カメラを使ってみる
本章では、カメラの梱包内容の確認から Mech-Eye Viewer で画像の収集までガイドしていきます。
1. 梱包内容の確認
-
お受け取りの際は、梱包に問題がないことを確認してください。
-
梱包箱内の『同梱品一覧』を確認し、商品や付属品に欠品や損傷がないことを確認してください。
| 上記の同梱品一覧は参照のみを目的としています。お買い上げ製品とは異なる場合があります。 |
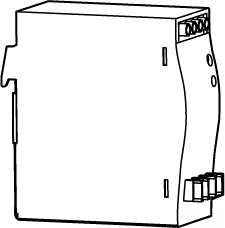
カメラ |
|
付属品袋 |
|
取扱説明書 |
|
キャリブレーションボード (UHP-140) |
|
DC 電源コード(20m) CBL-PWR-20M-LU |
|
ネットワークケーブル(20m) CBL-ETH-20M-LU |
|

-
オプションアクセサリー:
DIN レール電源
キャリブレーションボード
(UHP-140 を除く)
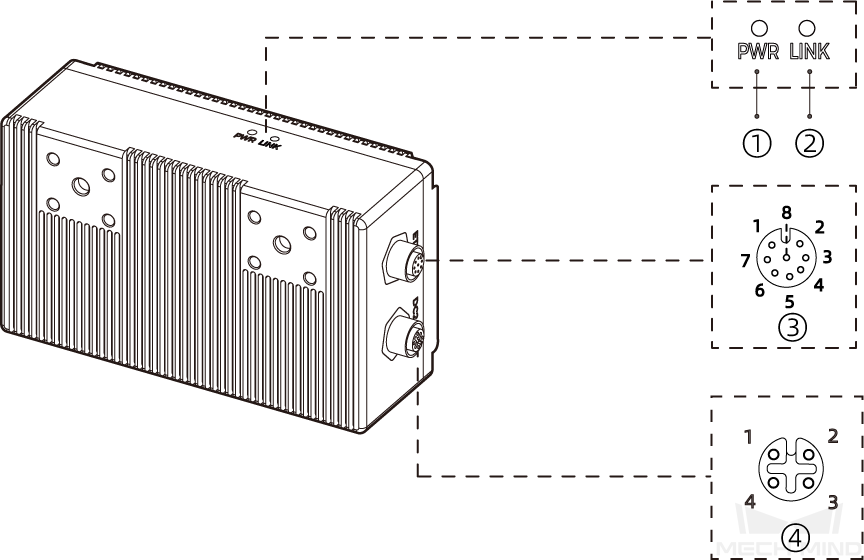
2. カメラのインターフェースとインジケーターの確認
以下の図面とグラフと照合してカメラのインターフェースとインジケーターの機能を確認してください。
2.1. PRO S/PRO M、DEEP、UHP-140、LSR S、LSR L

| 上記の画像は参照のみを目的としています。 |
No. |
名称 |
機能 |
|
|---|---|---|---|
① |
DC 24V 電源ポート |
1: GND |
2: GND |
3: 24V DC |
4: 24V DC |
||
② |
ETH ポート |
1: MD3_P |
2: MD2_N |
