ランダムな複数キャリブレーションボード位置姿勢を使用するETHキャリブレーション¶
本節では、ランダムな複数キャリブレーションボード位置姿勢を使用するETHキャリブレーションの実行をガイドします。
キャリブレーションのプリセット¶
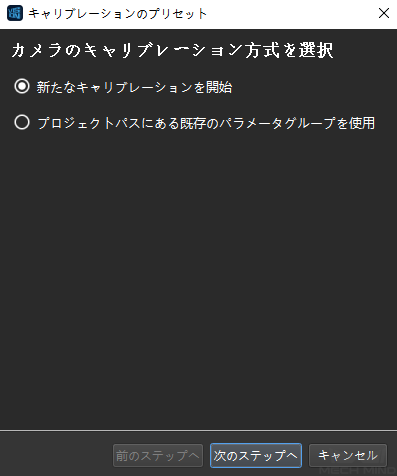
Mech-Visionを起動して、ツールバーで カメラキャリブレーション(標準モード) をクリックして キャリブレーションのプリセット ウィンドウが表示されます。
カメラのキャリブレーション方式を選択 ウィンドウで、新たなキャリブレーションを開始 を選択して 次のステップへ をクリックします。
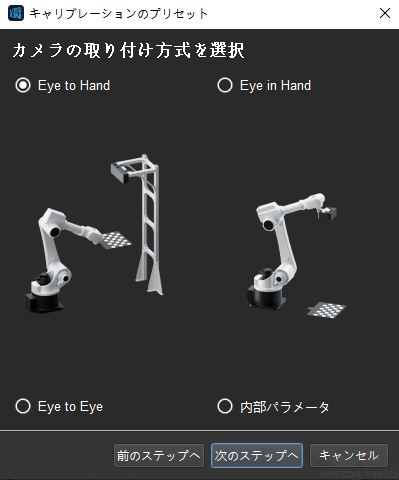
