対象物設定¶
現場でプロジェクトを実行するとき、対象物を把持する位置姿勢は一つだけではありません。対象物の把持点の解を増加し、把持成功率を向上させるために、対象物設定パネルで対象物の回転対称、把持範囲などを設定することができます。
把持点 とは、対象物にある把持可能な位置を指します。把持点は対象物の座標系にあるので位置と方向は対象物を基準とします。普通、対象物の把持点の Z 軸は上向きです。下図では、青色の矢印は Z 軸です。
本節は、下記の内容について説明します。
把持点の解を求める¶
把持点の解を求めるには、Mech-Vision プロジェクトと Mech-Viz プロジェクトと合わせて実行します。下記のステップが必要です。
Mech-Visionの 3D位置姿勢をソート または 位置姿勢ステップ・エディタ を使用して対象物がある平面の高さや対象物の傾斜角度などによって対象物をフィルタリングしてソートします。
Mech-Vizでは、衝突を回避するために、Mech-Visionから受信した位置姿勢リストに基づき、対象物の対称性や把持範囲などを合わせて再度解を求めます。
Mech-Vision プロジェクトによって得られた位置姿勢順序によって把持点の解を求めます。
一番目の把持位置姿勢を使用して把持を試行する過程に衝突のリスクがあると判断されたら、対象物の対称性または把持範囲などを合わせてユーザーが設定した最適解戦略によって解を求めます。
上記の把持点を使用して把持を実行できない場合に、次の把持位置姿勢を使用します。
把持点の対称性¶
注釈
本節では、「対称性」とは「回転対称性」を指します。
回転対称とは、2 次元図形を一つの点を中心に回転させたら元の図形に完全に重なり合うことです。この点を回転対称の中心といい、回転させた角度を回転角度といいます。
現場ではよく対称性を持つ対象物を扱います。対象物の回転角度によって、ロボットのツールが対象物を把持、又は配置する際に複数の方式があります。本節では、対象物を三つの種類に分けて説明していきます。
対称性を持たない対象物¶

|
|
|
|
クローラシュー |
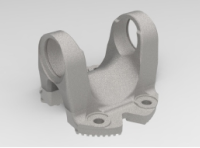
コネクタ |
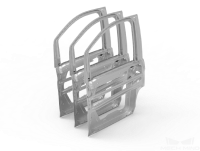
自動車ドア板金 |
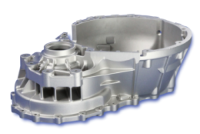
ハウジング |
対象物は対称性を持たず、ツールは把持の柔軟性を持たないため、対象物を配置する際に精確にターゲット位置に配置しなければならない場合に、デフォルトの設定(Xv/Y 軸に関して対称性がない、360°の Z 軸のステップサイズ、±180°の試行範囲)にします。

X/Y 軸に関して対称性を持つ対象物¶
|

|

|

|
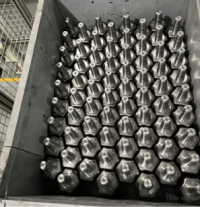
整列して並べられた反射する鋼棒 |
ばら積み鋼棒 |
ホースコネクタ |
ボルト |
ツールは柔軟性がなく、対象物は棒状などの曲面があるものです。このような対象物は、X また Y 軸に関しては対称性がありますが、Z軸に関しては対称性がありません。
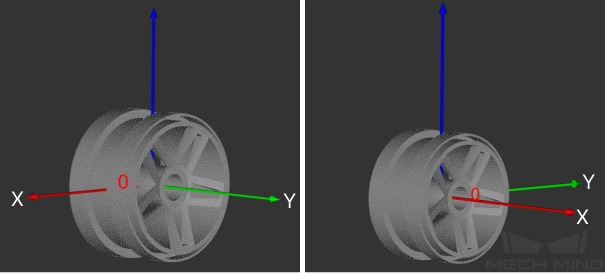
回転対称軸¶
Mech-Vision で設定された把持点によって設定します。
Mech-Vision のマッチングモデル・把持位置姿勢エディタツールを使用してで部品の把持点を設定します。左図では、把持点の Y 軸が回転対称軸です。右図では、把持点の X 軸が回転対称軸です。
ステップサイズ¶
任意の角度を回転させても対象物自身と形状が重なる部品があります。
このような部品に対して、ステップサイズを小さく設定すると実行の速度が遅くなり、大きくすると把持点を行き過ぎることがあるので、5° ~ 10° に設定することをお勧めします。
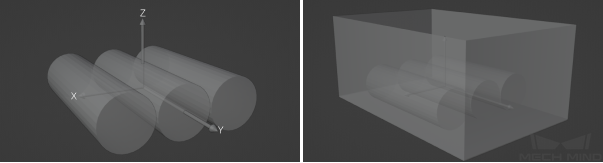
試行範囲¶
部品の把持可能な領域によって設定します。
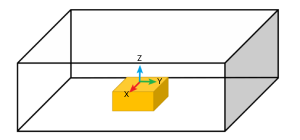
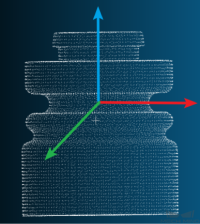
試行範囲 の値は、対象物の把持可能な表面領域に応じて設定します。下図に示すように、対象物は任意の角度でも回転対称性がありますが、把持可能な範囲は 360° よりずっと狭いです。