3: MD2_P |
4: MD0_P |
||
5: MD1_P |
6: MD0_N |
||
7: MD3_N |
8: MD1_N |
||
③ |
PWR インジケーター |
オフ:電源に接続されていない |
|
緑色点灯:正常電圧 |
|||
黄色点灯:異常電圧、ただしシステムは動作している |
|||
赤色点灯:異常電圧で使用できない |
|||
④ |
LINK 表示灯 |
オフ:ネットワークに接続されていない |
|
緑色点滅:データ転送中 |
|||
緑色点灯:データは転送されていない |
|||
⑤ |
SYS インジケーター |
オフ:システム未起動 |
|
赤色点灯:システム起動中 |
|||
緑色点滅:システムが正常に動作している |
|||
黄色点滅:エラーが発生したが、システムは動作している |
|||
赤色点滅:システムエラーで使用できない |
|||
⑥ |
SCAN インジケーター |
常時点灯:撮影および処理が進行中 |
|
オフ:撮影は進行していない |
|||
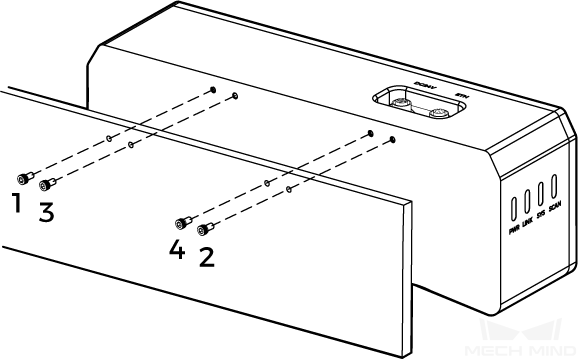
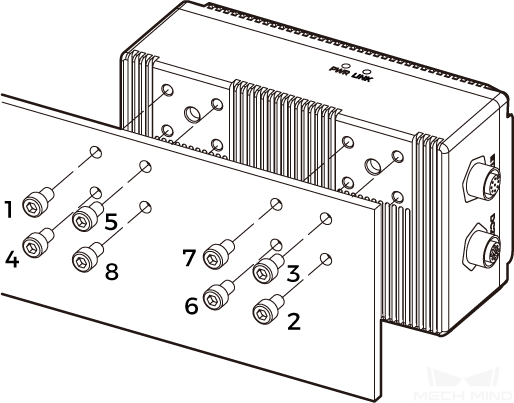
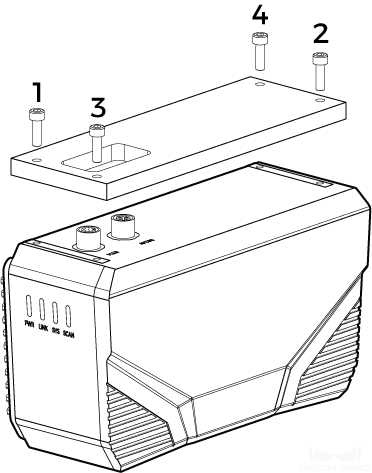
3. カメラの取り付け
いくつかの方法でカメラを取り付けることができます。実際の状況に応じて取り付けてください。
| カメラを取り付けるときに、レンチを用意してください。 |
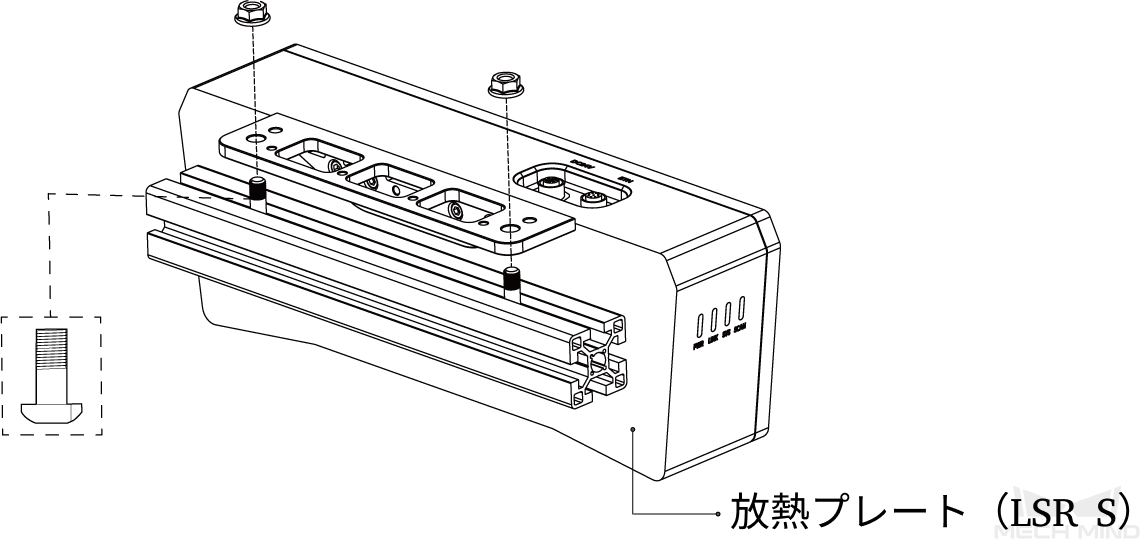
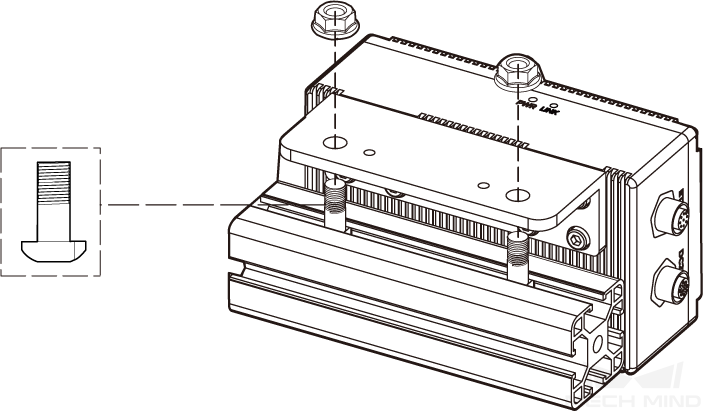