カメラの取り付け方式を選択 ウィンドウで、Eye to Hand を選択して 次のステップへ をクリックします。
校正点の追加方法を選択 ウィンドウで ランダムな複数キャリブレーションボード位置姿勢 を選択して キャリブレーション開始 をクリックします。

ここでプリセットが完了し、キャリブレーションを実行することになります。
キャリブレーションのプロセス¶
注釈
以下では、ロボット接続済みの場合を例として操作手順を説明します。特殊タイプのロボットを使用する場合、詳細なキャリブレーション手順は、 手動キャリブレーションの実行手順 をご参照ください。
カメラ接続¶
カメラに接続 画面で、検出されたカメラ リストに接続するカメラを選択して
 をクリックするか、接続するカメラをダブルクリックします。
をクリックするか、接続するカメラをダブルクリックします。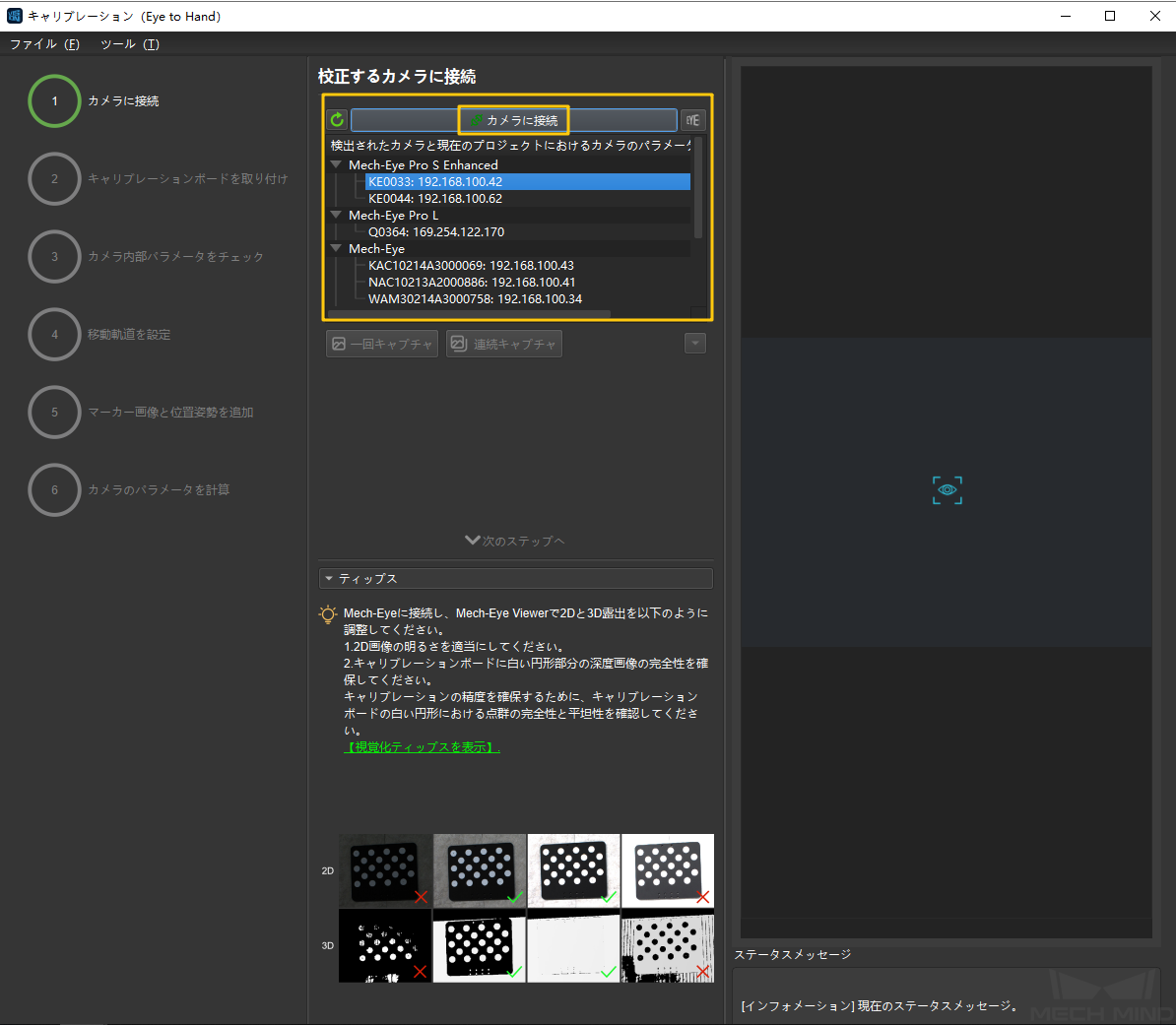
カメラに接続してから 連続キャプチャ または 一回キャプチャ をクリックします。
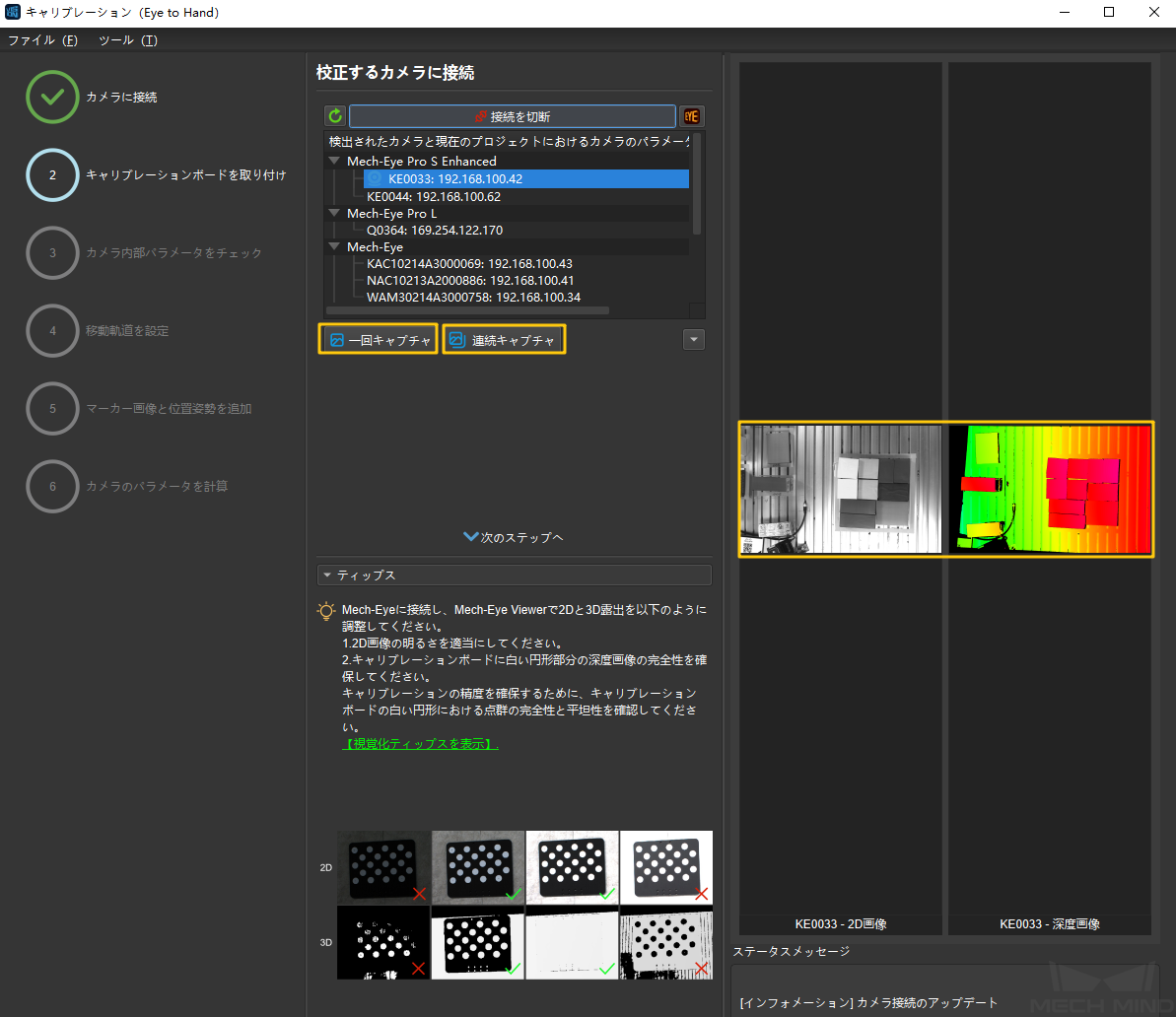
画面の右側に表示される画像がキャリブレーションの要件を満たしていることを確認し、 次のステップへ をクリックします。
注釈
キャプチャした画像は要件を満たさなければ、Mech-Eye Viewerを起動してカメラの2D・3D露出パラメータを調整してから改めてキャプチャしてください。
キャリブレーションボードの取り付け¶
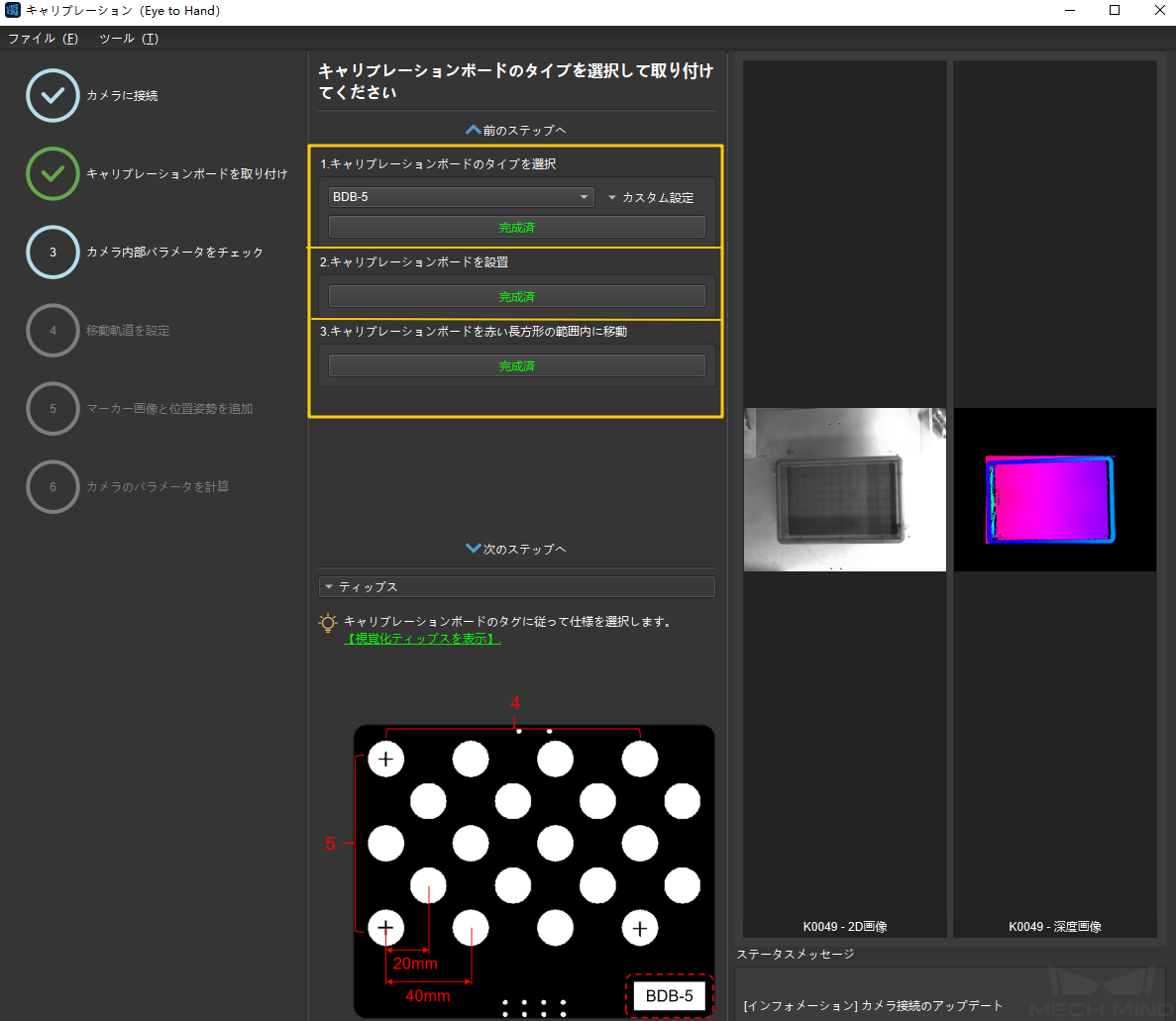
