机器人¶
在搭建工程时,通常从选择或导入机器人开始,机器人面板用于模拟真实机器人并操作已连接的真实机器人。本节主要包含以下内容:
在主界面的右下角,单击①处 机器人 ,进入机器人面板,如下图所示。
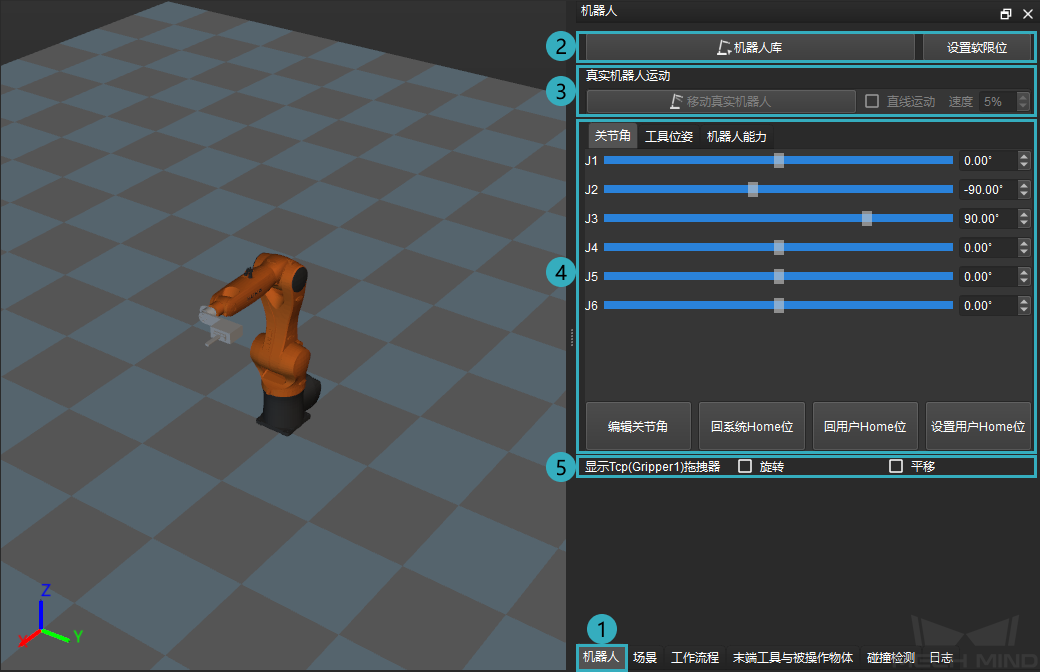
在上图中,②处 配置机器人 ;③处设置 真实机器人运动 ;④处设置 关节角 和 工具位姿 ,以及显示 机器人能力 ;⑤处设置是否 显示 TCP 拖拽器 。
配置机器人¶
单击 机器人库 后,在弹窗中可以通过选择机器人品牌和型号以导入机器人模型,如下图所示。
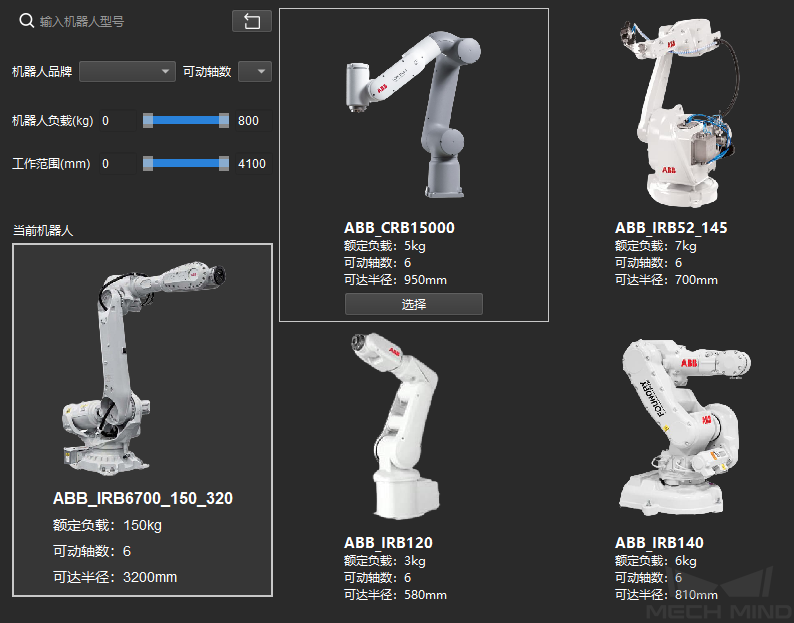
搜索框 :输入机器人品牌和型号,英文不区分大小写。单击
 按钮可以清除输入框中的内容。选择 机器人品牌 、 可动轴数 、 机器人负载 、 工作范围 也可筛选所需的机器人。
按钮可以清除输入框中的内容。选择 机器人品牌 、 可动轴数 、 机器人负载 、 工作范围 也可筛选所需的机器人。搜索结果 :将在右方显示。鼠标悬停于待选择的机器人上会显示白色边框和 选择 按钮,单击该按钮,选中的机器人便会出现在三维仿真区内。
当前机器人 :显示当前在三维仿真区内的机器人信息。
软限位是软件中设定的各轴运动范围限值。单击 设置软限位 可以为机器人的各轴设置软限位,如下图所示。
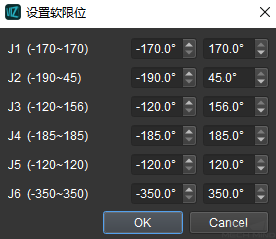
设定软限位后,与关节角相关的技能(如移动)在设置关节角时,取值范围就是此处设置的范围。
注意
此处设置的软限位是 Mech-Viz 软件内定义的软限位,仅在 Mech-Viz 软件内使用。此设定不影响机器人示教器端的软限位设置。
