入门教程:轮廓测量仪(一体式)
本章将引导你完成从开箱检查到使用Mech-Eye Viewer获取数据的一系列操作。
1. 开箱检查
-
收到包装后,请确认包装完好无破损。
-
找到包装内的《包装清单》,并参照该清单检查物品和配件,确认物品和配件无缺失或损坏。
| 以下列表仅供参考,请以包装内的《包装清单》为准。 |
轮廓测量仪 |
|
|---|---|
配件袋 |
|
使用说明书 |
|
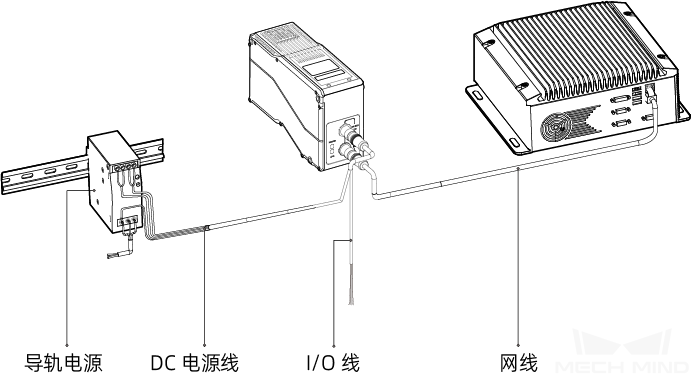
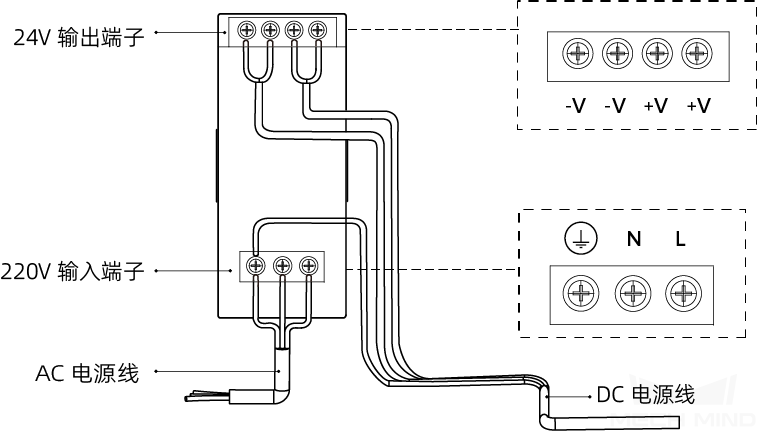
导轨电源 |
|
DC 电源 & I/O 线 |
|
网线 |
|
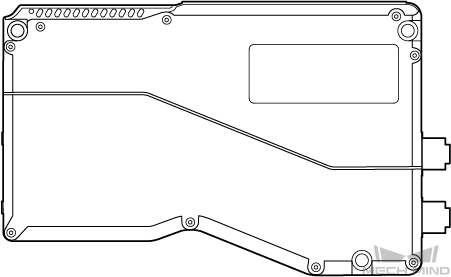

2. 确认接口及指示灯
请对照以下图片及表格,确认轮廓测量仪上各接口及指示灯的功能。
| 图示仅供参考,请以实物为准。 |
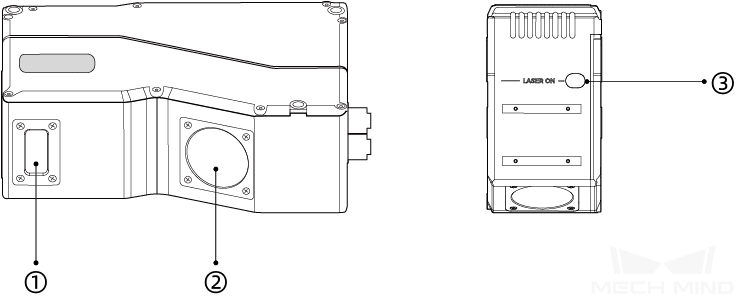
| 序号 | 名称 | 功能 |
|---|---|---|
① |
激光发射器 |
激光发射中 |
② |
感光单元 |
接收目标表面反射的激光线 |
③ |
LASER ON指示灯 |
熄灭:激光未发射 |
常亮:激光发射 |

| 序号 | 名称 | 功能 | |
