开始
开始你的第一个应用
软件使用指南
机器人通信配置指南
应用指南
附录
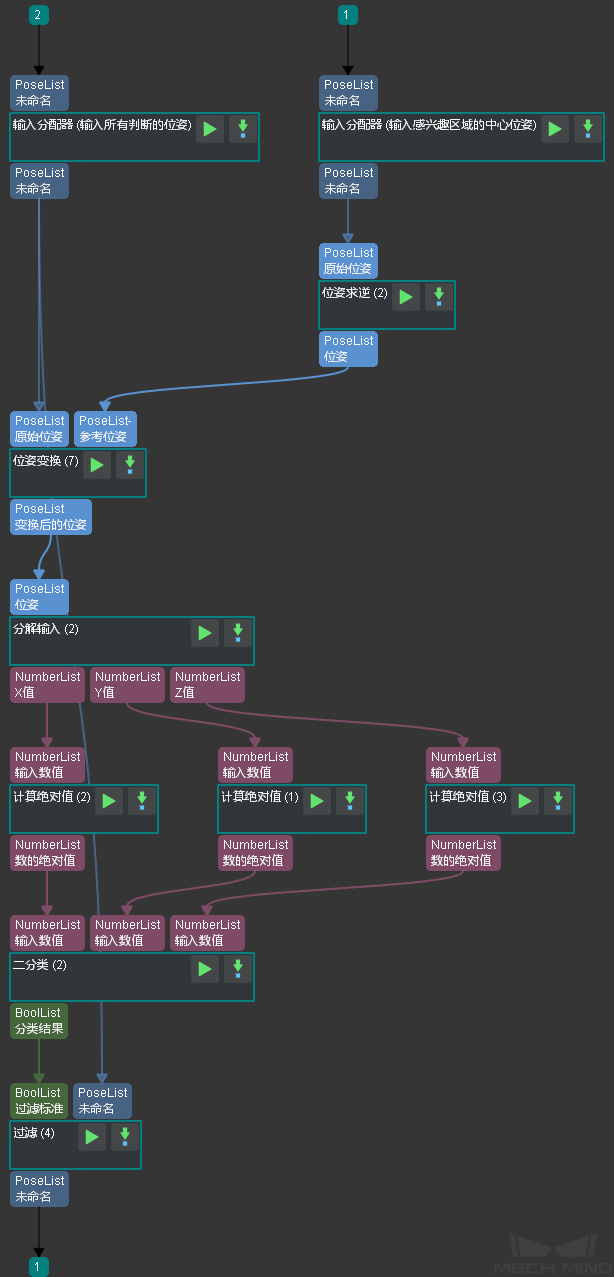
滤除感兴趣区域之外的位姿的主要功能是滤除不在感兴趣区域内的位姿,加快后续对于位姿的操作的运行速度。其组成如图1 所示。
图1 滤除感兴趣区域之外的位姿步骤组合¶
各个步骤的作用如下:
位姿求逆 对感兴趣区域的中心位姿求逆。 位姿变换 输入需要判断的位姿和求逆后的感兴趣区域的中心位姿,让需要判断的位姿的相对坐标系转换到感兴趣区域中心位姿的坐标系下。 分解物体尺寸 和 计算绝对值 将位姿XYZ坐标取绝对值,为判断其坐标是否在感兴趣区域内做准备。 根据阈值对数值进行二分类 设置感兴趣区域范围,判断XYZ绝对值是否在感兴趣区域中。 过滤 滤除不在感兴趣区域的位姿。
位姿求逆 对感兴趣区域的中心位姿求逆。
位姿变换 输入需要判断的位姿和求逆后的感兴趣区域的中心位姿,让需要判断的位姿的相对坐标系转换到感兴趣区域中心位姿的坐标系下。
分解物体尺寸 和 计算绝对值 将位姿XYZ坐标取绝对值,为判断其坐标是否在感兴趣区域内做准备。
根据阈值对数值进行二分类 设置感兴趣区域范围,判断XYZ绝对值是否在感兴趣区域中。
过滤 滤除不在感兴趣区域的位姿。