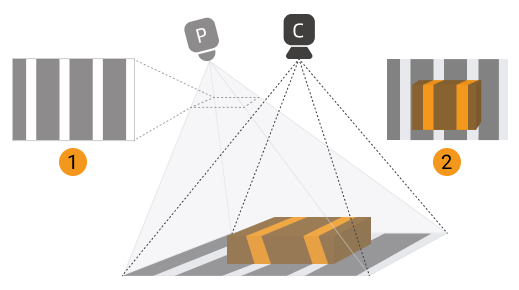
同時に、3D カメラは、構造化光で投影されていない対象物 2D 画像も取得します。