动态移动¶
功能描述
根据上次 视觉识别 结果中的最高位姿移动。一般用于EIH模式下,使得每一次移动到的拍照位置距离待识别物体适中。
参数说明
- 移动类基础参数:
- 详细说明请查看 移动类通用参数介绍 。
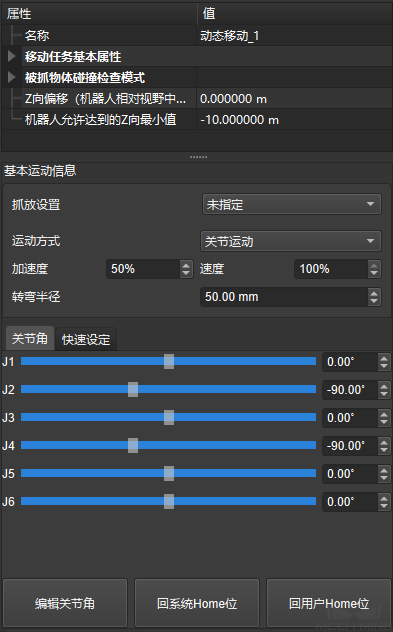
- Z向偏移(机器人相对视野中最高物体):
- 默认值:0调节说明:相机在EIH模式安装时,在物料被抓取的过程中需要保持相机拍照的高度为固定值,设定这个高度来保证机器人与工件的固定距离。 在设置这个参数后,机器人每执行一次动态移动,都会依据上一次 视觉识别 的最高位姿的Z值调整动态移动的Z值高度。
- 机器人允许达到的Z向最小值:
- 默认值:-10调节说明:在设置动态移动Z向偏移的时候,允许机器人能达到的Z向的最小值。防止机器人移动时因为位置过低而发生碰撞或者不可达。
- 基本运动信息:
- 详细说明请查看 基本运动信息 。
- 关节角:
- 调节说明:在EIH模式下,初始的拍照位姿大多为固定的位姿,因此这里只能输入初始拍照位置的关节角信息,以保证初始拍照位置的机器人姿态不变。 在设置完机器人的关节角后,软件在执行动态移动后会自动计算当前的工具位姿,方便查看当前的Z向信息。关节角调整快捷操作请查看 目标类型 。