|---|---|---|---|
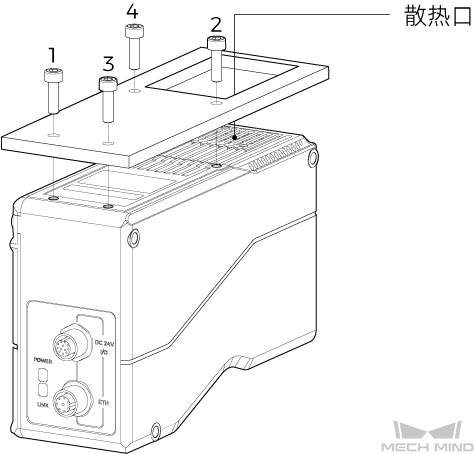
④ |
散热口 |
通过内置风扇散热 |
|
⑤ |
POWER指示灯 |
熄灭:未接通电源 |
|
绿灯常亮:电压正常 |
|||
黄灯常亮:电压异常 |
|||
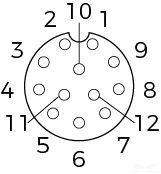
⑥ |
电源&I/O接口
|
1 |
+V (24V DC) |
2 |
+V (24V DC) |
||
3 |
-V (0V DC) |
||
4 |
-V (0V DC) |
||
5 |
Encoder_A+ |
||
6 |
Encoder_A- |
||
7 |
Encoder_B+ |
||
8 |
Encoder_B- |
||
9 |
Encoder_Z+ |
||
10 |
Encoder_Z- |
||
11 |
Trigger_IN |
||
12 |
Trigger_COM |
||
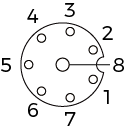
⑦ |
ETH网口
|
1 |
Ethernet MX1+ |
2 |
Ethernet MX1- |
||
3 |
Ethernet MX2+ |
||
4 |
Ethernet MX2- |
||
5 |