Z 軸に関して対称性を持つ対象物¶
|
|
|

|
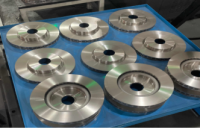
ブレーキディスク |
フランジ(180°) |
外輪(60°) |
段ボール箱(180°) |
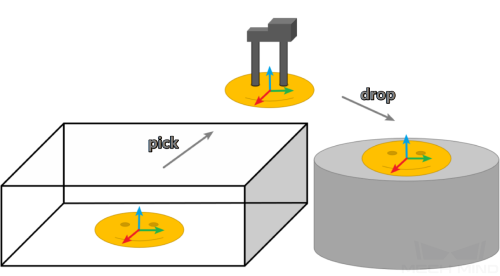
普通は、段ボール箱のデパレタイジングやディスク状、円柱状の物の把持に使用されます。対象物は Z 軸に関して対称性があります。ツールは対称性がなくても大丈夫です。ツールは把持点の Z 軸を中心に回転して対象物を把持します。
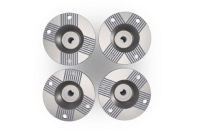
下図は、テーブルに配置された部品の上面図です。部品は、いずれも Z 軸に関して対称性を持っています。

把持と配置を考慮する場合(精確に配置する)¶
Z 軸のステップサイズを、部品の回転角度に設定します。
把持だけを考慮する場合(ランダムに配置する)¶
円型の吸盤を使用してばら積み部品を吸着して、または磁石を使用して金属部品を吸着してから指定された位置または箱に配置するようなプロジェクトでは、対象物の把持だけを計画します。対象物の対称性を考慮せずに、任意の角度でも回転対称性がある物として Z 軸のステップサイズを設定します。
例¶
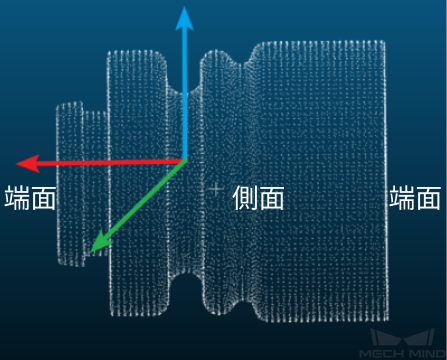
ばら積みの小部品、端面が上向きの部品を把持するとき、把持点の Z 軸に対しては任意の角度対称です。

