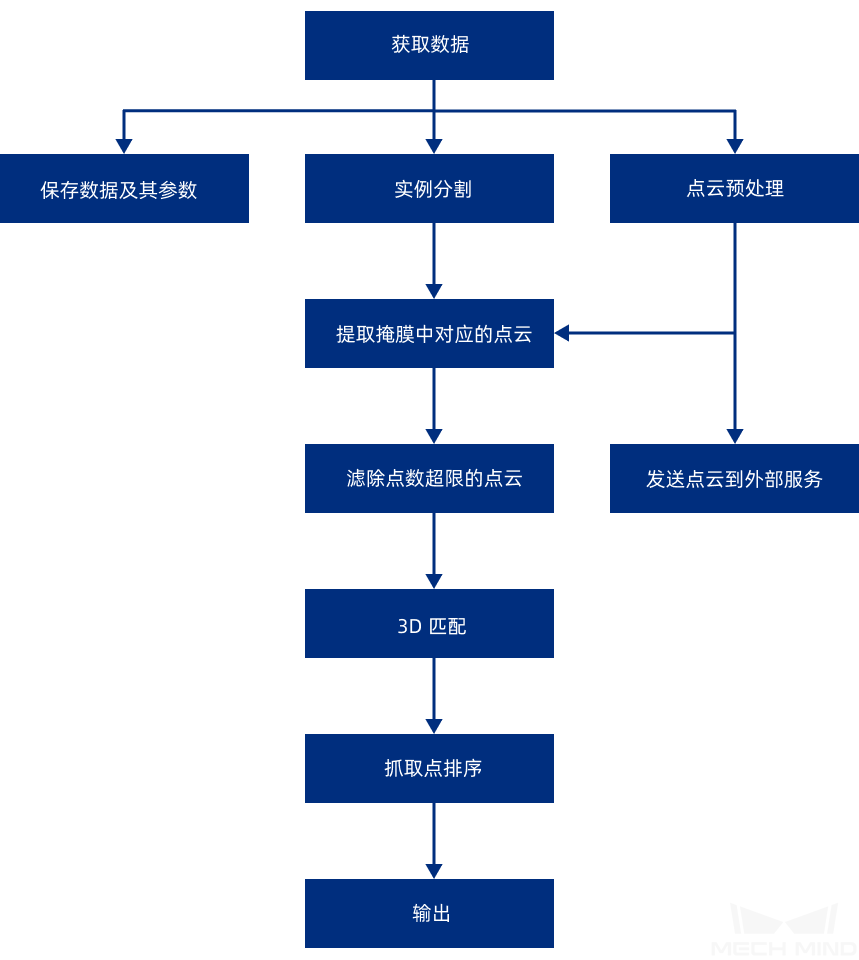
视觉处理流程及步骤详解
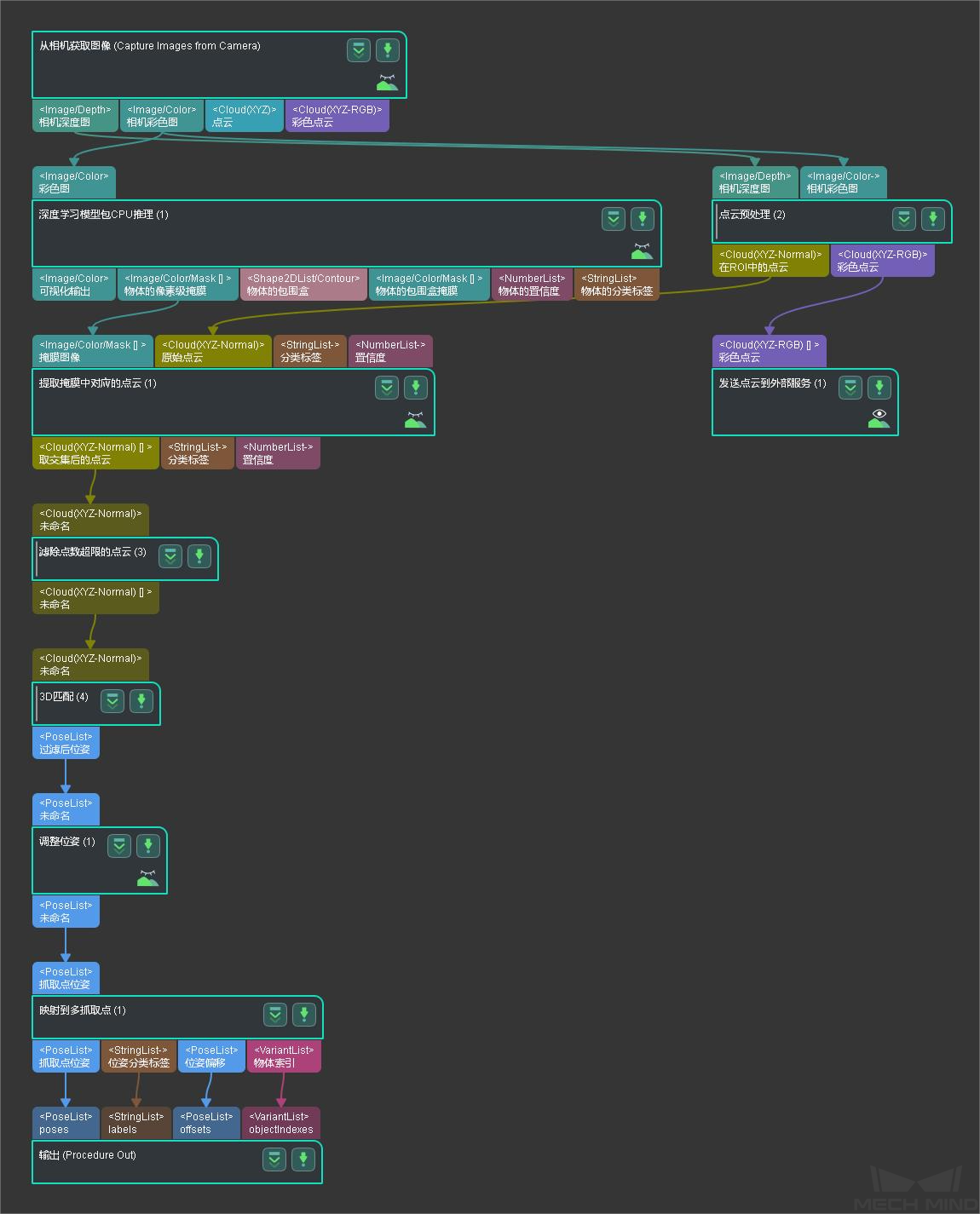
下图为工程截图,下文将对各部分进行详细讲解。
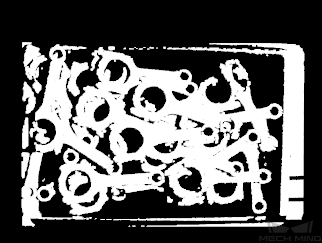
点云预处理
在小尺寸非平面工件典型应用工程中,通过深度图和彩色图生成点云,对点云进行法向量计算、滤波以及设置感兴趣区域。为后续运用点云进行工件 3D 匹配做准备。其结果如下图所示,具体详解见步骤组合 点云预处理 。
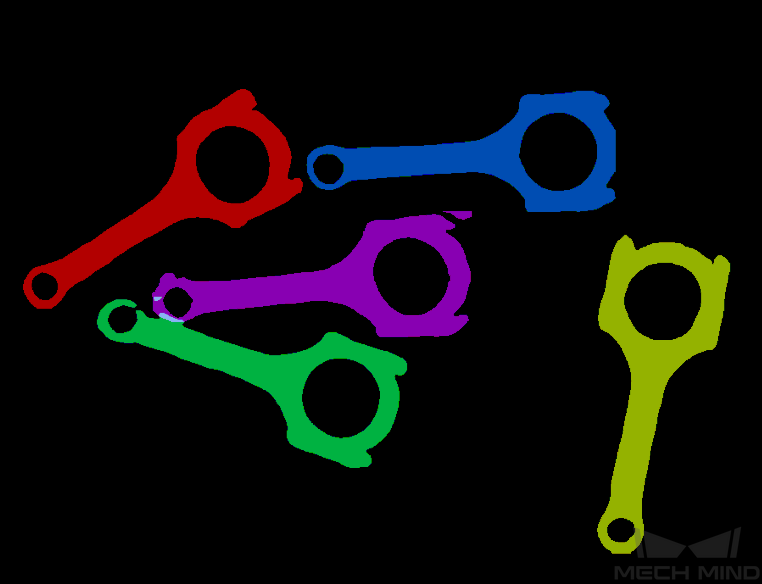
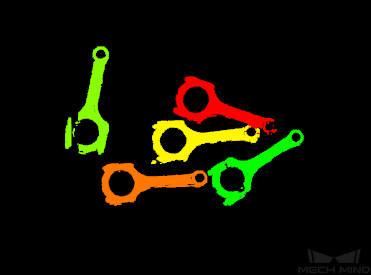
实例分割