Ethernet MX3+ |
||
6 |
Ethernet MX3- |
||
7 |
Ethernet MX4+ |
||
8 |
Ethernet MX4- |
||
⑧ |
LINK指示灯 |
熄灭:网络未连接 |
|
闪烁:数据传输中 |
|||
长亮:无数据传输 |
|||
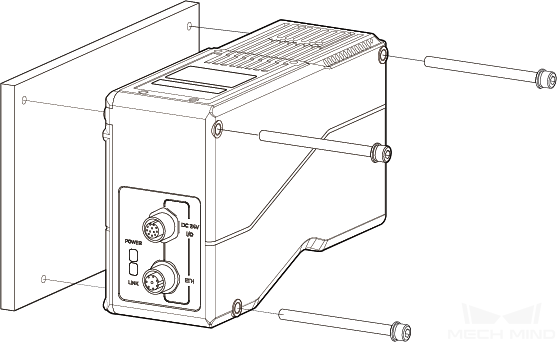
3. 安装轮廓测量仪
3.1. 安装注意事项
-
目标物体形状复杂时,测量范围可能会产生死角。如需扫描形状复杂的物体,请参考安装注意事项确认是否会产生死角。
-
确认安装位置是否可能遮挡感光单元接收线激光。
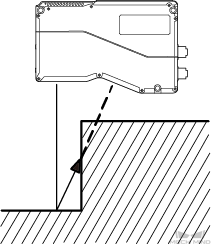
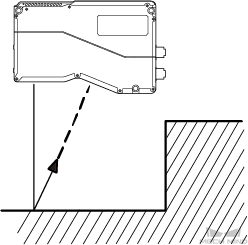
错误
正确
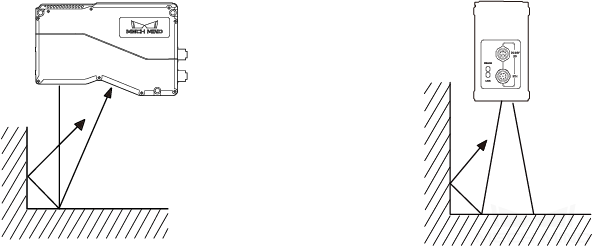
-
激光反射到墙面上后,会变为杂散光。确认杂散光对测量是否有影响,再进行安装。
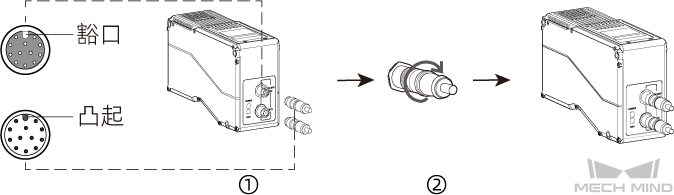
4. 连接线缆
5. 下载并安装Mech-Eye SDK
你可以从梅卡曼德在线社区下载Mech-Eye SDK安装文件。
双击exe格式的安装文件即可安装Mech-Eye SDK。