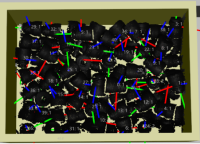
動作環境図
点群
部品端面把持点
下図のようにパラメータを設定します。

把持範囲¶
柔軟性のあるツール(特に吸盤)または対象物の場合、把持する時のある程度のズレが許容されます。把持範囲を設定することでロボット動作時の衝突や特異点などを回避できます。理論上は、把持範囲は把持点の「ズレ許容差」です。
以下の場合に使用します:
柔軟性のあるツールを使用するプロジェクト¶
下図では、吸盤を使用して小包を把持します。
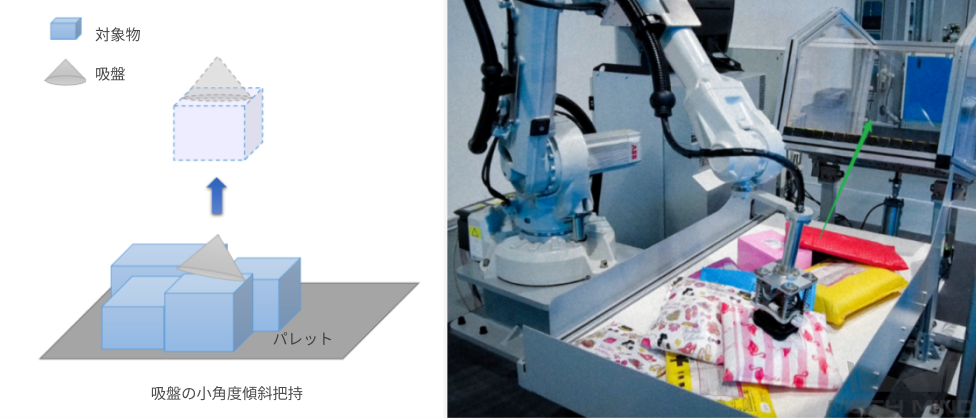
吸盤のスポンジは柔軟性があるため、把持する際に X と Y 軸の方向にある程度の傾斜が許容されます。試行範囲 を ±5°~±10° に、ステップサイズ を 2°~5° に設定することを推奨します。

回転対称性と把持範囲を合わせて使用
上記の小包把持の図では、把持された小包は Z 軸に関して 90° 回転対称です。把持範囲以外、Z 軸に関して対称性も設定(X/Y軸に関して対称性がない にチェックを入れる)できます。
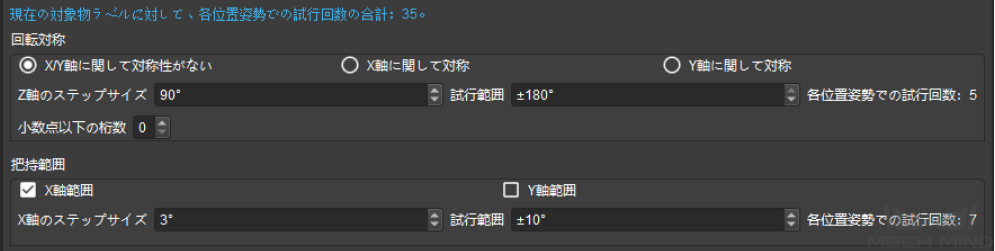
注意
各位置姿勢での試行回数の合計 = 回転対称の試行回数 × 把持範囲の試行回数
試行回数が多すぎると実行の速度が遅くなります。
精確な配置を求めないプロジェクト¶
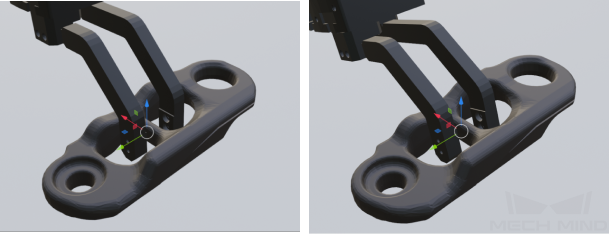
下図ではトラックリンクの把持を示します。トラックリンクは対称性がありませんが、ツールを把持点の X 軸を中心に一定の角度回転させても把持することができます。
回転させたら、ツールの位置姿勢が変わります。トラックリンクを配置する際に回転させた角度を相殺する必要があります。その場合トラックリンクの配置点にある位置姿勢も変わります。精確な配置が求められない場合にトラックリンクの配置位置姿勢がかわっても構いません。

下図のようにパラメータを設定します。

最適な把持の解選択戦略¶
最適な把持の解選択戦略は以下の通りです。
デフォルト:最小の全体回転角度 戦略を使用します。
最小の全体回転角度:これを選択したら、“把持-配置”の過程に、エンドツールがZ軸を中心に回転する角度が最も小さい位置姿勢を優先的に使用します。ロボットが対象物を把持してから余計な回転は発生しないので対象物の落下を回避できます。
最小の視覚位置姿勢との回転差:これを選択したら、Mech-Visionプロジェクトから受信した対象物位置姿勢との角度差が最も小さい位置姿勢を優先的に使用します。例えば、対象物の位置姿勢が [0,0,0,15,0,0] で、Z軸ステップサイズを60°に設定したら、ロボットが試行範囲で [0,0,0,75,0,0] と [0,0,0,-45,0,0] の位置姿勢を優先的に試行します。