キャリブレーションボードを取り付ける 画面で、使用するキャリブレーションボードの型番(キャリブレーションボードの上部に型番ラベルが貼ってあります)を選択して、 確認 ボタンをクリックします。
キャリブレーションボードをロボットフランジにしっかりと取り付けたら、 確認 ボタンをクリックします。
Mech-Vizを使用してキャリブレーションボードがカメラの視野中央(カラー画像の赤い長方形内)に配置するようロボットを制御し、 確認 ボタンをクリックします。
キャリブレーションボードの設定が完了したら、 次のステップへ をクリックします。
カメラ内部パラメータのチェック¶
カメラ内部パラメータをチェック 画面で、カメラ内部パラメータをチェック をクリックします。
チェックの結果を確認します。
カメラ内部パラメータのチェックが正常に完了したら、次のステップへ をクリックします。
カメラ内部パラメータのチェックが失敗したら、補助円を描くか、手動で検出パラメータを編集してから カメラ内部パラメータをチェック をクリックします。
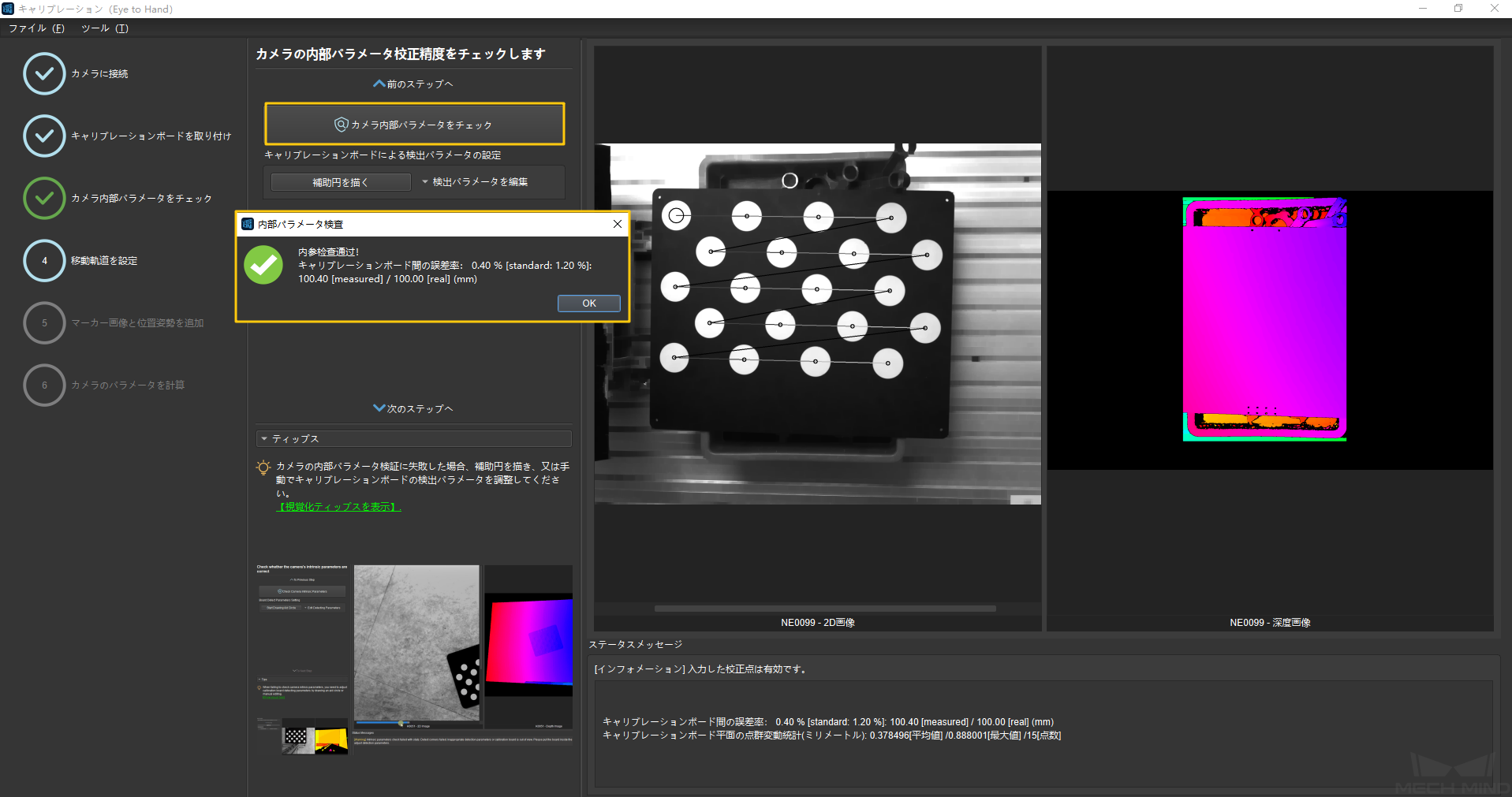
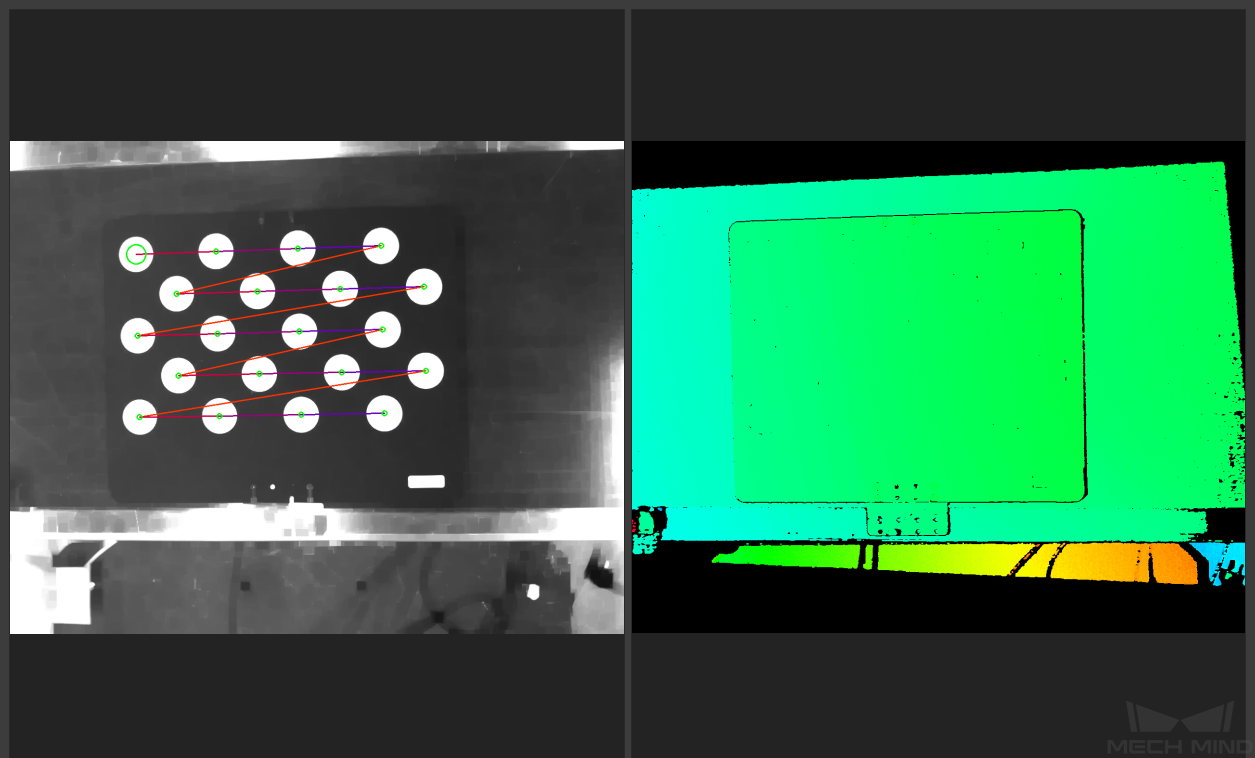
普通、照明が良好でカメラのパラメータが適切な場合、初期値を使用すれば検出できます。下図に示すのは、特徴点の検出に成功した画面です。
補助円を描画
補助円を描く場合、 補助円を描画 をクリックします。認識するドットに円を描いて選択したら、ドット検出パラメータの値が変わります。