6. 设置IP地址
连接轮廓测量仪前,需确保以下两个IP地址唯一,且在同一网段。
-
轮廓测量仪IP地址
-
与轮廓测量仪相连的电脑网口的IP地址
设置IP地址:
-
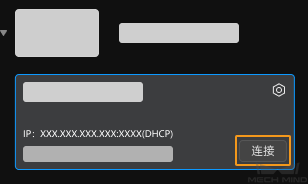
更改轮廓测量仪IP设置:打开Mech-Eye Viewer,选择待连接的轮廓测量仪,单击
 ,设置轮廓测量仪IP地址。
,设置轮廓测量仪IP地址。
轮廓测量仪出厂时的默认IP设置如下:
DHCP |
禁用 |
|---|---|
IP地址 |
192.168.23.203 |
子网掩码 |
255.255.255.0 |
网关 |
0.0.0.0 |
8. 获取数据并调节参数
轮廓测量仪通过一行行扫描获取数据,每行数据通过提取生成轮廓线。最后拼接多行轮廓线以生成强度图、深度图和点云。
调节轮廓测量仪的参数时,需先调节轮廓线的相关参数,以获取理想的轮廓线,再调节图像和点云的相关参数。
Mech-Eye Viewer提供两种模式:
-
轮廓模式:调节轮廓线相关的参数,以获取理想的轮廓线。
-
扫描模式:调节图像和点云相关的参数,以获取理想的图像与点云数据。
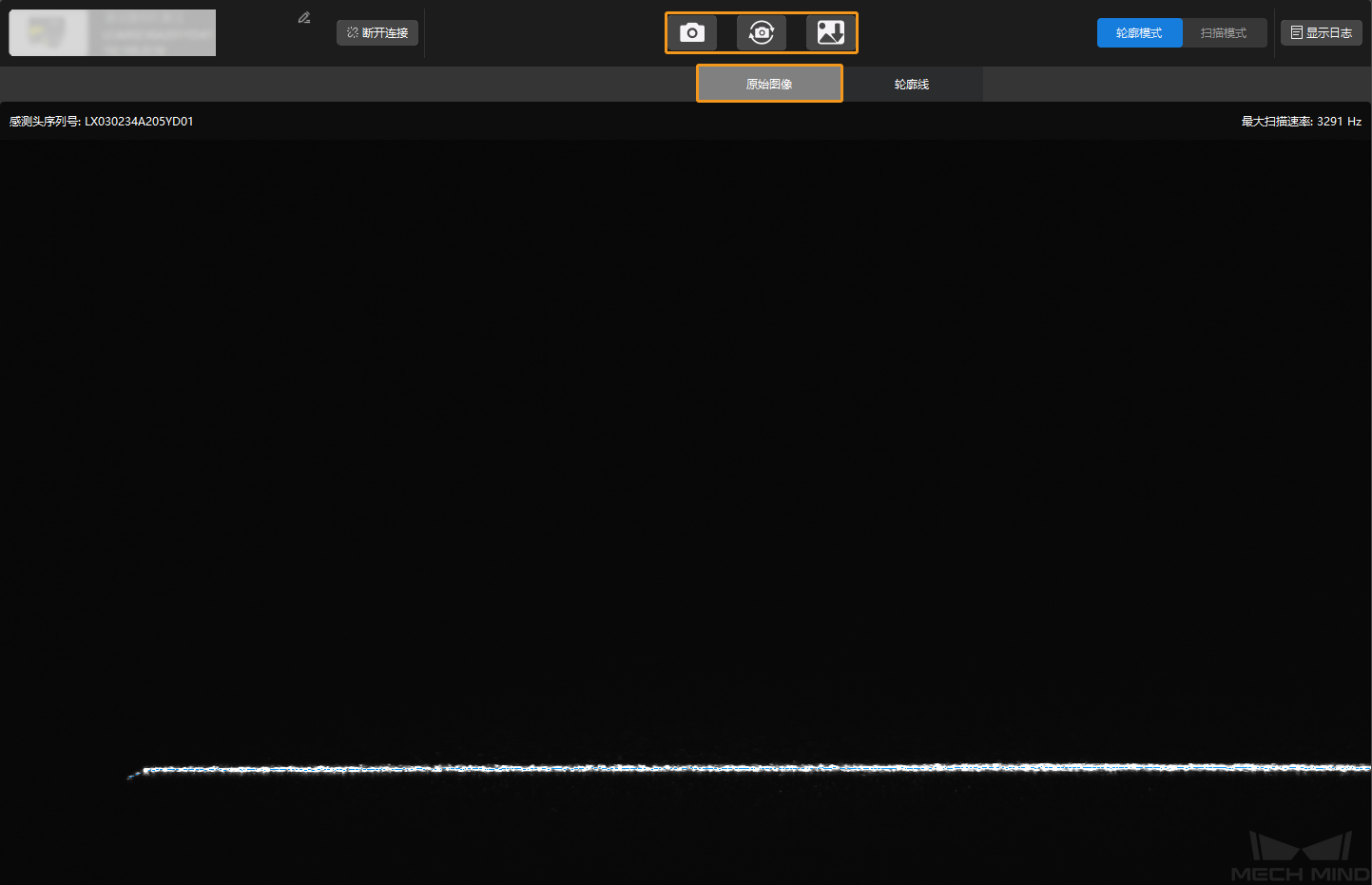
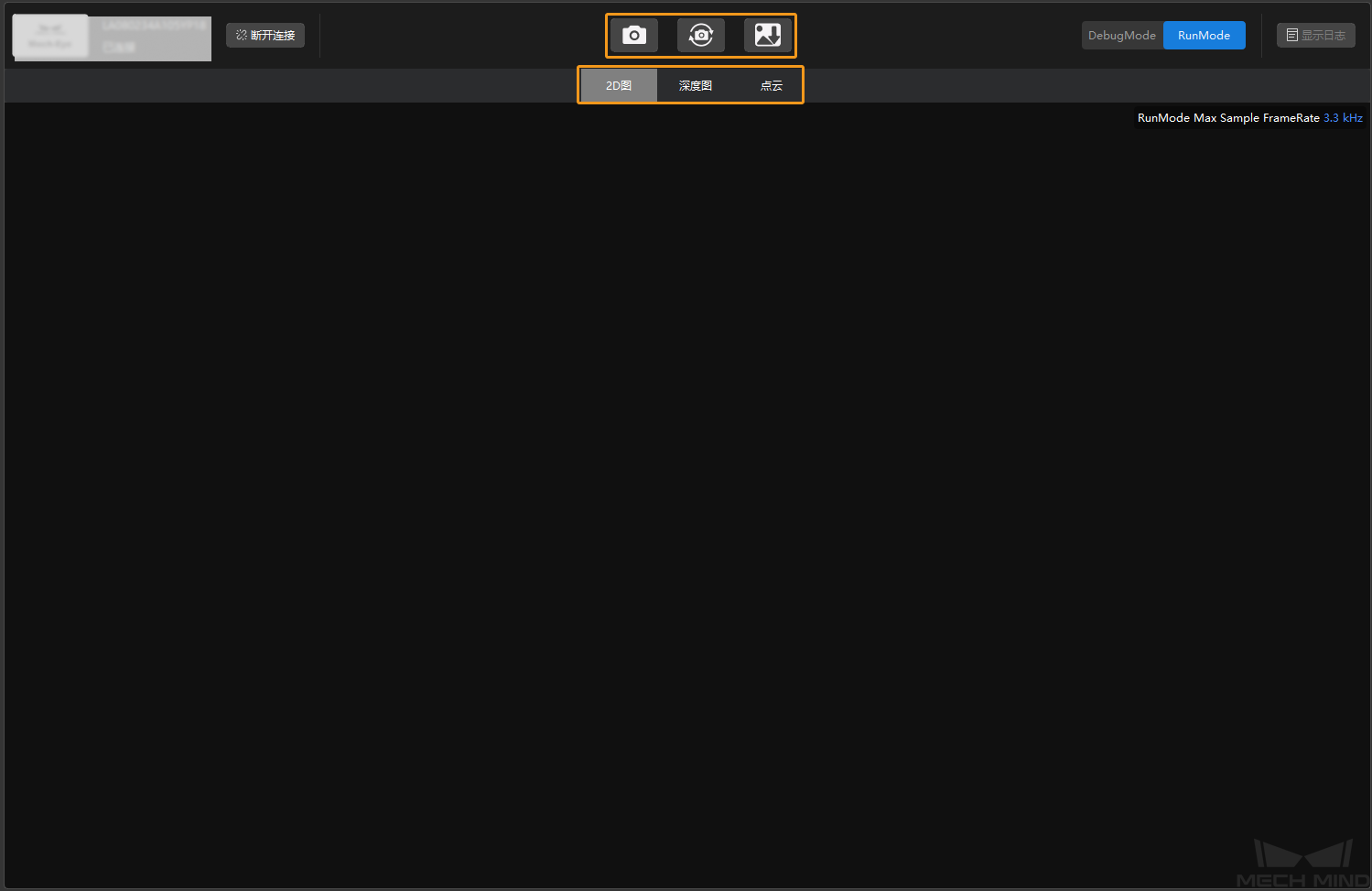
