사용자 자체 정의 좌표계
이 도구는 좌표계를 자체 정의하는 데 사용됩니다. 자체 정의한 좌표계에서 뎁스 맵과 포인트 클라우드를 표시할 수 있습니다.
|
사용자 자체 정의 좌표계는 Mech-Eye Viewer의 뎁스 값 표시에만 영향을 미치며 저장된 뎁스 맵과 포인트 클라우드에 저장된 뎁스 값에 영향을 미치지 않습니다. |
적용 시나리오
대상 물체의 바로 위에 카메라가 설치되지 않은 경우에 사용되며, 아래 그림과 같습니다.
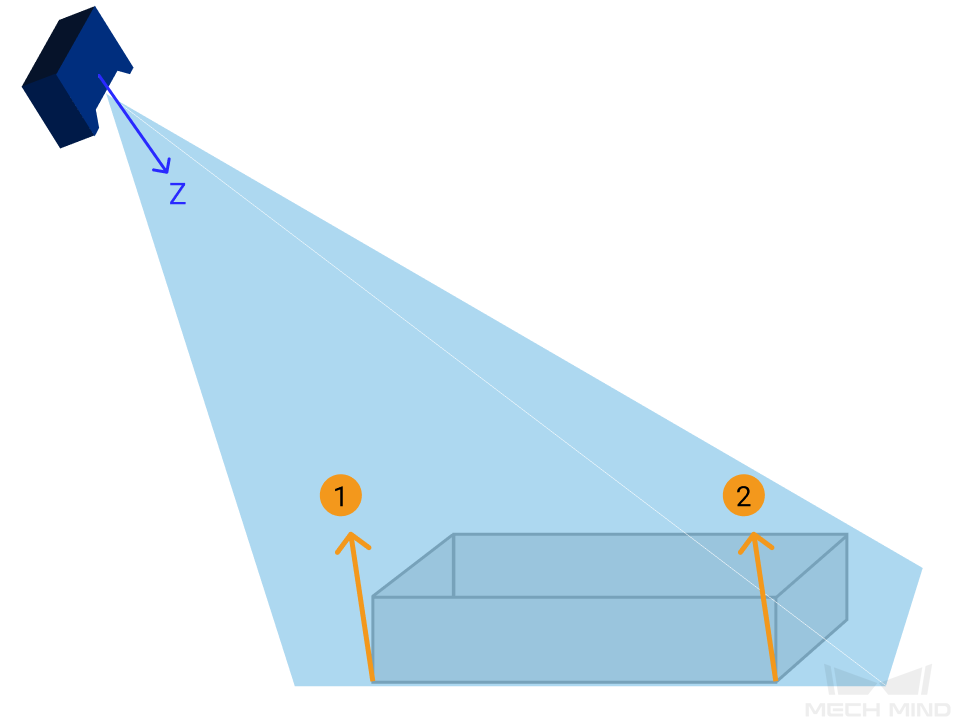
위의 그림에서 ①과 ② 지점은 관찰자에게서 동일한 높이에 위치합니다. 그러나 카메라 좌표계의 Z 축이 물체가 있는 평면과 수직이 아니기 때문에 얻은 뎁스 맵과 포인트 클라우드에서 이 두 점의 뎁스 값은 다릅니다.
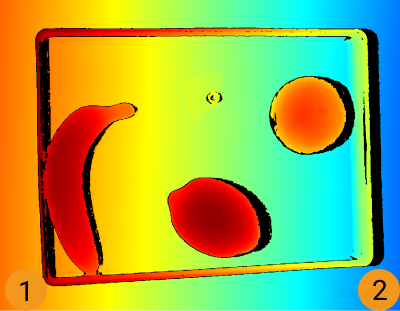
또한, 카메라 좌표계에서 매우 얇은 대상 물체의 두께는 위치한 평면의 뎁스 값 변화로 인해 쉽게 관찰할 수 없을 수 있습니다.
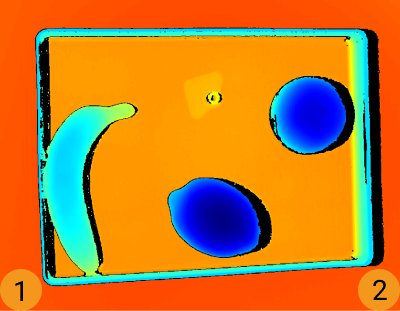
사용자 자체 정의 좌표계를 통해 뎁스 맵과 포인트 클라우드의 표시를 조정하여 ①과 ② 지점의 뎁스 값을 동일하게 표시하고 매우 얇은 대상 물체를 관찰할 수 있습니다. 아래 그림과 같습니다.
작업 프로세스
다음 단계를 수행하여 사용자 자체 정의 좌표계를 설정합니다.
-
포인트 클라우드를 조정하고 사용자 정의 기준 좌표계의 XY 평면으로 사용할 표면을 찾습니다.
-
Shift 키를 누른 상태에서 마우스 왼쪽 버튼으로 포인트 클라우드를 클릭하여 3개의 포인트를 선택합니다. 3개의 포인트의 기능은 아래와 같습니다.
-
첫 번째 포인트는 기준 좌표계의 원점입니다.
-
두 번째 포인트는 X축의 정방향을 결정합니다.
-
세 번째 포인트는 Y축의 정방향을 결정합니다.
-
-
3개의 포인트를 선택하면 오른손 법칙에 따라 기준 좌표계가 생성됩니다. 포인트 클라우드를 회전하거나 크기 조정하여 기준 좌표계가 요구 사항을 충족하는지 확인하십시오.
-
3개의 포인트는 동일한 표면에 있는지 확인합니다.
-
Z 축 방향이 올바른지 확인합니다.
요구 사항을 충족하지 않으면 오른쪽 하단의 리셋 버튼을 클릭한 후 단계2를 반복합니다.
-
-
좌표계 설정이 완료되면 오른쪽 하단의 확인 버튼을 클릭합니다.