真实机器人运动¶
在已连接真实机器人的情况下,通过单击 移动真实机器人 可以将真实机器人移动到仿真机器人的当前关节位置,从而实现同步移动真实机器人。在 移动真实机器人 右侧还可以勾选 直线运动 并设置其 速度 。

注意
在已连接真实机器人的情况下,若需要和真实机器人同步,还需单击软件上方工具栏中的 同步机器人 。
关节角¶
关节角 选项下显示仿真机器人当前的关节角数据。若需要调整仿真机器人位姿,拖动各轴的滑块或者直接在右侧输入框中输入数值,仿真机器人将会根据调整实时移动。
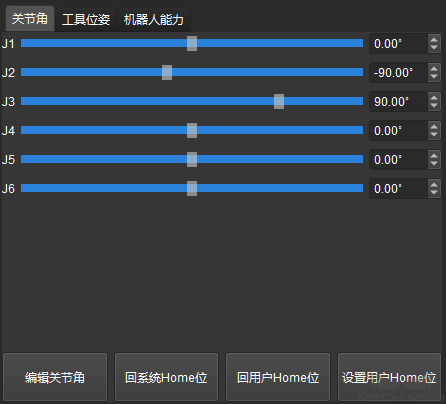
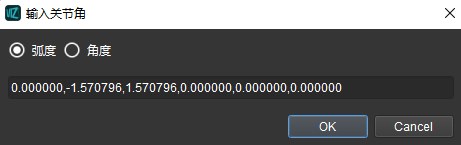
编辑关节角 :在弹窗中可以一次性输入各轴的关节角数值(单位可选弧度、角度,1°=π/180,1rad=(180/π)°)。
回系统 Home 位 :仿真机器人将回到机器人配置文件中设定的初始位置(系统默认的 Home 位)。
回用户 Home 位 :仿真机器人将回到用户自定义的初始位置,此位置通过右侧的 设置用户 Home 位 进行设置。
设置用户 Home 位 :拖动各轴的滑块或者直接在右侧输入框中输入数值,然后单击该按钮,便可将当前关节位置设置为用户自定义 Home 位。
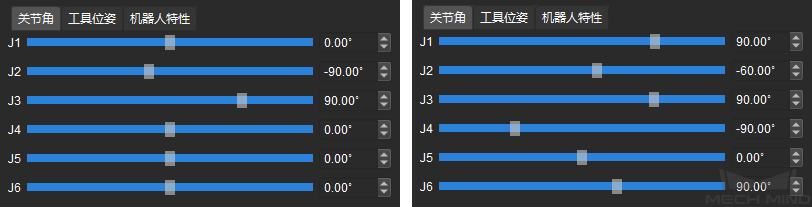
下图中左侧为调整前的参数值,右侧为调整后的参数值。
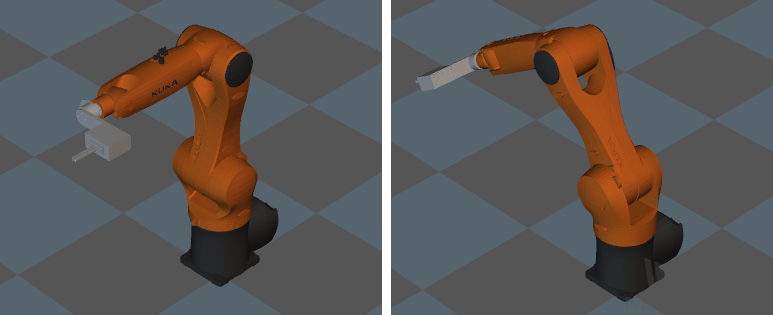
下图中左侧为调整前的仿真图,右侧为调整后的仿真图。
工具位姿¶
