빨판 구성기¶
빨판 구성기 화면에서 현재 직사각형, 단일 파티션, 다종 파티션, 단행 및 파티션 크기가 같은 빨판만 구성할 수 있습니다. 원형, 여러 행 및 파티션 크기가 서로 다른 빨판은 여기서 구성하지 못합니다.
구성이 끝난 후 대응하는 구성 파일이 생성되며 사용자는 파일을 호출할 창으로 도입하면 됩니다.
힌트
리얼 로봇의 빨판에 따라 구성하면 됩니다.
측면 빨판은 밑바닥만 구성하면 되고 다종 파티션 모드와 DI 감지는 아직 지원하지 않습니다.
빨판 구성¶
빨판의 파티션을 구성하기
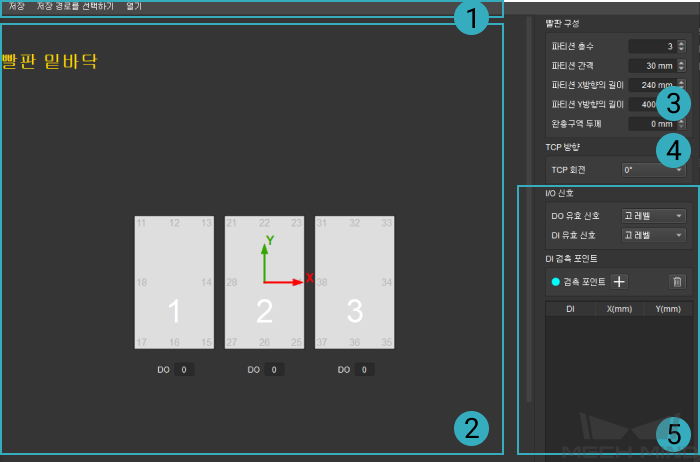
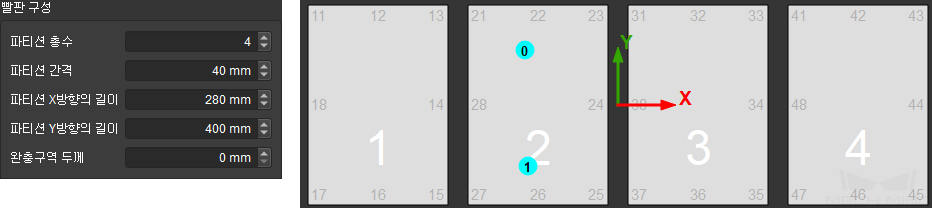
빨판 구성 구역 에서 파티션 총수 , 파티션 간격 , 파티션 X방향의 길이 및 파티션 Y방향의 길이 (아래 왼쪽 그림과 같음) 등 내용을 설정하여 표시줄 에서 실시간으로 표시됩니다(아래 오른쪽 그림과 같음).
충돌 감지에 사용되는 완충 구역의 두께를 설정합니다. 완충 구역은 TCP 위치에서부터 아래로 생성됩니다. 파티션이 열려 있는 경우 완충 구역의 두께는 설정된 두께 값이고 파티션이 닫혀 있는 경우 완충 구역의 두께는 0입니다.
힌트
병렬로 배치된 여러 개의 직사각형 빨판에 대해 같은 DO 신호를 사용하는 경우 여러 파티션이 하나의 파티션으로 간주됩니다. 파티션을 구성할 때 하나의 큰 파티션만 만들면 됩니다.
TCP 방향 설정
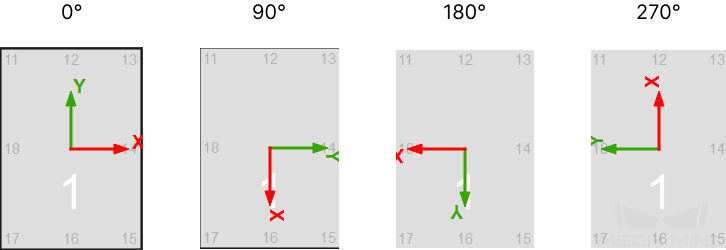
TCP의 회전 각도가 다르면 좌표계도 다릅니다. 아래 도표를 참고하여 실제 경우에 따라 설정하십시오.
I/O 신호 설정
리얼 로봇 IO 보드의 유형에 따라 고 레벨 혹은 저 레벨 을 선택하세요.
DI 검측 포인트 구성
I/O 신호 구성 구역에서 + 를 클릭하여 검측 포인트를 새로 추가합니다. 기본적으로 검측 포인트의 DI 값은 0이고 위치는 빨판 가운데에 있습니다.
DI 에서 검측 포인트의 명칭을 수정하고 적당한 위치로 드래그하면 검측 포인트의 좌표가 I/O 신호 구성 구역에 나올 것입니다. 아래 그림과 같이 좌표를 수정하면 검측 포인트를 이동할 수 있습니다.

검측 포인트를 삭제하려면 선택한 다음에
 를 클릭하면 됩니다.
를 클릭하면 됩니다.DO 수량을 설정하기
표시줄에서 대응한 빨판 아래에 입력하면 됩니다.
빨판의 구성 파일을 저장하고 사용하기¶
빨판을 설정한 후 저장 또는 저장 경로를 선택하기 를 클릭하여 JSON 파일을 선택된 경로로 저장할 수 있습니다.
열기 를 클릭하여 기존 빨판 구성 파일(JSON 파일)을 선택할 수 있습니다.