3.1. L 字型アダプターを使用して取り付ける
| カメラの出荷時に、L 字型アダプターと放熱プレート(LSR S の場合)がカメラの背面に取り付けられます。 |
下図に示すように、レンチを使用して 2 本のネジを締め、カメラを固定します。
-
PRO S/PRO M、DEEP、UHP-140、LSR S、LSR L:
-
NANO と PRO XS:
4. ケーブルの接続
以下の手順を実行してカメラのネットワークケーブルと電源コードを接続してください。
4.2. DC 電源コード
下図に示すように、DC 電源コードの航空コネクタプラグをカメラの DC 24V 電源ポートに差し込みます。
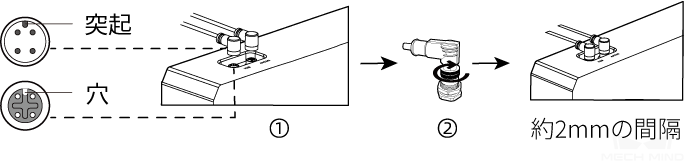
ネットワークケーブルと DC 電源コードを接続する:
|
|
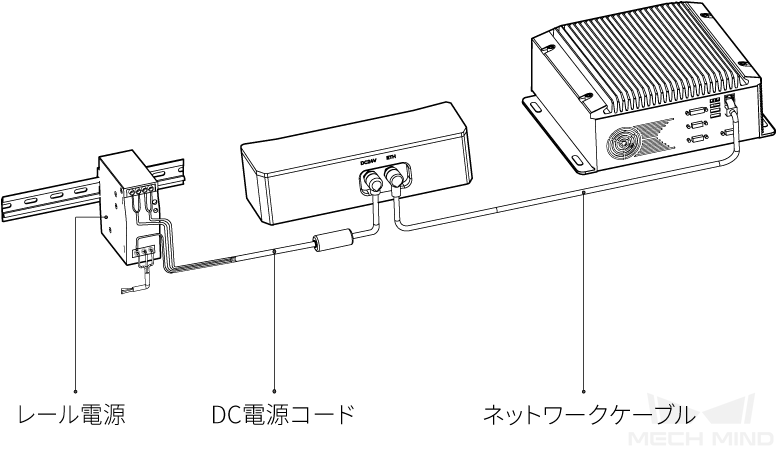
5. DIN レール電源
|
|
|
NG |
OK |
|---|
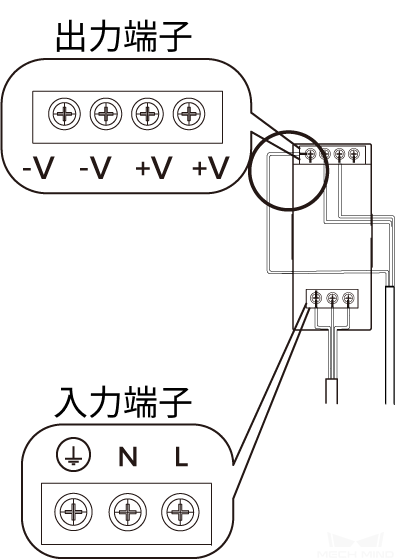
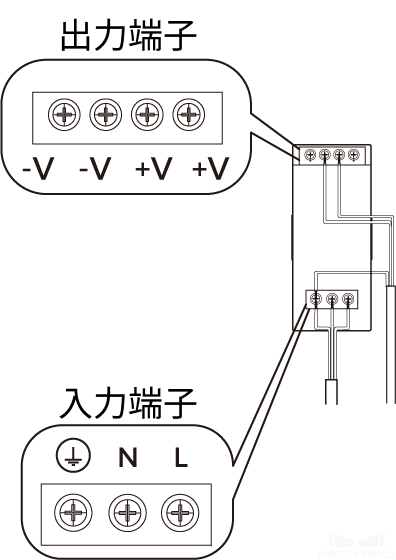
AC 電源ケーブルには、L、N、PE(![]() )の 3つの接続プラグがあります。
)の 3つの接続プラグがあります。
DC 電源コードには、+V、 -V 、PE(![]() )の 3つの接続プラグがあります。
)の 3つの接続プラグがあります。
DIN レール電源コードを接続する場合は、対応する入出力電圧端子にプラグを接続する必要があります。
![]() ワーニング
ワーニング