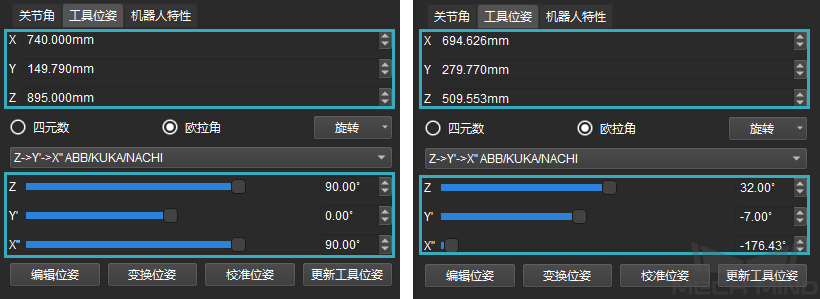
工具位姿 选项下显示仿真机器人当前的工具位姿数据。通过下方的 四元数 和 欧拉角 选项可以对工具位姿进行调整,也可通过 编辑位姿 直接输入工具位姿。
下图中左侧为调整前的参数值,右侧为调整后的参数值。
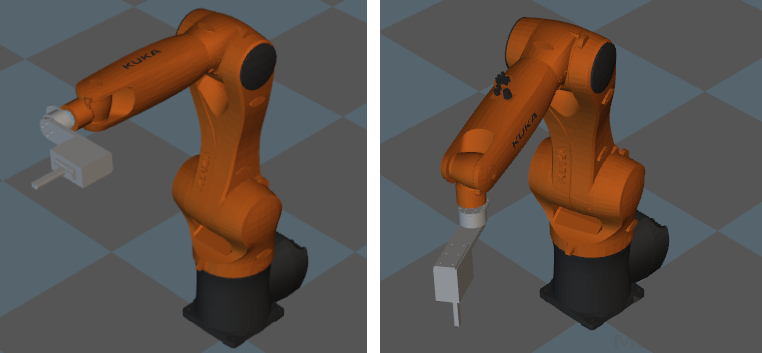
下图中左侧为调整前的仿真图,右侧为调整后的仿真图。
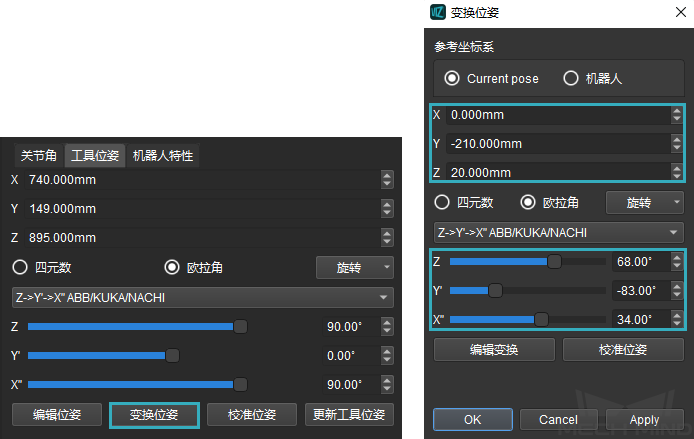
变换位姿 :通过定义变换的方式将当前位姿变换到新位姿。首先需要选择参考坐标系,然后通过 XYZ 坐标、四元数、欧拉角或 编辑变换 定义变换,仿真机器人会实时显示变换结果。若需要保存变换结果,请单击 Apply ,再单击 OK ;若不需要保存变换结果,请单击 Cancel 退出,仿真机器人将回到原位。
下图中左侧为工具调整前的位姿,右侧为相对当前位姿调整参数值。
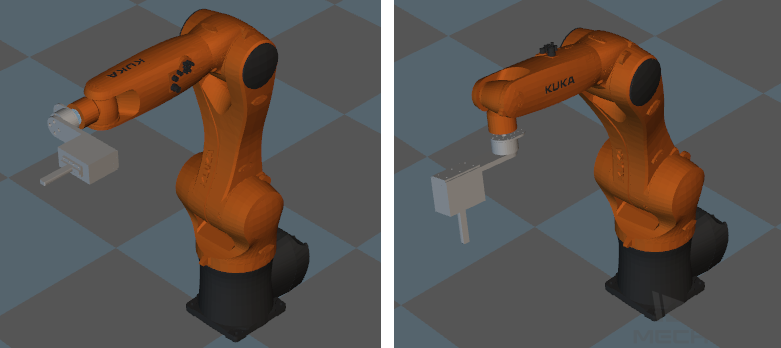
下图中左侧为调整前的仿真图,右侧为调整后的仿真图。
校准位姿 :设置 P1、P2 和 P3 点的坐标并运用三点校准法对工具位姿进行校准。

更新工具位姿 : 在已连接真实机器人的情况下,Mech-Viz 将从真实机器人获取工具位姿。

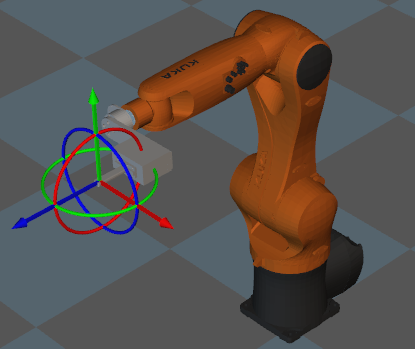
显示 TCP 拖拽器¶
此选项指仿真机器人上末端执行器的拖拽器。若勾选 旋转 和 平移 选项,用户可以按住 ctrl 键,同时使用鼠标左键选中拖拽器的某个平移轴或旋转轴进行拖拽,从而直观地调整工具位姿。