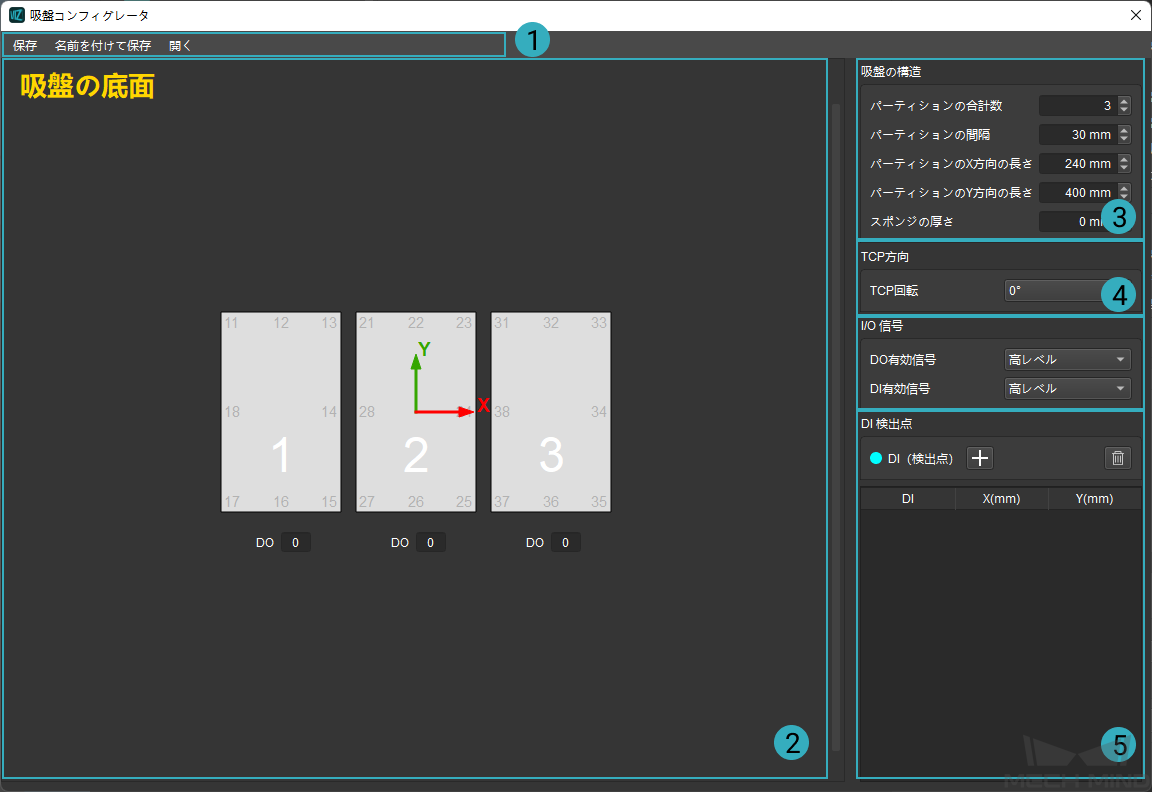
吸盤コンフィグレータ¶
現在、長方形、単一パーティション、複数パーティション、単一行、同じパーティションサイズの吸盤設定のみをサポートしています。円形、複数行、および異なるパーティションサイズの吸盤をサポートしていません。
設定が完了すると、ソフトウェアは対応するコンフィグファイルを生成できますので、ユーザーは呼び出す必要のあるウィンドウにファイルを入力するだけで済みます。
ヒント
実際に使用したロボットに応じて吸盤を設定できます。
側吸吸盤は底面のみを設定可能です。複数パーティションやDI検出に対応していません。
吸盤設定¶
吸盤のパーティションを設定する
吸盤設定エリア (下図の左側)で、 パーティションの合計数 、 パーティションの間隔 、 パーティションのX方向の長さ 、および パーティションのY方向の長さ を設定すると、 表示バー (下図の右側)にリアルタイムで表示されます。
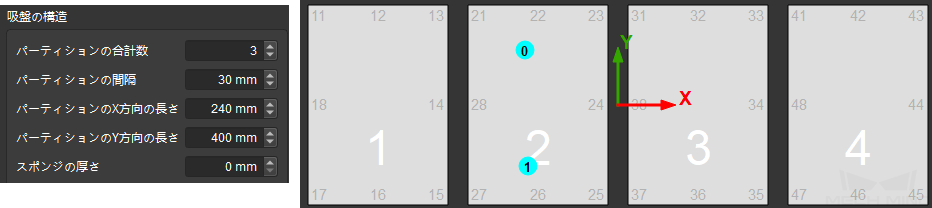
スポンジ層は、衝突検出に使用されるスポンジ層の厚さを設定します。スポンジ層はTCP位置から下に向かって生成されます。パーティションをオンにすると、スポンジ層の厚さが設定された厚さになります。パーティションをオフにすると、スポンジ層の厚さが0になります。
ヒント
複数の平行な長方形の吸盤の場合、複数のパーティションが同じDO信号制御を共有する場合、それは完全なパーティションと見なされます。それを構成する場合、1つの大きなパーティションを作成するだけです。
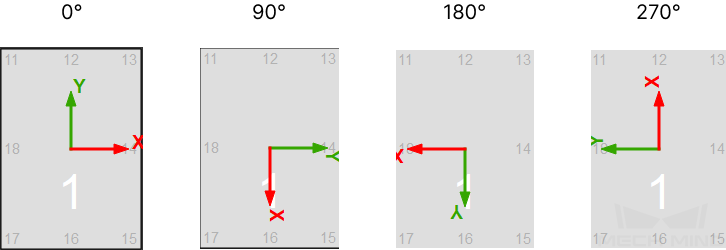
TCP方向を設定する
TCPがさまざまな角度で回転すると、座標系も異なります。次の表を参照してください。
I/O信号を設定する
実際の状況に応じてDO/DI有効信号を 高レベル または 低レベル に選択してください。
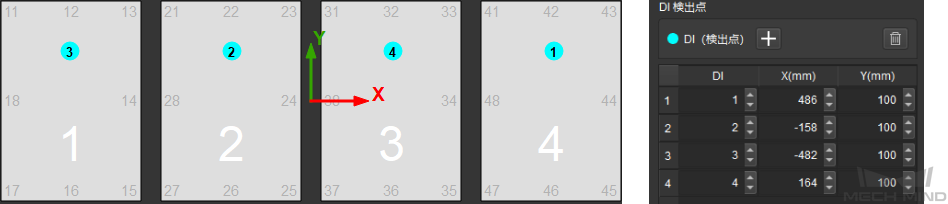
DI検出点を設定する
I/O信号設定エリア で、 + をクリックして検出点を追加します。検出点のデフォルトのDIは0で、吸盤の中央にあります。
DI で検出点の名前を変更し、検出点を適切な位置にドラッグすると、検出点の座標が I/O信号設定エリア に表示されます。同様に、下図に示すように、座標を変更して検出点を移動することができます。
検出点を削除するには、それを選択した後、
 をクリックします。
をクリックします。DO数を設定する
表示バーの対応する吸盤に入力できます。
吸盤のコンフィグファイルの設定と使用¶
吸盤を設定した後、 保存 または 名前を付けて保存 をクリックし、jsonファイルを選択したパスに保存することができます。
開く をクリックし、既存の吸盤コンフィグファイル(json形式)を選択することができます。