-
DIN レール電源は配電ボックス内に設置して使用してください。
-
DIN レール電源または DIN レール電源を接続するレールを、確実に接地する必要があります。レールに複数の電源を設置する場合は、電源間に一定のスペースを確保してください。
-
AC コンセントは、接地極 (PE 線) 付きの単相 3 線式コンセントを使用してください。
これでカメラの設置と接続が完了します。これから Mech-Eye Viewer によるカメラの接続と撮影の方法を説明します。
6. Mech-Eye SDK のダウンロード・インストール
Mech-Mind ダウンロードセンターで Mech-Eye SDK インストールパッケージをダウンロードすることができます。
インストールパッケージを解凍してからインストールファイルをダブルクリックして Mech-Eye SDK をインストールします。詳しくは Mech-Eye SDK のインストールガイドをお読みください。
7. IP アドレス設定
カメラを接続する前に、以下の 2つの IP アドレスが同じネットワークセグメントにあり、かつ唯一のものであることを確認してください。
-
カメラ IP アドレス
-
カメラに接続されたコンピュータのネットワークポートの IP アドレス
以下の手順を実行してカメラの IP アドレスを設定します。
-
ダブルクリックして Mech-Eye Viewer を起動します。
-
接続したいカメラを選択して
 をクリックします。
をクリックします。 -
カメラの IP アドレスを設定します。
8. カメラの接続
-
Mech-Eye Viewer で接続するカメラを見つけて接続をクリックします。