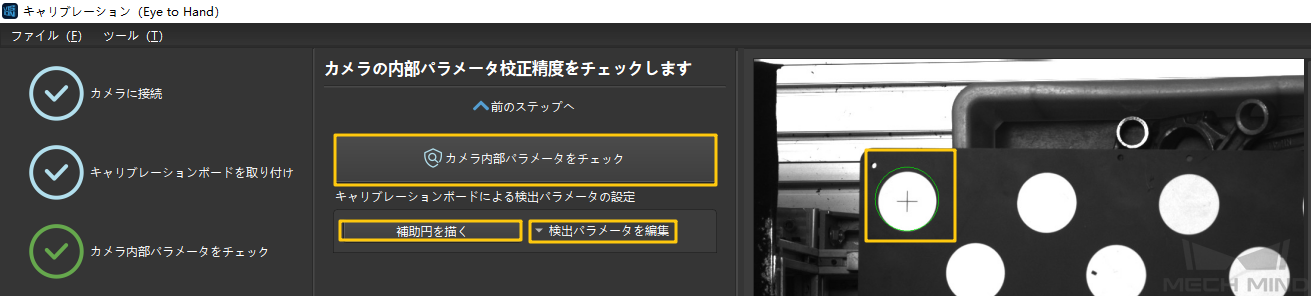
ちなみに
キャプチャした画像に、ドットが小さすぎて選択できなければ、 2D画像で 右クリック し、 ウインドウに合わせて調整 のチェックを外して、 元画像サイズに調整 にチェックを入れます。画像のサイズを調整してから補助円を描画します。
手動で検出パラメータを調整
手動で検出パラメータを調整する場合、 検出パラメータを編集 をクリックして、検出パラメータの値を変更します。
カメラのパラメータを調整
それでも特徴点が検出されない場合、現場の状況に応じてカメラ関連のパラメータを調整する必要があります。カメラのパラメータ調整については、 パラメータ調整 をご参照ください。
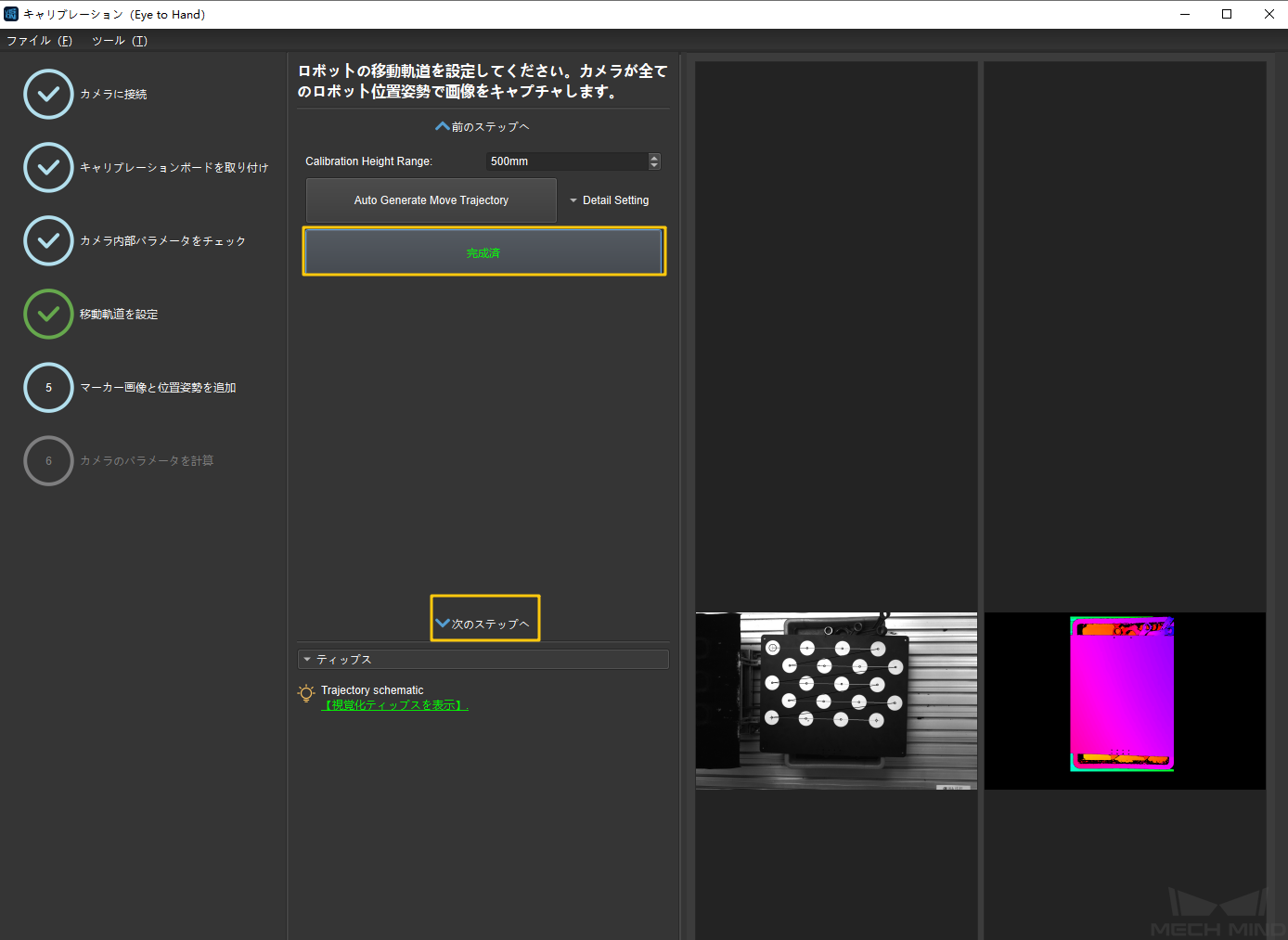