8.2. 获取原始图像
在相机查看器界面中,单击![]() ,采集一次原始图像。
,采集一次原始图像。
|
单击 |
单击采集按钮下方的数据类型,即可在原始图像与轮廓线之间进行切换。
-
原始图像用于调节激光线的亮度。
-
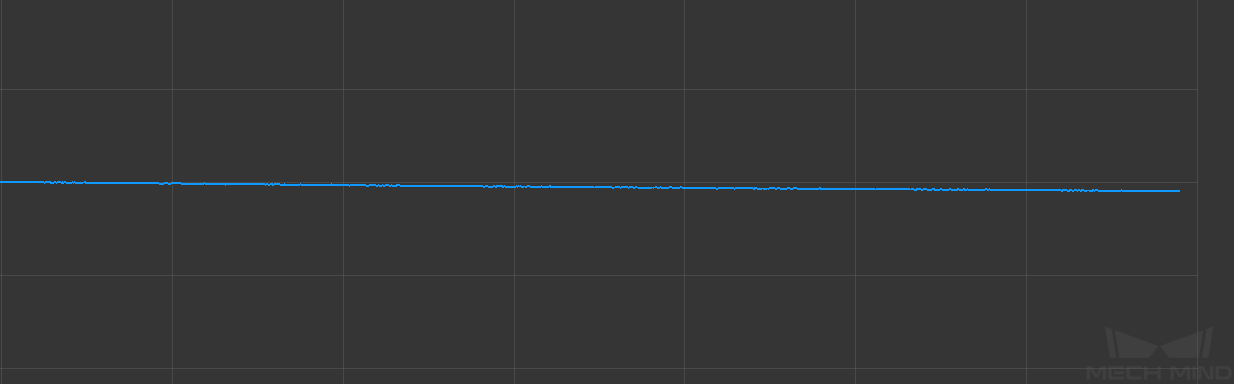
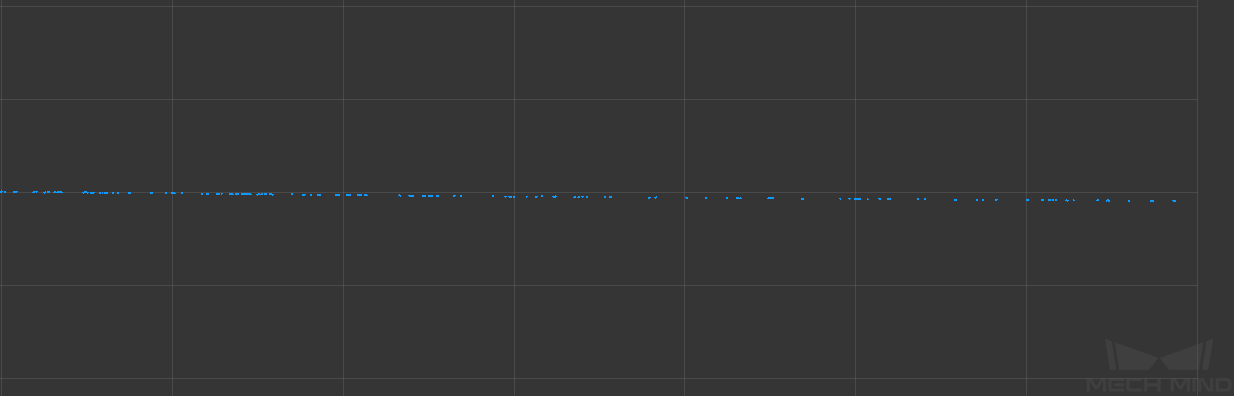
轮廓线用于查看所提取的轮廓线的深度值是否符合实际。
8.3. 调节原始图像
原始图像每列像素中提取一个点,即为提取点;提取点组成的线即为轮廓线。
为获取符合要求的轮廓线,需先获取原始图像并提升其质量。请在软件最右侧的参数区中调节相关参数,以提升原始图像的质量。
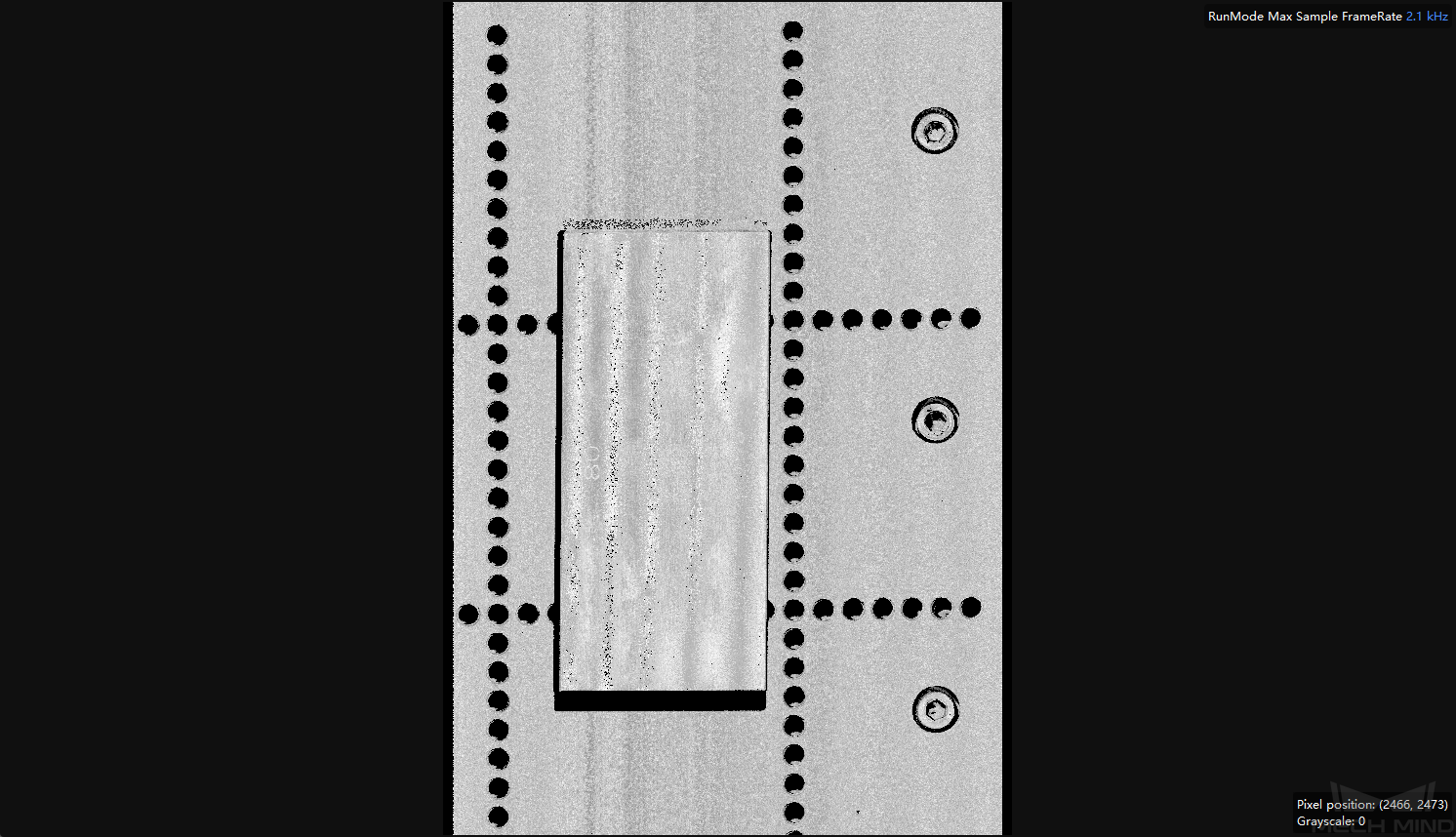
8.3.1. 判断原始图像质量
每次采集原始图像后,都需判断原始图像中的激光线是否符合要求,可参考下表进行判断。如原始图像质量不符合要求,请查看下文并调节参数。
过暗 |
|
|---|---|
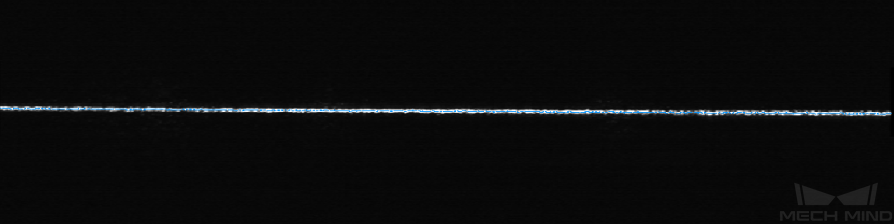
合适 |
|
过曝 |
|
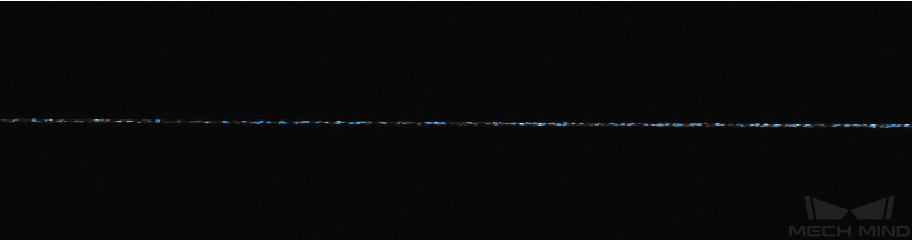
