碰撞检测¶
在诸如工件上下料、拆码垛等应用场景中,防止机器人与料筐或其他障碍物的碰撞非常重要,这样程序才能不间断地运行。 Mech-Viz 能够通过碰撞检测功能来防止机器人在运动过程中发生不必要的碰撞, 在实际规划机器人运动路径过程中,通过在三维仿真空间高亮显示碰撞部分,并终止工程运行的方式来提醒用户发生碰撞。
碰撞检测是由各碰撞模型两两组合实现的,包含多种碰撞检测组合类型,例如点云与其他物体的碰撞、机器人与其他物体的碰撞等。 在 Mech-Viz 中可以通过碰撞表格来了解当前工程所进行的碰撞检测组合类型,表格中不同颜色代表不同的碰撞检测判断条件,如上图所示。
Mech-Viz 内的碰撞模型分类如下表所示:
类型 |
来源 |
示例 |
基本几何体 (目前仅长方体) |
|
|
Mash(三角面片) |
|
|
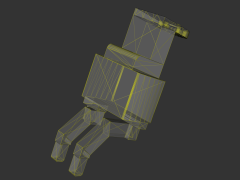
凸多面体组合体 |
|
|
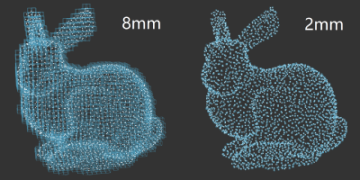
八叉树 |
|
|