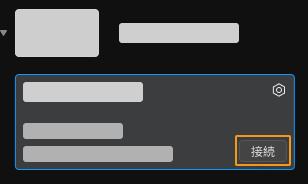
|
ソフトウェアまたはファームウェアをアップグレードする必要があるとき、アップグレードボタンが表示されます。まずクリックしてアップグレードしてから接続します。 |
9. 画像の取得
![]() をクリックして画像をキャプチャします。
をクリックして画像をキャプチャします。
|
|
画像キャプチャボタンの下にあるデータタイプのボタンをクリックして 2D 画像、深度画像、点群を切り替えることができます。
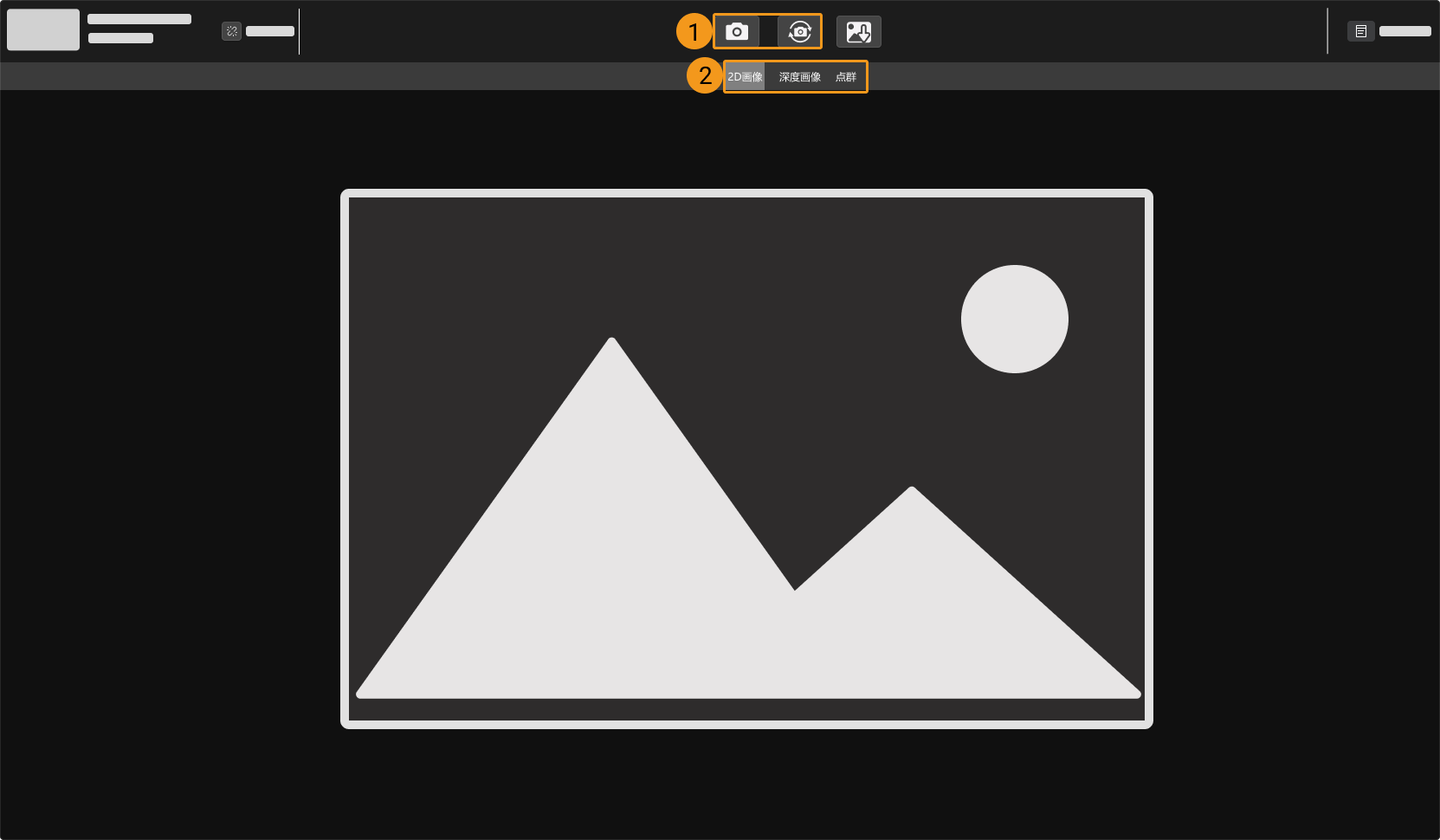
| 画像収集とデータタイプについて詳しくは画像のキャプチャとデータの確認をお読みください。 |
10. パラメータの調整
取得した 2D 画像、深度画像、点群の品質を改善したい場合、ソフトウェアのインターフェースの右にあるパラメータを調整して再試行してください。
10.1. データの品質を評価する
以下の基準に基づいてデータの品質を評価します。
-
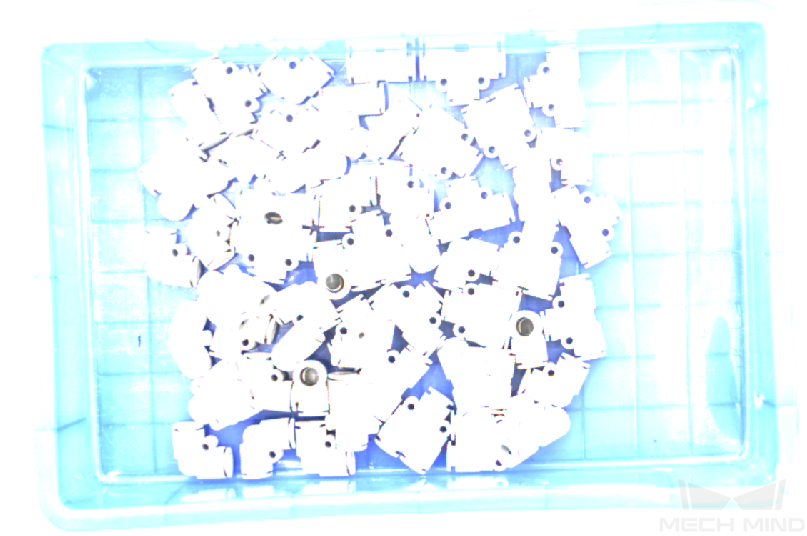
2D 画像:輝度が適切で、対象物の表面のディテールがはっきりと見られます。
暗い画像 適切な明るさ 明るい画像 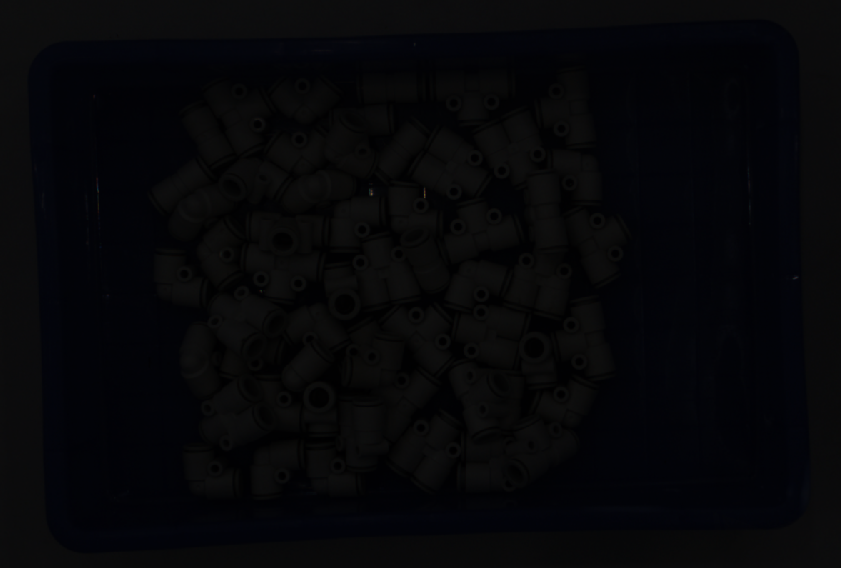

-
深度画像と点群:対象物のデータが完全に見られます。以下の例では、ローターの画像を取得します。
不完全な点群 完全な点群 
10.2. 2D 画像の品質を向上させる
-
2D パラメータグループの露出モードを Timed に設定し、露出時間を調整します。
-
