工程详解¶
应用场景¶
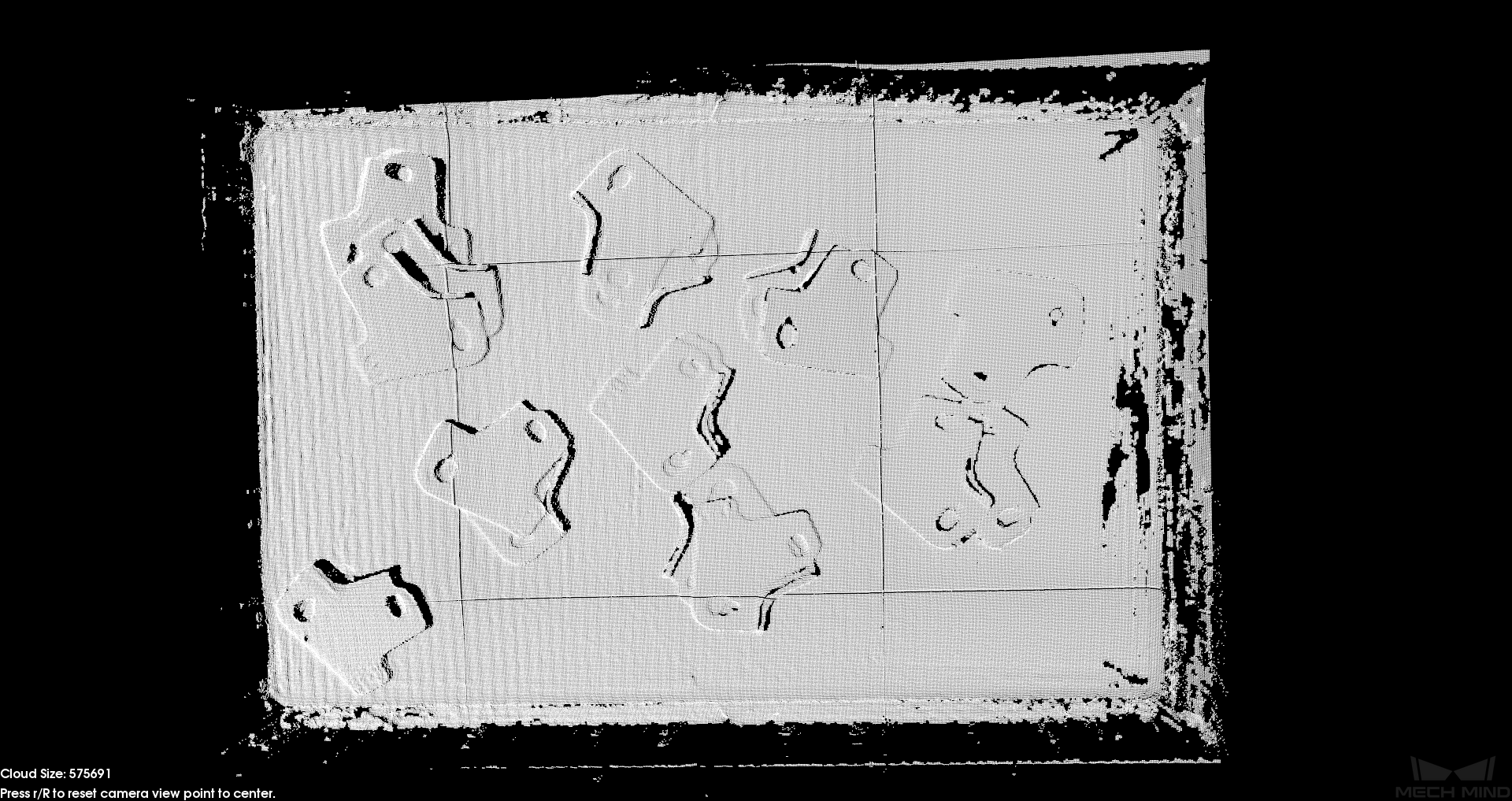
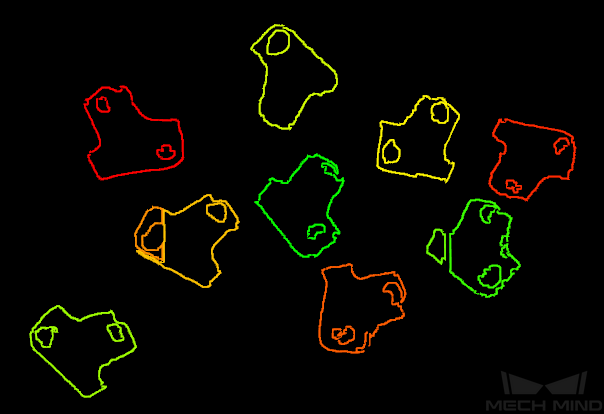
平面工件堆叠典型应用工程的工件满足:工件特征较少,主要集中在工件边缘数量多,容易产生堆叠,不区分正反面的特点。
工程搭建¶
