快速了解 Mech-Viz¶
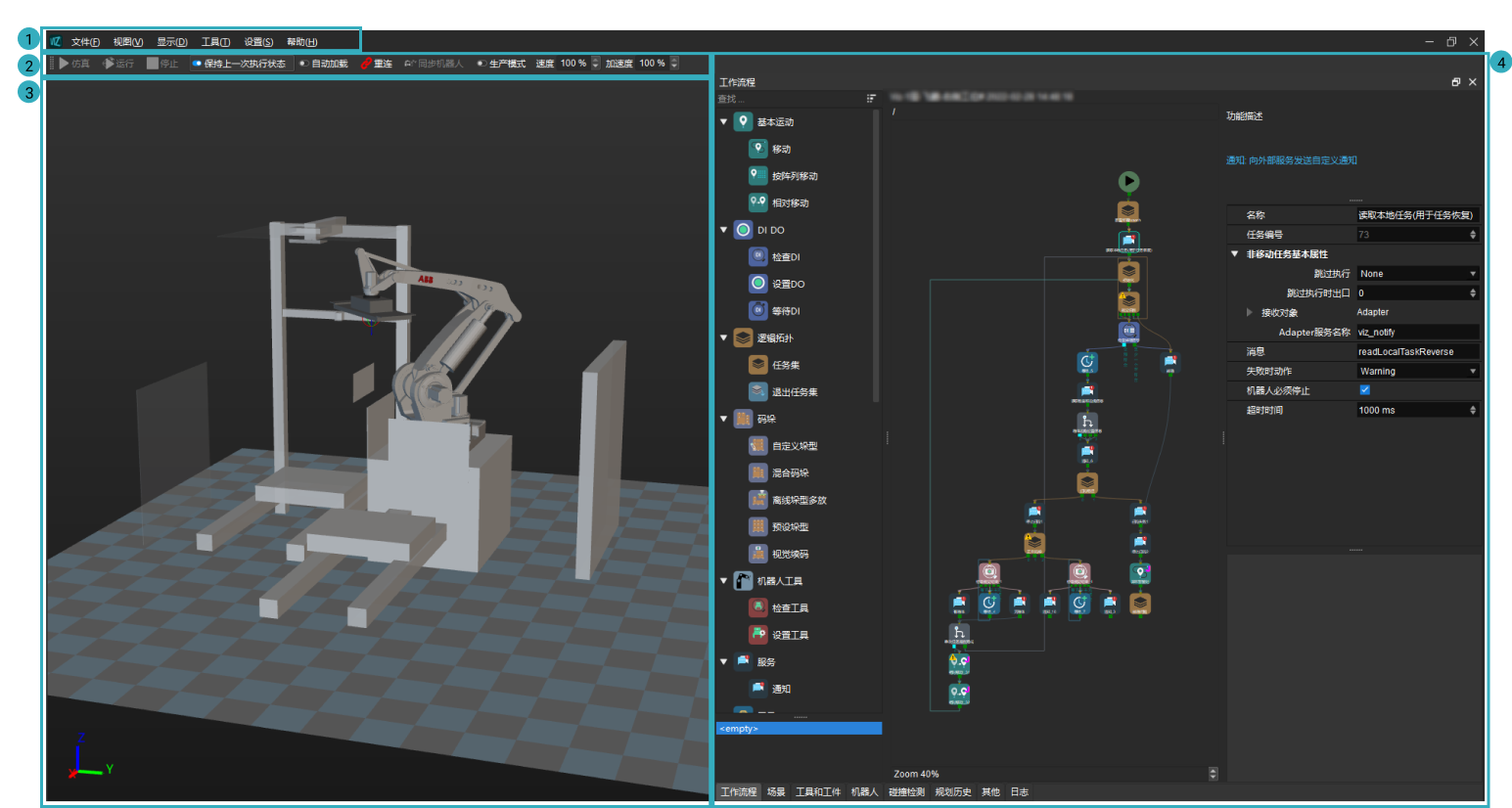
Mech-Viz 是梅卡曼德机器人自主研发的工业机器人图形化编程环境,具备机器人编程、可视化仿真、路径规划、碰撞检测、抓取规划等功能。 Mech-Viz 软件配合梅卡曼德其他系列软件共同组成梅卡曼德机器人视觉系统,实现机器人基于视觉的智能化生产。
三维仿真空间简介¶
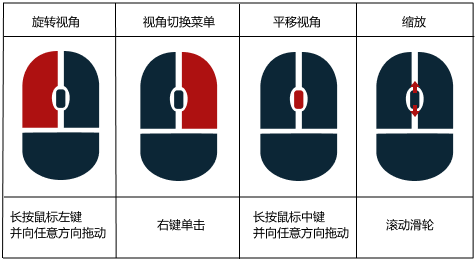
基础操作 |
|
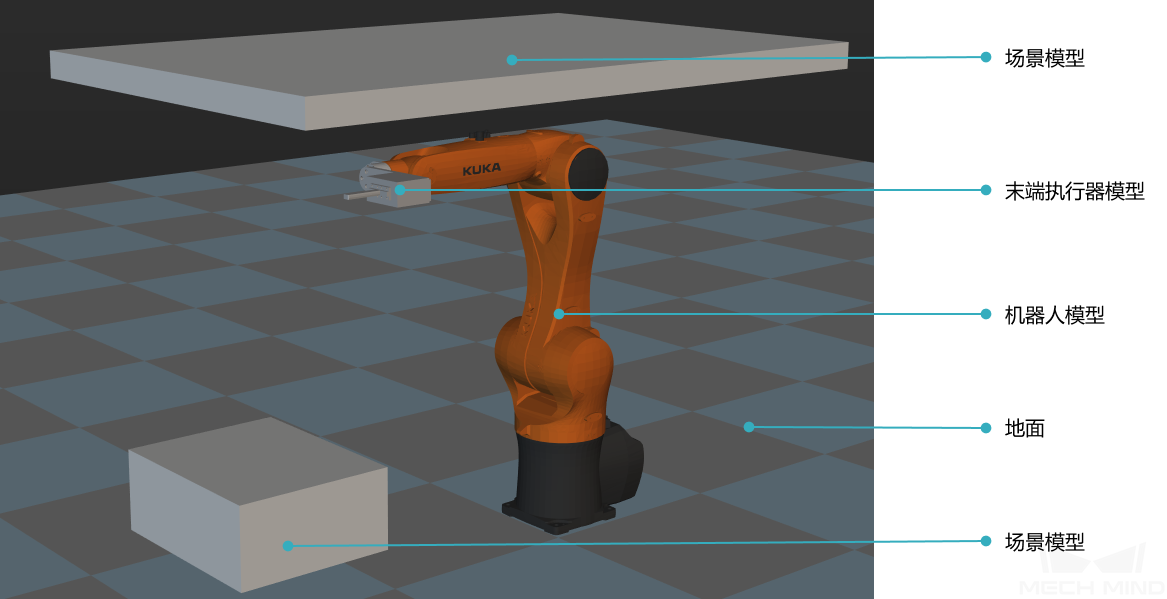
场景物体显示 |
|
|
|
运动轨迹显示 |
|
