场景¶
在使用 Mech-Viz 进行机器人路径规划时,场景中仅有一个机器人通常无法满足实际需求。一方面,与机器人相关的设备(如相机、底座等)需要添加到场景中;另一方面,操作物体的放置环境(如桌面、抓取筐等)也需要添加到场景中。因此,在场景中添加物体模型对路径规划、碰撞检测、抓取规划等操作至关重要。本节主要包含以下内容:
场景面板的功能主要是构建整个机器人工作的场景,包括工作台、工作空间等。在主界面的右下角,单击①处 场景 ,进入场景面板,如下图所示。
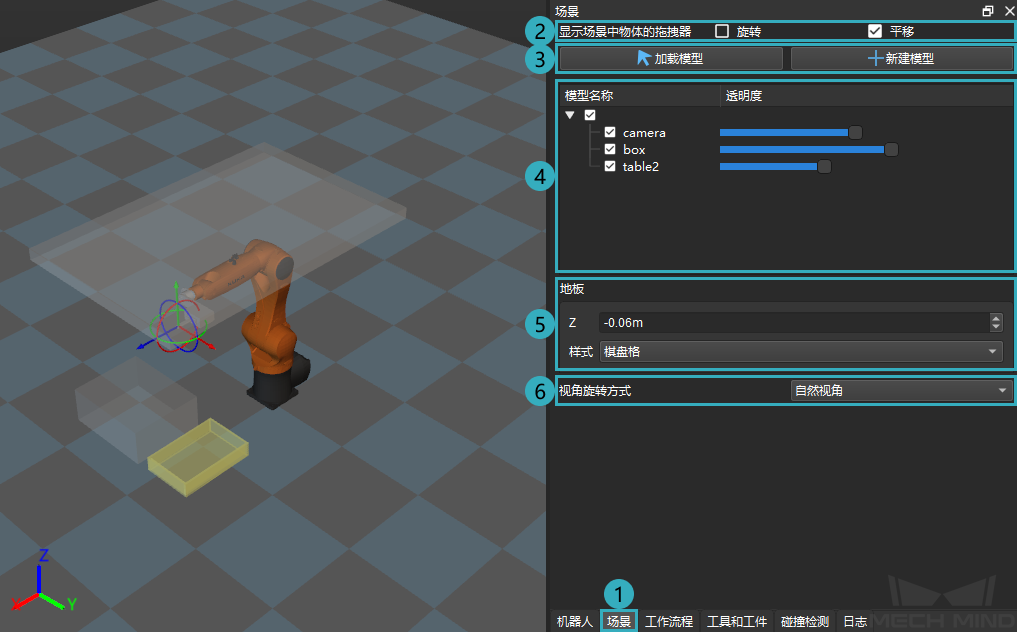
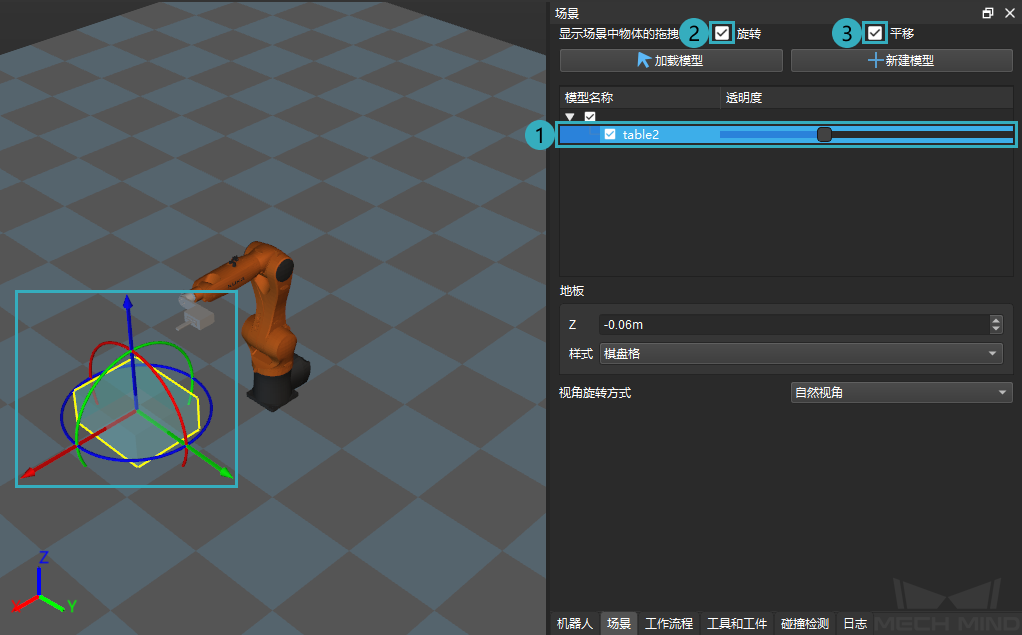
在上图中,②处设置 显示场景中物体的拖拽器 ,③处 新建、加载模型 ,④处为与模型操作相关的选项( 复制、粘贴、删除、重命名模型 、 编辑模型 、 设置模型透明度 ),⑤处 设置地板高度与样式 ,⑥处 设置视角旋转方式 。
新建、加载模型¶
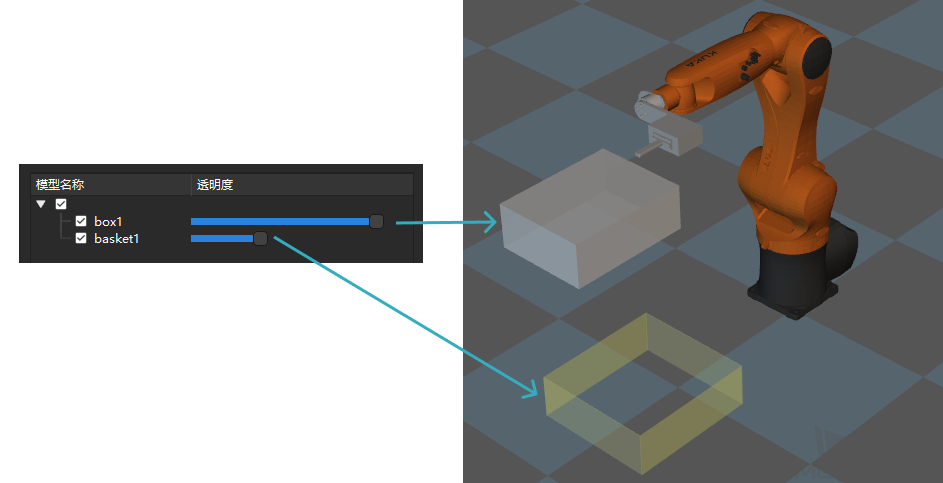
在向场景中添加新模型时,单击 新建模型 ,在弹出的窗口中,设置物体的名称、类型、长宽高等。