移動経路の設定¶
移動経路を設定 画面で カメラ深度方向のキャリブレーション範囲 を設定します。
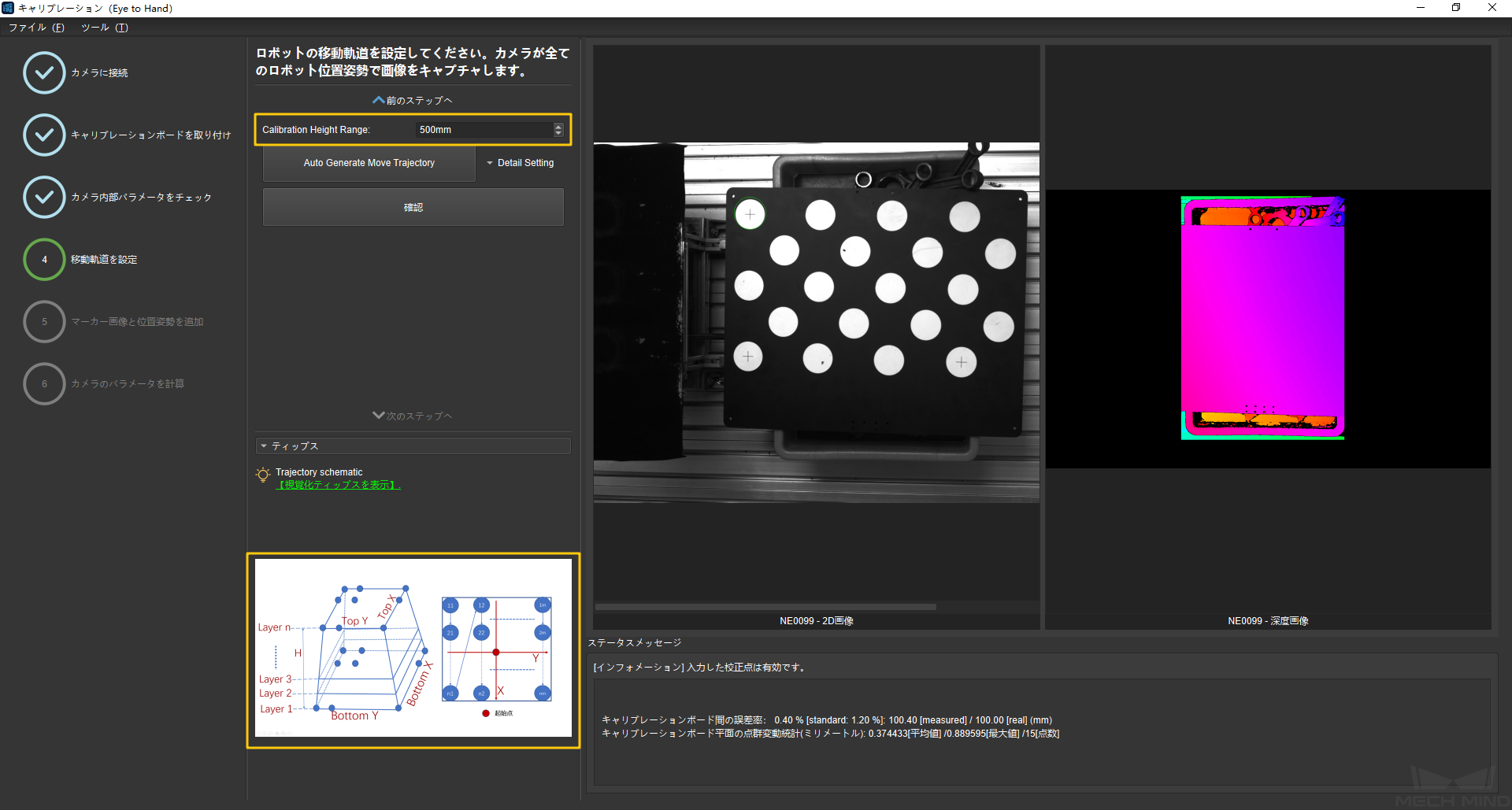
ちなみに
カメラの推奨稼働範囲とロボットの稼働スペースに応じて カメラ深度方向のキャリブレーション範囲 を設定してください。
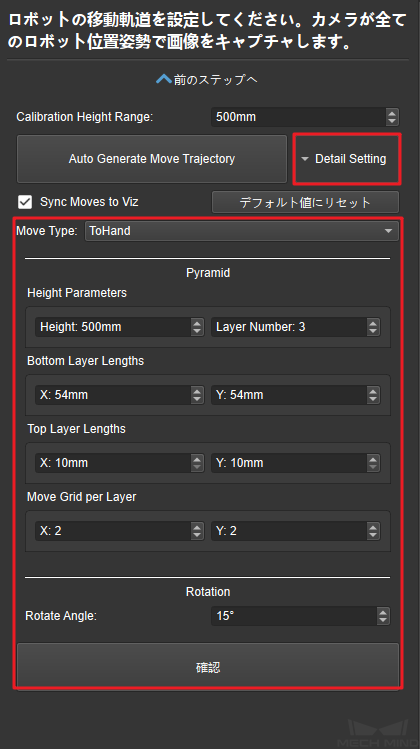
詳細設定 をクリックして移動経路設定の画面を表示します。ニーズに応じて高さ、下部レイヤーの長さ、最高レイヤーの長さ、レイヤーごとにグリッドを移動、回転角度を調整します。
経路パラメータを自動生成 をクリックしたら運動経路の各点が自動的に生成されます。正常に生成されたら、成功のメッセージが表示されます。下図に示します。