在小尺寸非平面工件典型应用工程中,利用 深度学习模型包 CPU 推理 步骤对目标工件进行实例分割,找到工件的平面投影,生成掩膜,为后续生成工件点云做准备。其结果如下图所示。
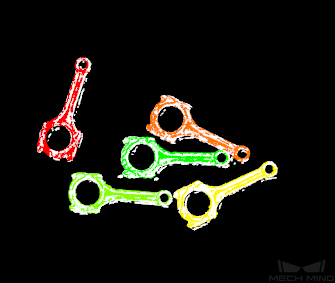
提取掩膜中对应的点云
当有了工件掩膜和点云,就可以得到掩膜下的点云。初步得到工件的点云模型。其结果如下图所示,具体详解见步骤 提取掩膜中对应的点云 。
滤除点数超限的点云
在生成工件点云后,对点云进行滤波。滤除对 3D 匹配有影响的点云,提高匹配精度。其结果如下图所示,具体详解见步骤组合 滤除点数超限的点云 。
3D 匹配
在对点云进行滤波之后,对工件进行3D匹配。并且得到抓取点。其 3D 匹配结果如下图所示,具体详解见步骤组合 3D 匹配 。
抓取点排序
在找到抓取点后,需要对抓取点进行转换坐标系、排序、映射多抓取点等一系列操作。具体内容可参考 抓取点排序 。