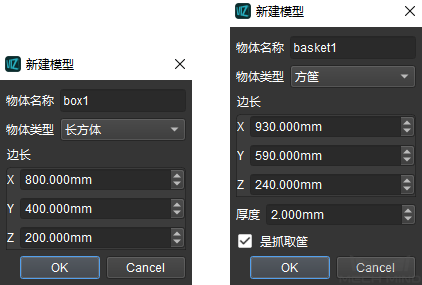
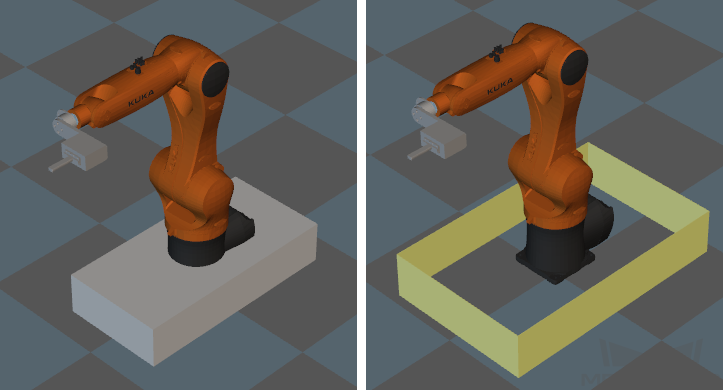
上图左侧创建长方体box1,右侧创建方筐basket1,对应的三维仿真图如下,灰色实心表示box1,黄色空心表示basket1。
注意
在 物体类型 选项中,长方体表示模型为实心,方筐表示为模型为空心。
物体类型选择方筐后,若勾选 是抓取筐 ,则抓取筐与方筐的外形颜色不同。
创建模型时无法修改模型位置,创建模型后可以在 物体位姿 处修改。
若需要复用其他工程中的模型时,单击 加载模型 以加载已有的物体模型 (支持 STL、OBJ、DAE 等文件格式)。在弹出的窗口中,选中相应文件,单击 打开 。
注意
在加载模型后有可能会出现模型比原本场景大的情况,这是由于米与毫米的单位转换,此时只需要双击该模型,在 模型仿射 中将模型比例改为0.001。
复制、粘贴、删除、重命名模型¶
在向场景中添加或新建模型后,用户可以通过单击鼠标右键对其进行复制、粘贴、删除和重命名操作。
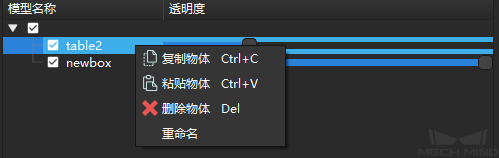
小技巧