| 理想提取点的灰度值在200~255之间。在原始图像的右下角,可查看所选像素的灰度值。如原始图像右下角不可查看灰度值,请选择,勾选后即可查看。 |
8.3.2. 提升原始图像质量
金属块为单一材质的物体,因此拍摄设置下的曝光模式选择Timed。此时,调节曝光时间即可调节原始图像中激光线的亮度。
-
采集图像,查看原始图像中激光线的亮度。
-
根据激光线亮度,调节曝光时间。
-
如激光线过暗,请将曝光时间调大。
-
如激光线过曝,请将曝光时间调小。
-
-
重复步骤1和2,直至激光线亮度符合要求。
| 如被拍摄物体包含多种材质或多种颜色,可使用HDR曝光模式。更多信息请参考曝光模式。 |
8.3.4. 提升轮廓测量仪采集速度
设置Z向感兴趣区域可以减少需要处理的数据量,有效提升轮廓测量仪的采集速度。
Z向感兴趣区域位于原始图像的中心。如下图所示,黑色区域代表感兴趣区域。
| 1 | 1/2 | 1/4 |
|---|---|---|
|
|
|

调节Z向感兴趣区域:
-
将拍摄设置下的Z向感兴趣区域设置为1/4。
-
单击
 ,再单击采集按钮下方的原始图像,查看原始图像。
,再单击采集按钮下方的原始图像,查看原始图像。-
如数据丢失,请增加Z向感兴趣区域的范围;
-
如激光线在原始图像中所占的比例仍旧较小,可继续减小感兴趣区域的范围。
-
|
| 被拍摄物体颜色类型多样或材质复杂,易产生多重反射时,需调节更多参数。参见轮廓模式下参数说明。 |