暗い 2D 画像に対し、露出時間の値を大きくしてください。
-
明るい 2D 画像に対し、露出時間の値を小さくしてください。
DEEP と LSR カメラは 2 種類の 2D 画像を取得でき、異なるパラメータが調整できます。詳細は DEEP パラメータと LSR パラメータをお読みください。
-
-
再度画像をキャプチャして画像の品質を確認します。
10.3. 深度画像と点群の品質を改善する
-
3D パラメータグループの露出時間を調整します。
-
ダークカラーの対象物に対して露出時間の値を大きく調整します。
-
色が明るい対象物に対して露出時間の値を小さく調整します。
-
-
再度画像をキャプチャして深度画像と点群の品質を確認します。
| より詳しいパラメータの説明は、パラメータをお読みください。 |
11. データの使用
Mech-Eye Viewer によって収取した 2D 画像と深度画像、点群をローカルに保存できます。また、Mech-Vision あるいは他のビジョン処理ソフトウェアを使用して処理、計算することができます。
-
データを保存する:ツールバーの
 をクリックして保存場所を指定し、データのタイプを選択してから保存をクリックします。
をクリックして保存場所を指定し、データのタイプを選択してから保存をクリックします。 -
Mech-Vision でデータを保存する:ビジョンシステムの使用方法を参照して Mech-Vision を含むビジョンシステムを構築します。
-
他のソフトウェアでデータを使用する:Mech-Eye API あるいは GenICam インターフェースを介してカメラで収集したデータを他のソフトウェアに送信することが可能です。