使用快捷键也可实现复制(ctrl + C)、粘贴(ctrl + V)、删除(Del)、多选(ctrl)、撤销(ctrl + Z)、恢复(ctrl + Y)操作。
子类跟随父类一同复制粘贴。
复制后单击空白位置取消选中任何模型,粘贴后的模型出现在根目录。
被复制后的所有模型名称后面加 -1 -2 -3 -4 ……,并以当前 - 后最大数字为基数向后增加。
编辑模型¶
在向场景中添加或新建模型后,用户有时需要对其位姿或大小进行调整,此时可以双击模型,便可打开编辑模型窗口。
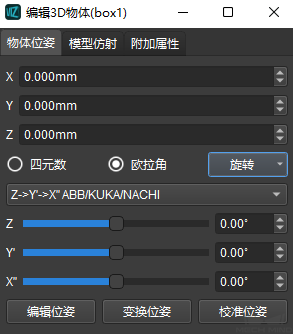
物体位姿¶
在 物体位姿 选项卡下,设置物体在空间的位姿。
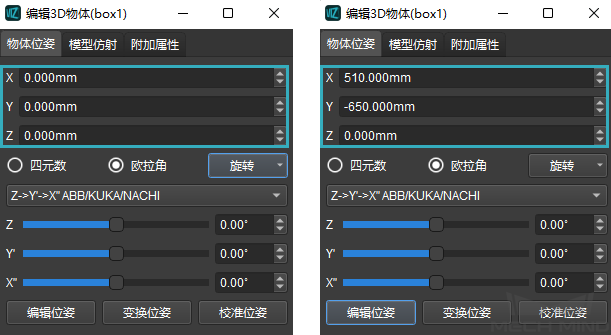
X 、 Y、 Z :调整物体相对于机器人的位置。
下图中左侧为调整前的参数值,右侧为调整后的参数值。
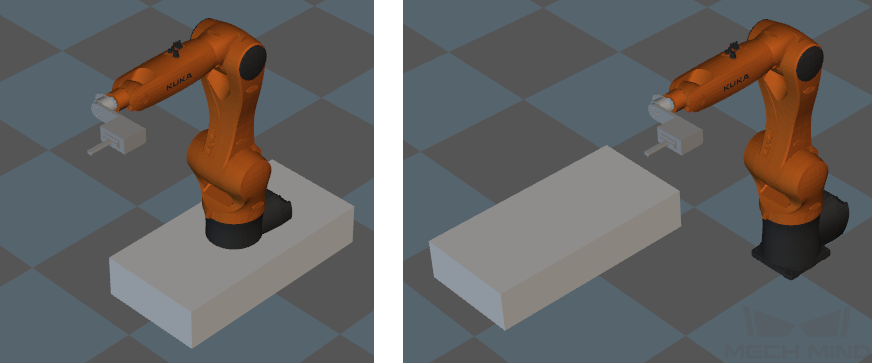
下图中左侧为调整前的仿真图,右侧为调整后的仿真图。
四元数 或 欧拉角 :调整物体相对于机器人的姿态。使用欧拉角时,注意在下拉选项中,选取旋转轴的顺序。
下图中左侧为调整前的参数值,右侧为调整后的参数值。