|
|
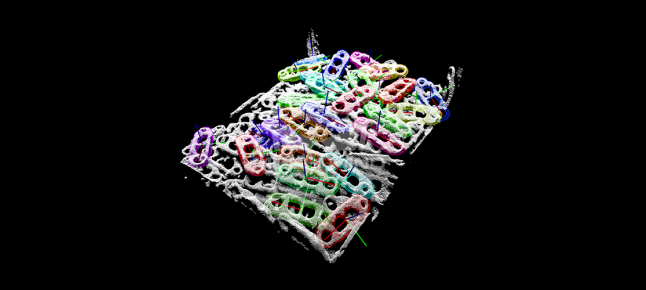
点云及抓取点显示 |
|
|
|
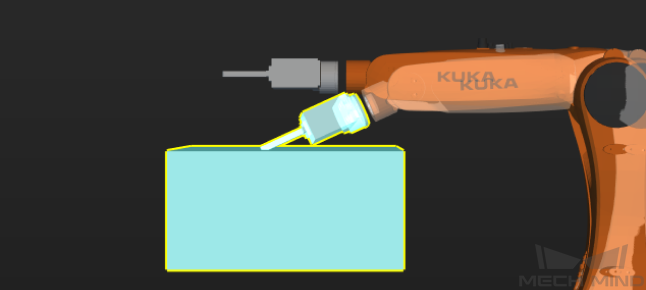
碰撞预判显示 |
|
|
Mech-Viz 是梅卡曼德机器人自主研发的工业机器人图形化编程环境,具备机器人编程、可视化仿真、路径规划、碰撞检测、抓取规划等功能。 Mech-Viz 软件配合梅卡曼德其他系列软件共同组成梅卡曼德机器人视觉系统,实现机器人基于视觉的智能化生产。
基础操作 |
|
场景物体显示 |
|
|
|
运动轨迹显示 |
|
|
|
点云及抓取点显示 |
|
|
|
碰撞预判显示 |
|
|