目标类型¶
工具位姿:运动点信息将以工具坐标系的X、Y、Z值以及欧拉角或四元数进行表示。
关节角:运动点信息将以机器人每个关节的数值表示。
物体位姿:运动点信息将以物体坐标系的X、Y、Z值以及欧拉角或四元数进行表示。
选择目标类型的判断方式如 图1所示。

图1 移动目标类型设置判断方式¶
提示
点击对应按钮可进入弹窗中进行相关设置。
工具&物体位姿调整快捷操作:
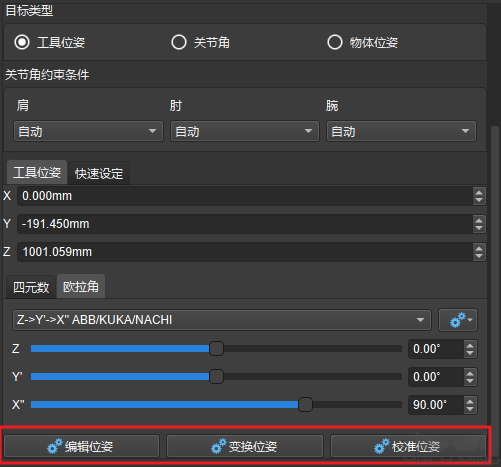
编辑位姿: 直接编辑位姿,可复制和粘贴,xyz+四元数7组数据;
变换位姿: 调整机器人位姿,可选择机器人当前位姿或机器人默认位姿的坐标系下调整,适用于微调位姿的场景;
校准位姿: 用法类似ABB机器人三点法计算工件坐标系,适用于物体旋转姿态不好确定的场景;比如长方体倾斜时,旋转位姿很难确定,可使用校准位姿计算出长方体旋转姿态,让机器人按照计算出的姿态运行。
关节角调整快捷操作:
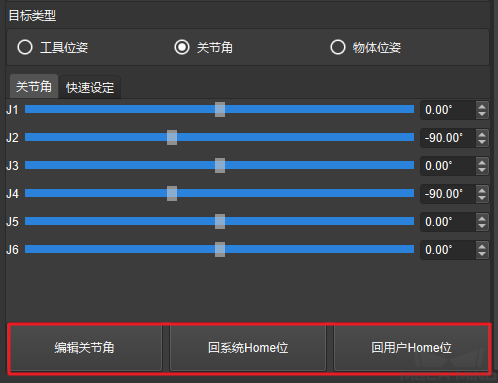
编辑关节角: 与编辑位姿用法类似,可复制和粘贴,数据分为弧度和角度两种格式,可根据情况切换;
回系统Home位: 系统Home位是机器人零点,如果想让移动的目标点快速回到机器人零点,可使用此功能;
回用户Home位: 用户设定的Home位,需要在 选项里设定用户Home位,如果想让移动的目标点快速回到设定Home位,可使用此功能;如果未设定用户Home位,用户Home位与系统Home位一致。
快速设定

移动仿真机器人: 将仿真机器人模型移动到当前机器人目标位置,即机器人模型由位置1调整到位置2显示,仅仅是改变了仿真机器人模型的显示位置;
设定目标: 将移动的目标调整到仿真机器人模型的位置,即移动目标点由1调整到2,仿真机器人显示位置不变,移动的目标点发生改变;
显示所有解: 显示当前移动目标点所有的解,最多可有8个解,此处可以显示前面介绍的解系中的所有解,移动当前的目标点就是解系中的最优解。
