开始你的第一个应用
软件使用指南
机器人通讯配置指南
应用指南
附录
功能描述
基于已知运动点的相对移动。
参数说明
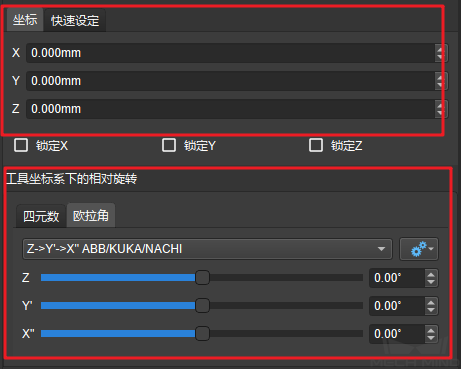
图1 参数说明¶
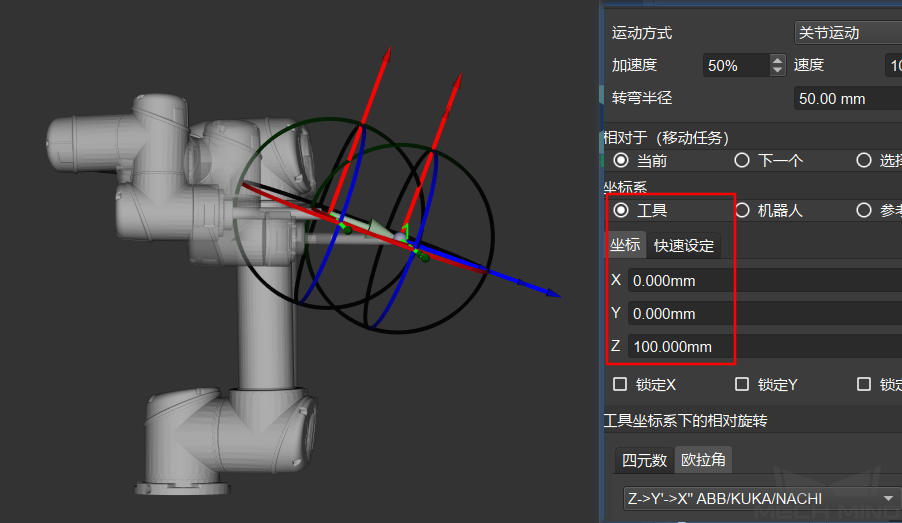
图2 工具偏移¶
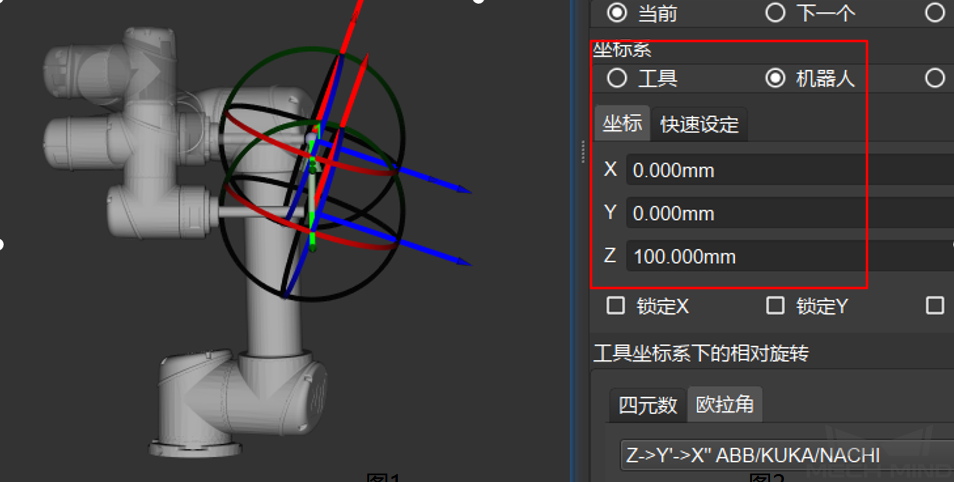
图3 机器人偏移¶
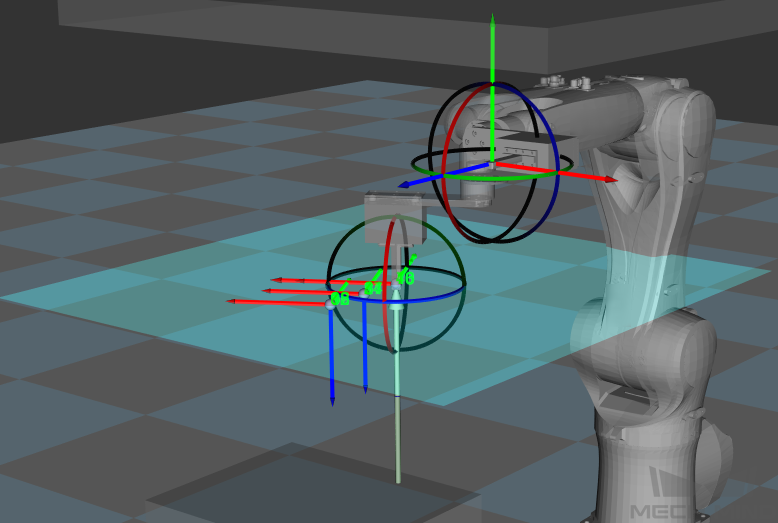
图4 Z向绝对高度¶
图5 移动距离¶
图6 锁定Z¶