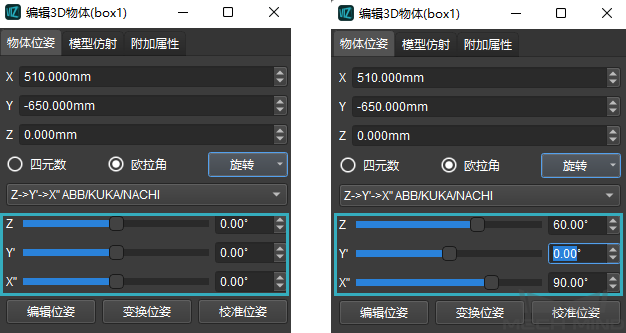
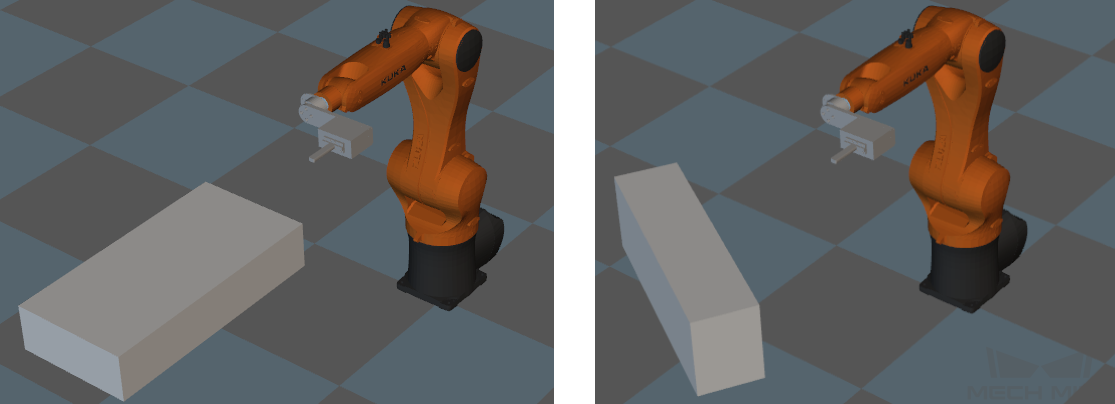
下图中左侧为调整前的仿真图,右侧为调整后的仿真图。
旋转 :包含自动对齐 、编辑旋转(设置四元数)、绕 X 轴顺时针旋转90°、绕 Y 轴顺时针旋转90°、绕 Z 轴顺时针旋转90°、绕 X 轴逆时针旋转90°、绕 Y 轴逆时针旋转90°、绕 Z 轴逆时针旋转90°。
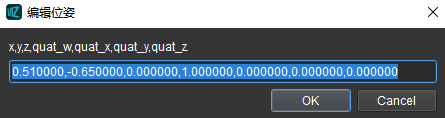
编辑位姿 :直接对 X、Y、Z 值以及四元数进行设置。注意此处 X、Y、Z 值的单位为米。
变换位姿 :设置 X、Y、Z 值以及四元数或欧拉角将当前位姿变换到新位姿。变换位姿可以以当前位姿为基准重建坐标系,对于调整比较复杂的位姿非常方便。
下图中左侧为物体调整前的位姿,右侧为相对当前位姿调整参数值。

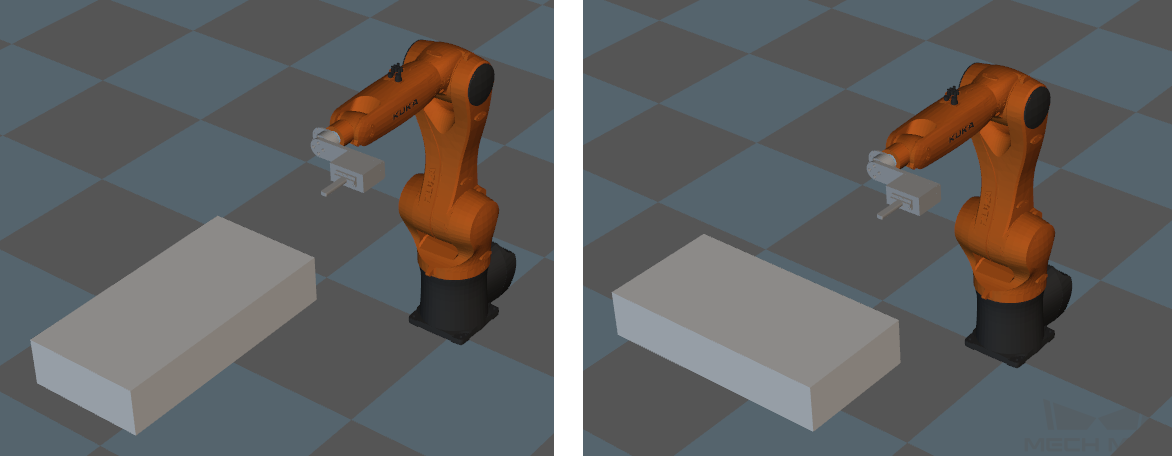
下图中左侧为调整前的仿真图,右侧为调整后的仿真图。
校准位姿 通过设置 P1、P2 和 P3 点的坐标并运用三点校准法对物体位姿进行校准。
模型仿射¶