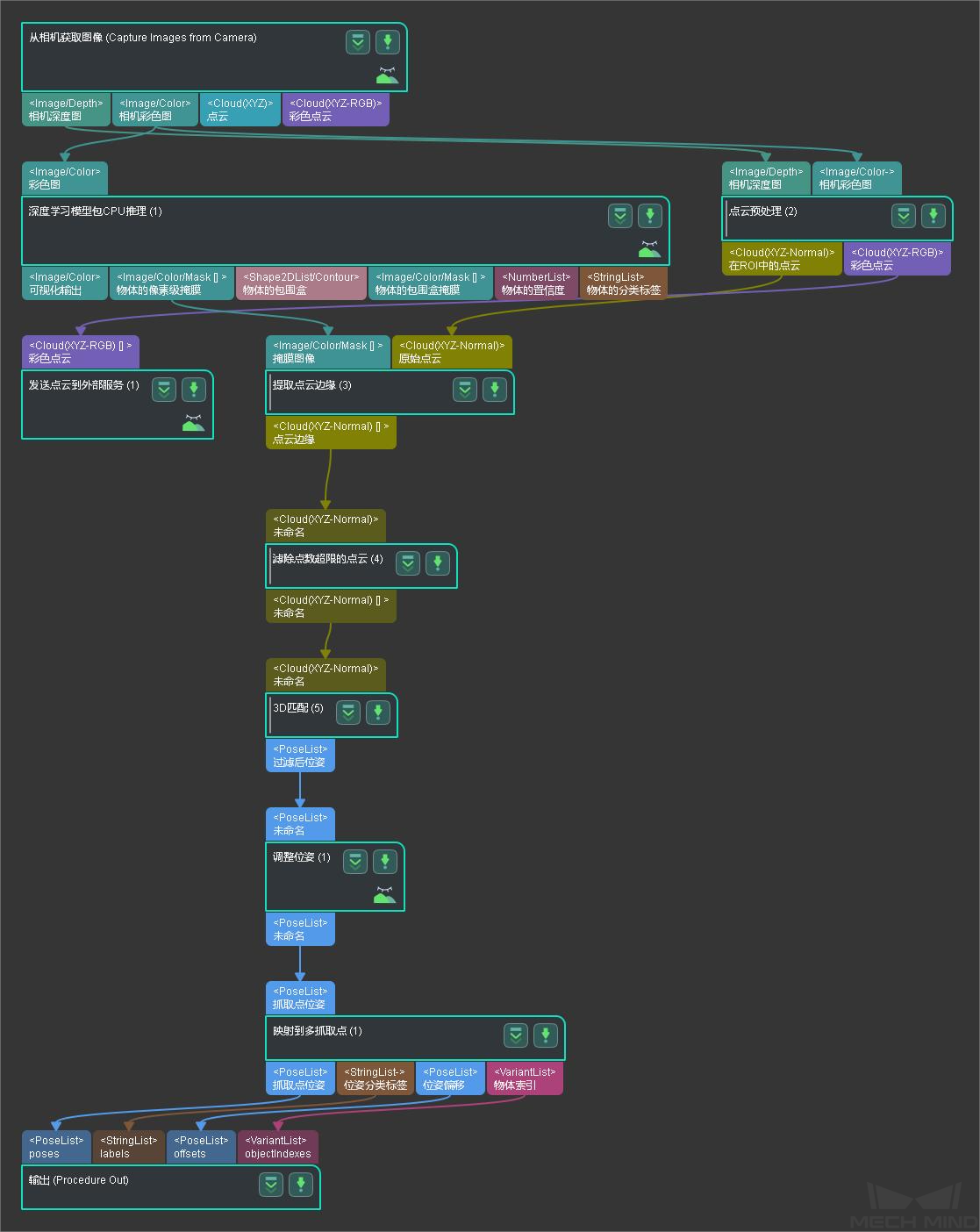
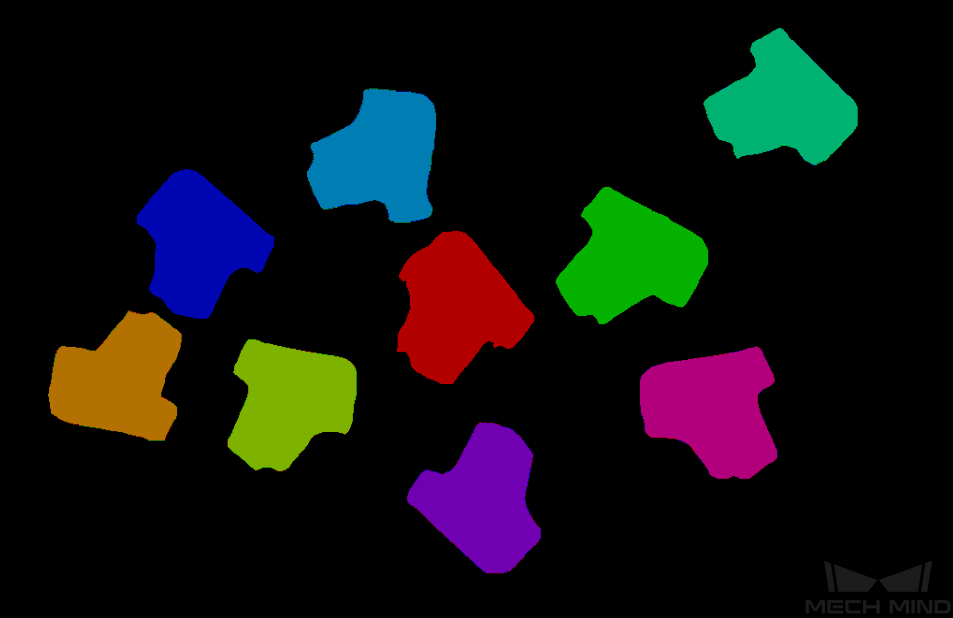
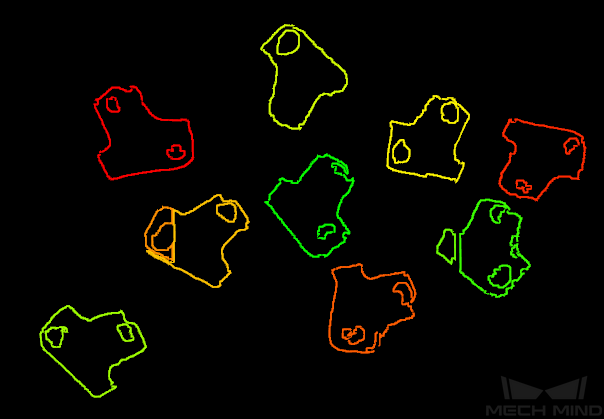
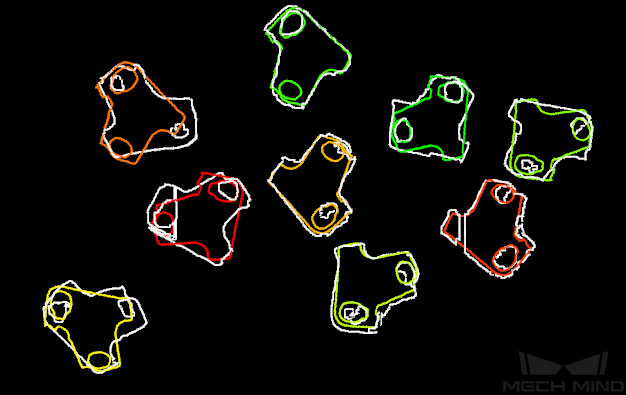