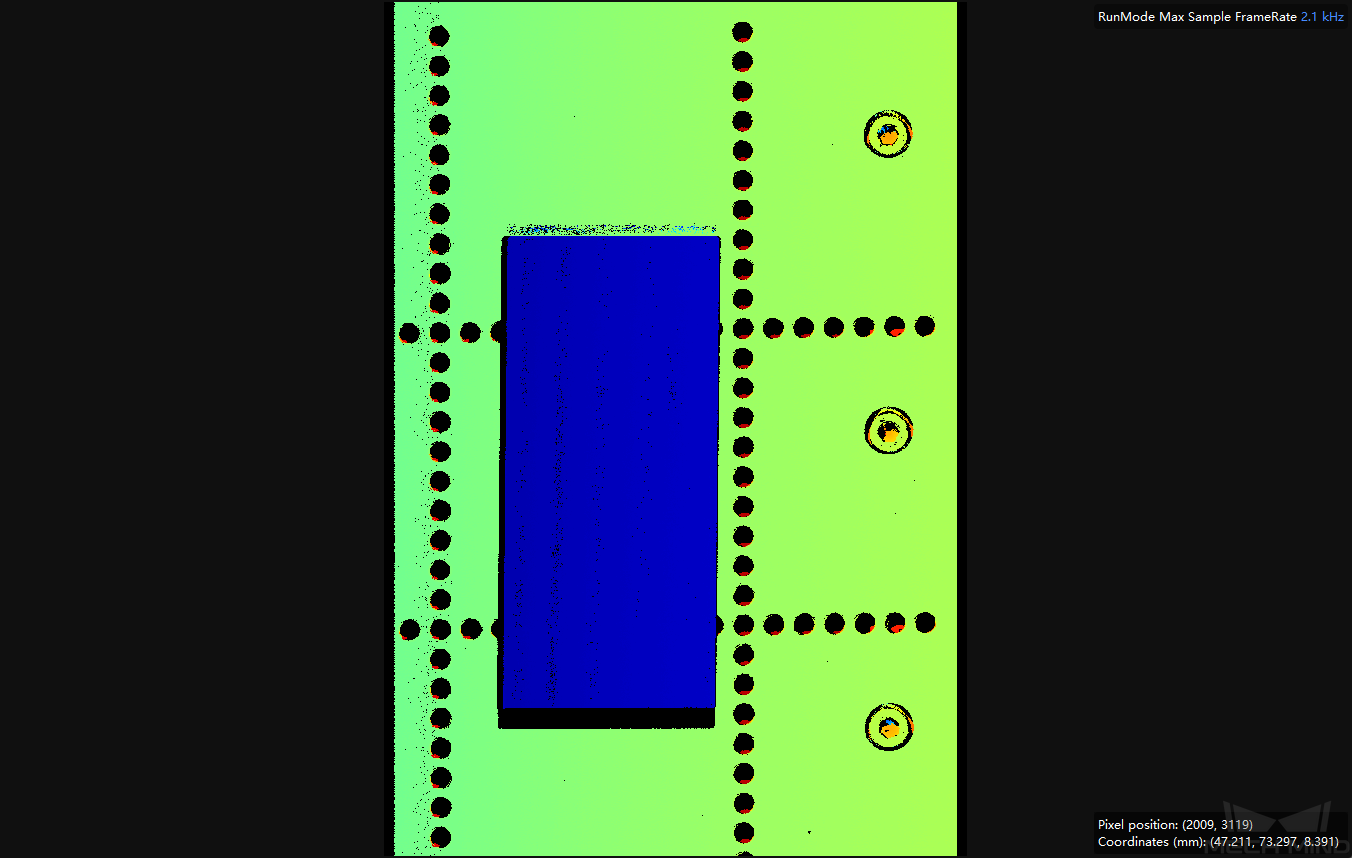
8.4. 获取图像/点云
轮廓模式获取的轮廓线是生成强度图、深度图或点云的前提。请再次确认轮廓线能满足需求后,再开始获取强度图、深度图或点云。
在相机查看器界面中,单击扫描模式按钮切换至扫描模式。单击![]() ,轮廓测量仪根据设置的扫描行数采集,并生成一张图像。采集完成后停止。
,轮廓测量仪根据设置的扫描行数采集,并生成一张图像。采集完成后停止。
|
单击 |
单击采集按钮下方的数据类型,即可在强度图、深度图与点云之间进行切换。
更多关于采集数据和数据类型的信息,详见采集与查看数据。
8.5. 调节图像/点云
8.5.2. 调节参数
在由编码器触发扫描,且运动平台为顺时针单向运动的场景下,至少需调节以下参数。
-
轮廓测量仪与编码器一起使用时,请将触发模式下的行扫描触发源设置为编码器。
-
设置编码器相关参数。
-
由于运动平台顺时针单向运动,因此将编码器触发模式设置为PositionUp,触发方向设置为Channel A Leading。
-
触发信号计数模式使用默认值1×。
-
触发间隔使用6。
触发间隔影响获取图像/点云的长宽比,此场景不考虑长宽比。如需保证图像/点云的长宽比与实际物体一致,请参考如何调节Y轴分辨率。
-
-
