视觉记录的保存与复现¶
使用保存的视觉记录,可复现仿真或实际生产过程中的问题。
当 Mech-Viz 运行出现问题时,通过保存的视觉记录,可以在不运行对应的 Mech-Vision 工程的前提下,直接运行 Mech-Viz 工程,来定位和解决问题。
本章主要包含以下内容:
视觉记录保存¶
依次单击位于 Mech-Viz 菜单栏的 ,进入设置视觉记录窗口。


视觉记录复现¶
使用流程¶
打开对应的 Mech-Viz 工程,即运行发生问题并保存了视觉记录的 Mech-Viz 工程。
确认 Mech-Vision 工程未注册在 Mech-Center 上,否则软件会优先调用 Mech-Vision 工程,并不会使用保存的视觉记录。
将 Mech-Viz 工程的视觉记录文件保存在软件根目录下的 vision_records 文件夹中(可通过依次单击 快速打开软件根目录)。
勾选 工具 下的 使用保存的视觉记录(仅在视觉服务未注册时) 。
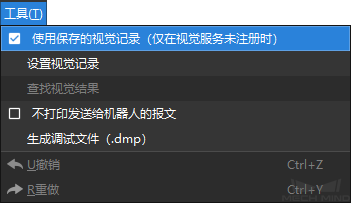
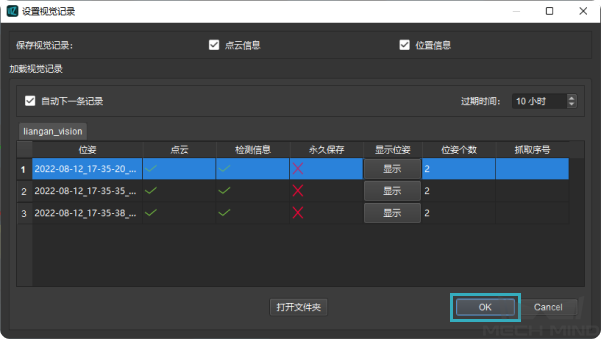
单击 仿真 或 运行 ,软件会检查 vision_records 文件夹是否有保存的视觉记录,并弹出 设置视觉记录 窗口。
选中需要复现的视觉记录后单击 OK ,将自动开始复现当前记录。



注意
复现视觉记录结束后,请务必要取消勾选 使用保存的视觉记录(仅在视觉服务未注册时) ,避免发生不必要的错误。
使用技巧¶
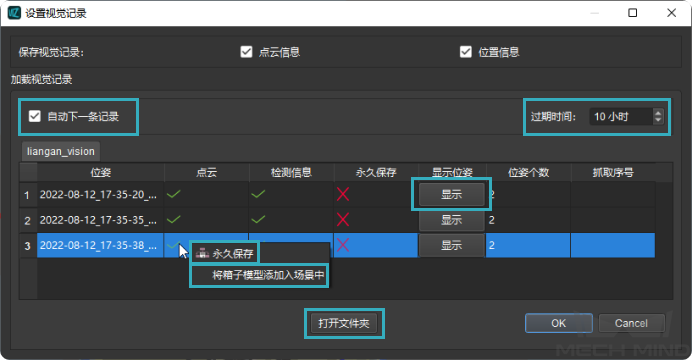
自动下一条记录 |
若不勾选,则会重复使用选中的视觉记录; 勾选后,将会在复现完选中的视觉记录后,自动跳转到下一条视觉记录,当跳转到最后一条视觉记录后,将停止复现。 |
过期时间 |
保存的视觉记录超过该设置时间后将被删除。 |
打开文件夹 |
单击后打开软件根目录下的 vision_records 文件夹。 |
显示 |
单击 显示 ,将在三维仿真空间内显示此条视觉记录中的视觉位姿。 |
右键单击任意视觉记录条目,在弹出的快捷菜单中,有如下两个菜单项: |
|
永久保存 |
单击永久保存后,此条视觉记录将永久保存,不受过期时间影响。 |
将箱子模型添加入场景中 |
单击后将加载并显示场景中的箱子模型。 |