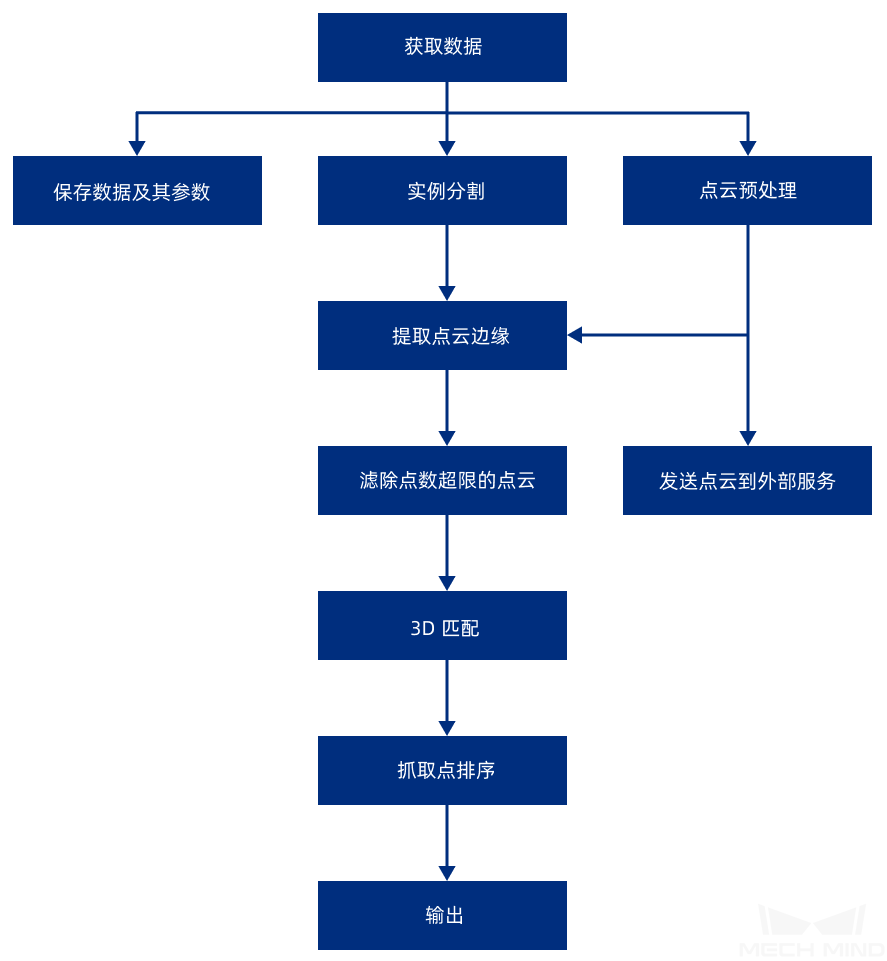
根据背景描述可知,工件数量较多,容易产生堆叠,并且工件特征主要集中在工件边缘。因此,在实例分割后只提取工件边缘的点云进行 3D 匹配,减少工件内部无用特征的干扰。平面工件堆叠典型应用工程的流程如下图所示。
平面工件堆叠典型应用工程的工件满足:工件特征较少,主要集中在工件边缘数量多,容易产生堆叠,不区分正反面的特点。
根据背景描述可知,工件数量较多,容易产生堆叠,并且工件特征主要集中在工件边缘。因此,在实例分割后只提取工件边缘的点云进行 3D 匹配,减少工件内部无用特征的干扰。平面工件堆叠典型应用工程的流程如下图所示。