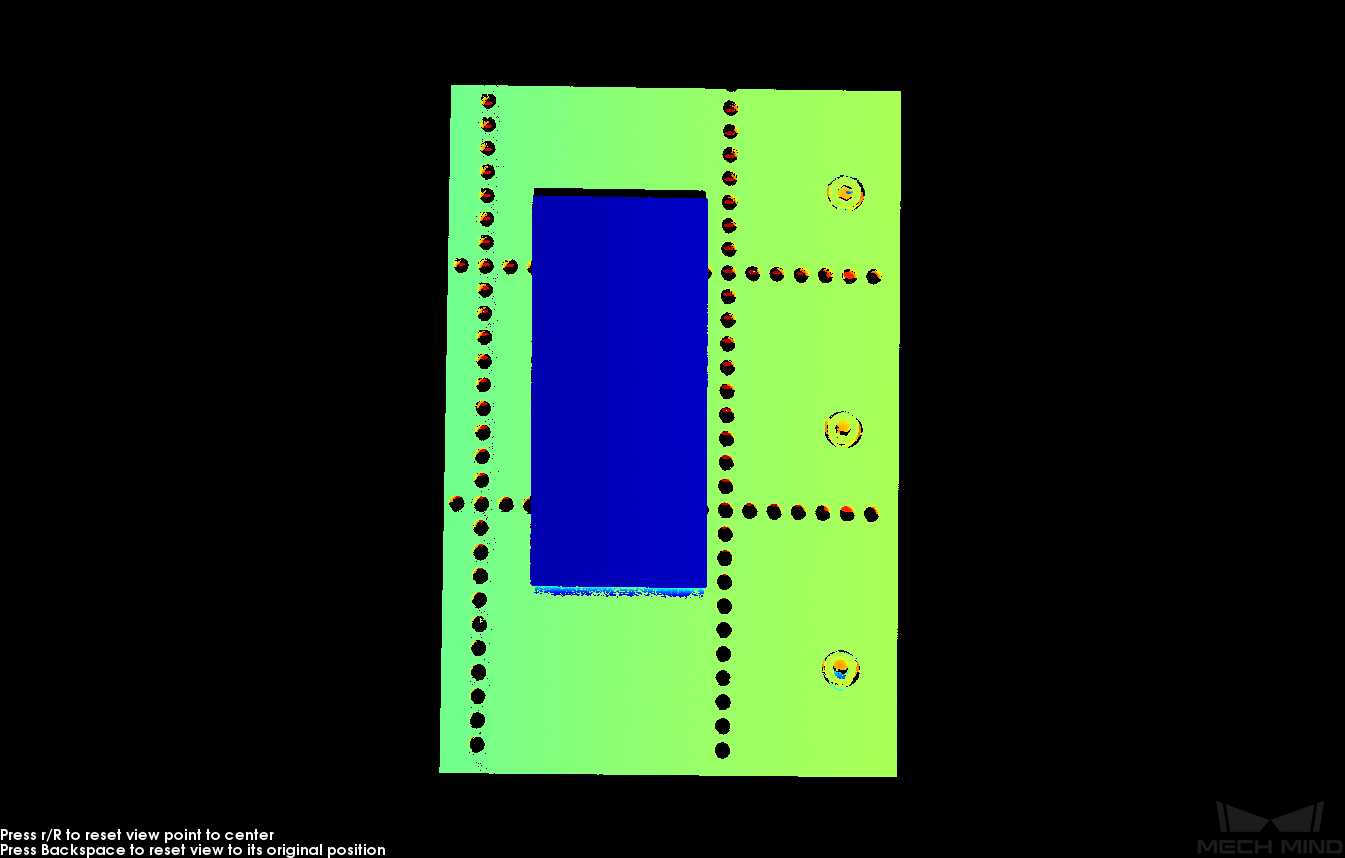
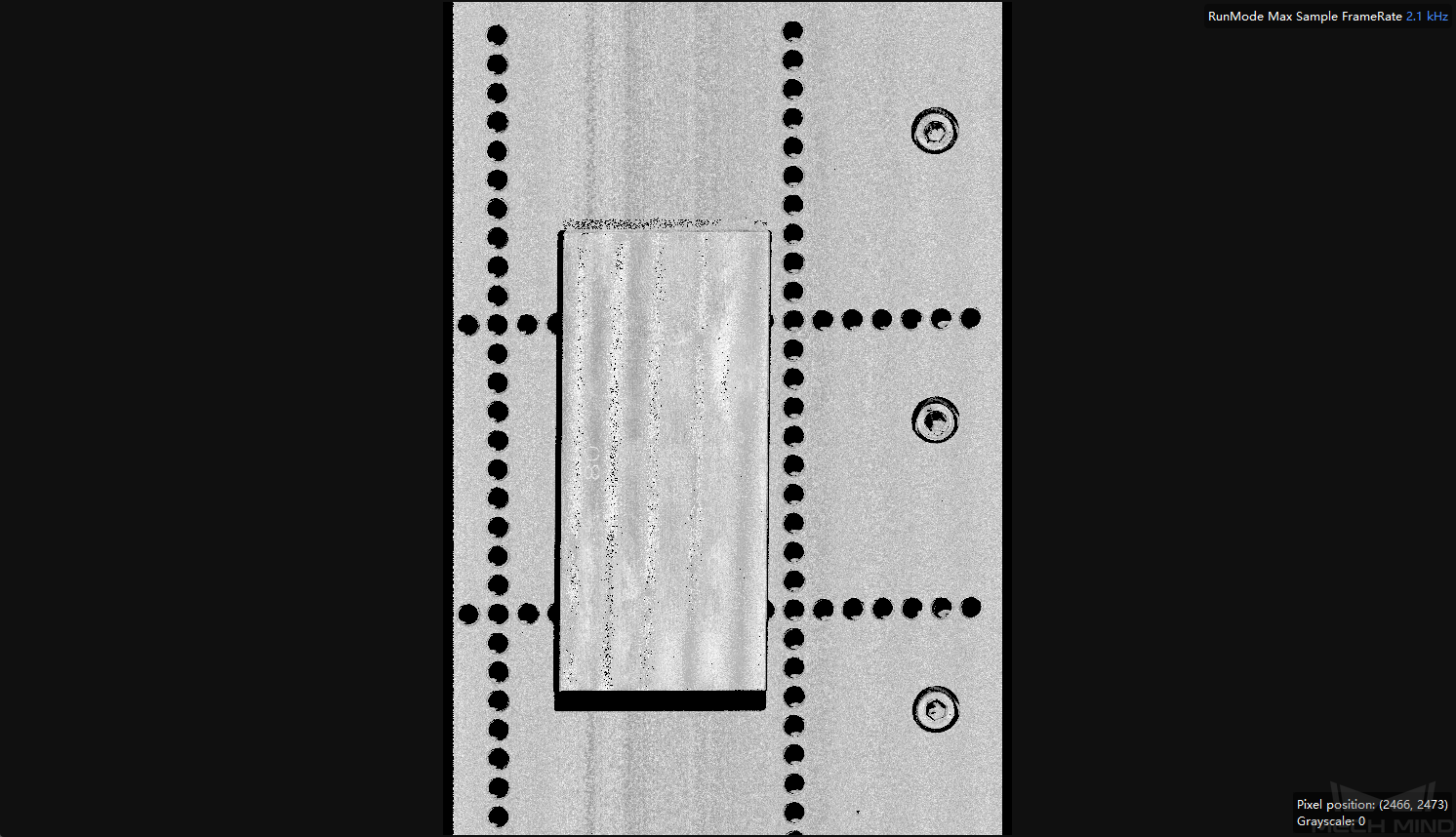
设置扫描行数,直至可扫描到完整金属块。以下示例仅供参考。
-
将扫描行数设置为2000,单击
,查看当前行数下的强度图。如下图所示,扫描到的金属块不完整。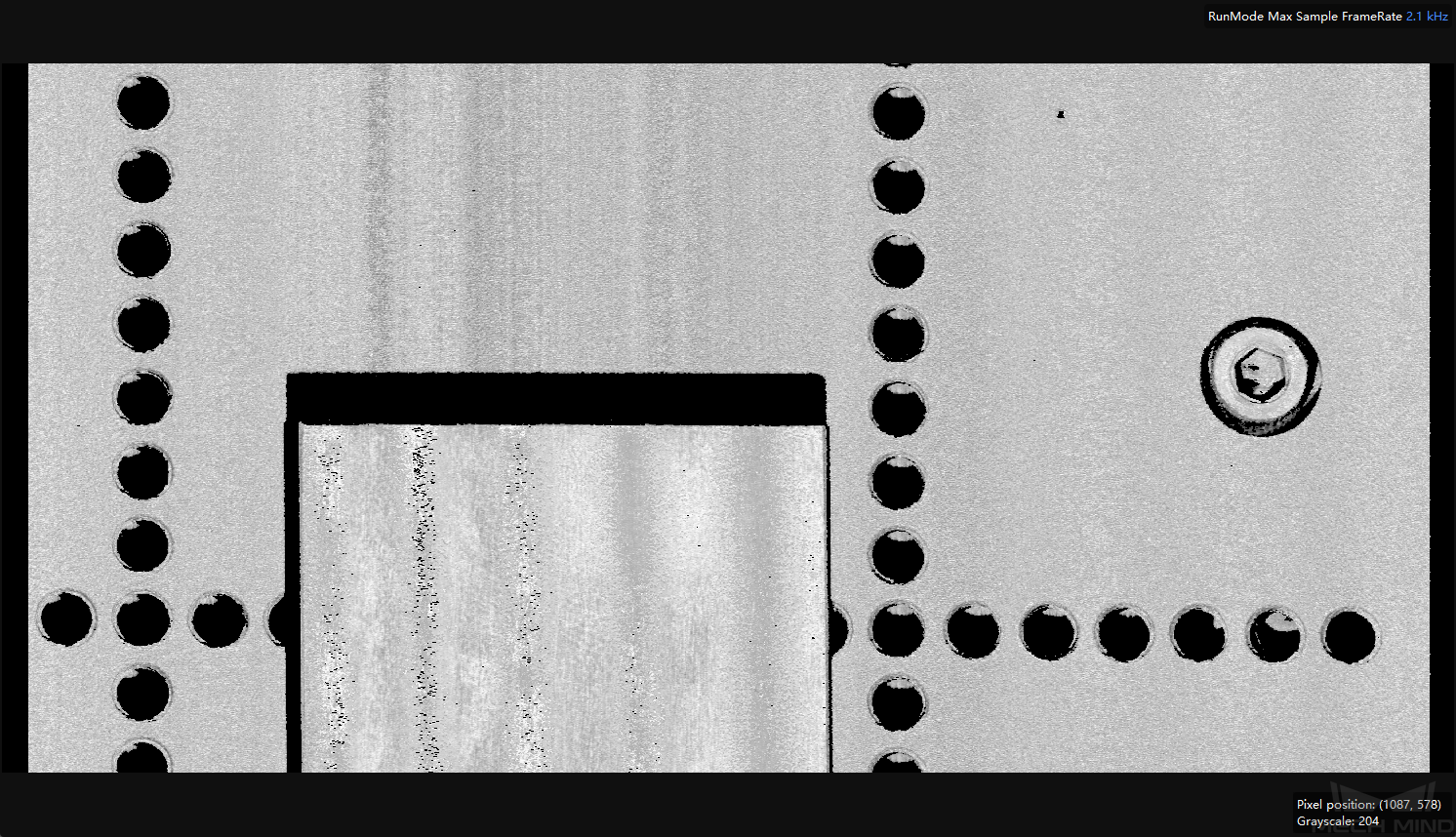
-
由于扫描到的金属块不完整,需重新设置扫描行数。根据实际扫描到的金属块长度进行估算,将扫描行数设置为6000,并重新采集。如下图所示,扫描到的金属块完整。
-
| 被拍摄物体颜色类型多样或材质复杂,易产生多重反射时,需调节更多参数。参见扫描模式下参数说明。 |
9. 使用数据
通过Mech-Eye Viewer获取的强度图、深度图和点云,可直接保存至本地,也可使用Mech-Vision或第三方机器视觉软件进行后续的处理和计算。
-
保存数据:单击数据采集区的
 ,设置保存路径,勾选需要保存的数据类型,再单击保存。
,设置保存路径,勾选需要保存的数据类型,再单击保存。 -
在Mech-Vision中使用数据:请参考 视觉系统教程,学习搭建包含Mech-Vision在内的整套视觉系统。
-
在第三方机器视觉软件中使用数据:通过Mech-Eye API或GenICam接口,可将轮廓测量仪获取的数据传输至第三方软件。