在 模型仿射 选项卡下,通过设置物体位姿从而对模型进行仿射变换。
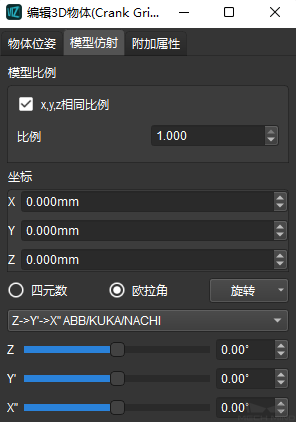
其中,模型比例可以根据需求使用x、y、z同比例或分别设置x、y、z比例,其余选项的使用方法参考物体位姿选项卡的相同选项。
注意
使用 加载模型 ,才可对物体进行仿射变换。使用 新建模型 ,该选项默认不可进行设置操作。
设置地板高度与样式¶
地板 选项可以设置地板在场景中的上下位置和样式,如下图所示。
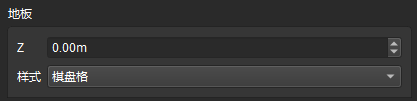
Z :设置该值即可调整地板高度,可正可负。
样式 : 提供 棋盘格 、 网格 和 无 三种格式,建议选择前两种样式。
设置视角旋转方式¶
视角旋转方式 提供自然视角和自由视角两种选项。 自然视角 和 自由视角 都可以通过鼠标左键拖动旋转场景,其视角都永远朝向坐标原点。自然视角绕 X 轴 或 Y 轴最大可以旋转 180°,绕 Z 轴最大可以旋转 360°。自由视角绕 X 轴、Y 轴或 Z 轴最大可以旋转 360°。


在上图中,左侧为自然视角下的场景,右侧为自由视角下的场景,左侧场景无法通过旋转处于右侧场景的状态。