按序列移动¶
功能描述
在机器人运动路径中按照序列设置多个 目标位姿 和移动到该位姿的 运动方式,并且按照设置的顺序执行各点位。
参数说明

注解
不检查碰撞 一般应用在机器人抓取物体后的1~2个移动类任务中,并且会导致机器人有碰撞风险,请谨慎使用。
开启 不检查与场景物体的碰撞 功能不会影响码垛场景中被抓物体与已放置箱子的碰撞检测。当码垛下方有场景物体时,可以使用该功能来避免码垛选解失败。
- 索引:
开始索引:从指定的索引点开始按阵列移动。
当前索引:当前按阵列移动的索引点。
每一次工程运行到 按序列移动 时,都会在 移动列表 中选择与 当前索引 相同的位姿进行移动,并且 当前索引 会在每一次运行完成后加一。可以使用 Adapter 工程来对 开始索引 和 当前索引 进行动态调整,使每一次都执行指定的移动。
- 一次走完所有目标:
- 勾选为True时, 索引 会失效并且Mech-Viz工程在执行到 按序列移动 时,机器人会一次性按照顺序执行所有移动列表中的点位。
- 使用全局运动参数:
- 勾选为True时,移动列表中的所有移动都会使用相同的 基本运动设置。
- 运动方式:
- 详见 运动方式 。 关节运动 一般适用于路径精度要求不高,机器人大范围运动的场景;而 直线运动 则适用于焊接、涂胶、抓取等路径要求较高的过程。
- 速度&加速度:
- 详见 速度&加速度 。通常 加速度 参数值应低于 速度 参数值。否则,机器人的运行动作会出现不协调。在 视觉移动 任务之前或者之后时, 速度 应该较慢以保证抓取的稳定性。
- 转弯半径:
- 详见 转弯半径 。
- 目标类型:
- 详见 目标类型 。
- 关节角约束条件 & 快速设定:
- 详见 关节角约束条件 。
- 移动列表:
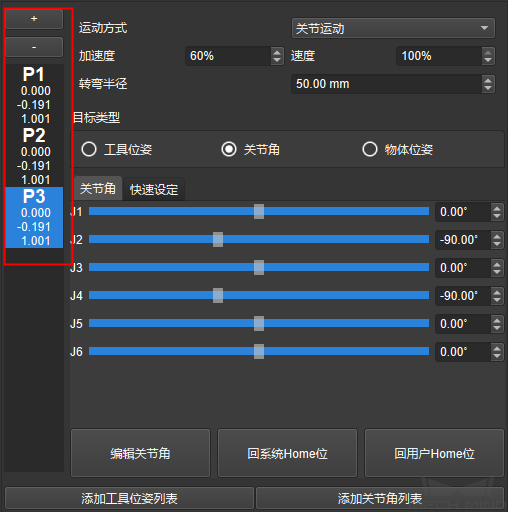 手动按顺序添加需要加入到 移动列表 中的点位,并且对其设置相关的移动参数。点击 + 可以在移动列表 末尾 增加一个点位,点击 - 则可删除选中的点位。
手动按顺序添加需要加入到 移动列表 中的点位,并且对其设置相关的移动参数。点击 + 可以在移动列表 末尾 增加一个点位,点击 - 则可删除选中的点位。
- 添加工具位姿列表:
 可以一次性按照 工具位姿 添加多个移动位姿到移动列表。进入添加界面后在每一行分别输入需要添加的 工具位姿 即可。
可以一次性按照 工具位姿 添加多个移动位姿到移动列表。进入添加界面后在每一行分别输入需要添加的 工具位姿 即可。
- 添加关节角列表:
 可以一次性按照 关节角 添加多个移动位姿到移动列表。进入添加界面后在每一行分别输入需要添加的 关节角 即可。
可以一次性按照 关节角 添加多个移动位姿到移动列表。进入添加界面后在每一行分别输入需要添加的 关节角 即可。