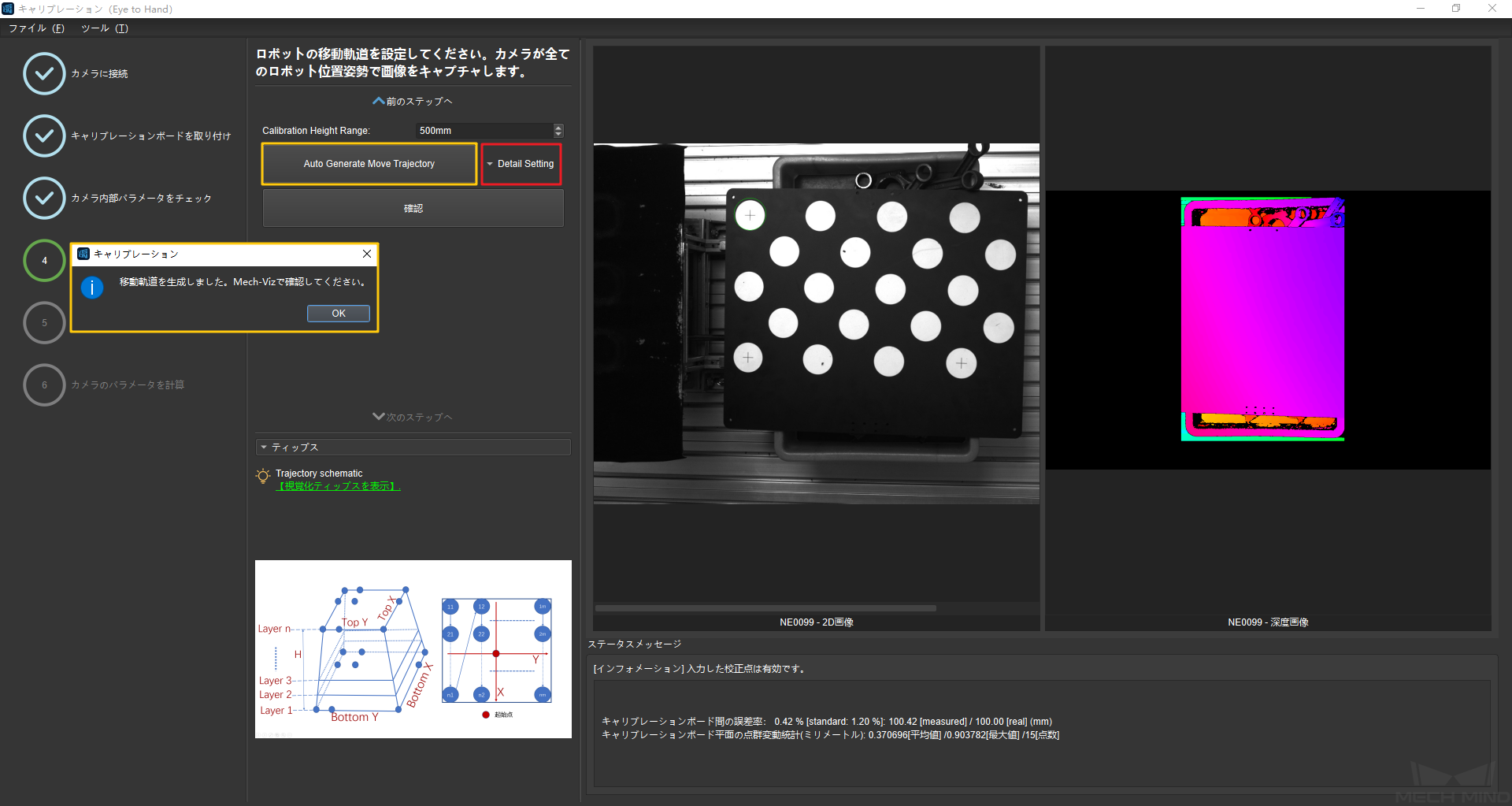
Mech-Vizで各経路点をチェックします。周辺と衝突が発生しないことを確認してください。
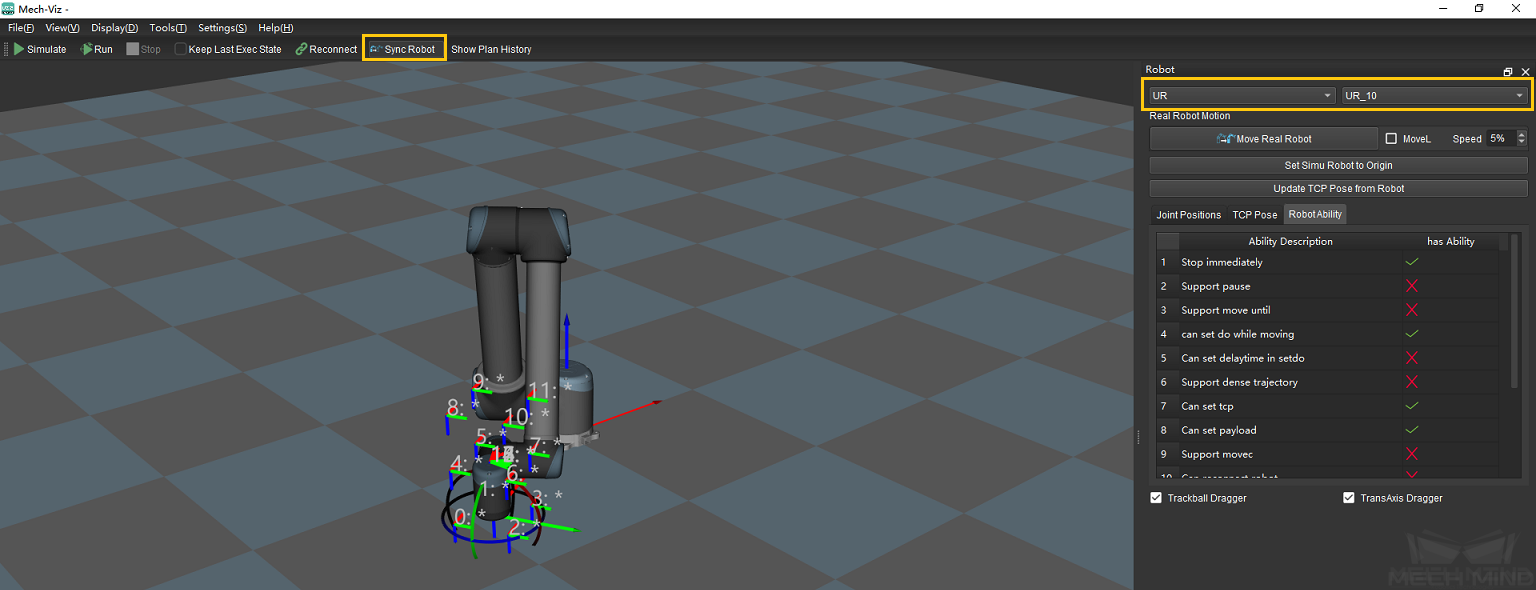
Mech-Vizを起動し、 ロボット パネルをクリックし、現在接続されているロボットの型番を選択します。下図に示すように、 ロボットを同期させる をクリックして、自動生成された移動経路の経路点の分布を確認できます。この手順で、各経路点の位置が適切であり、周囲環境と衝突しないことを確認する必要があります。
下図に示すように、Mech-Visionでは 次のステップへ をクリックします。
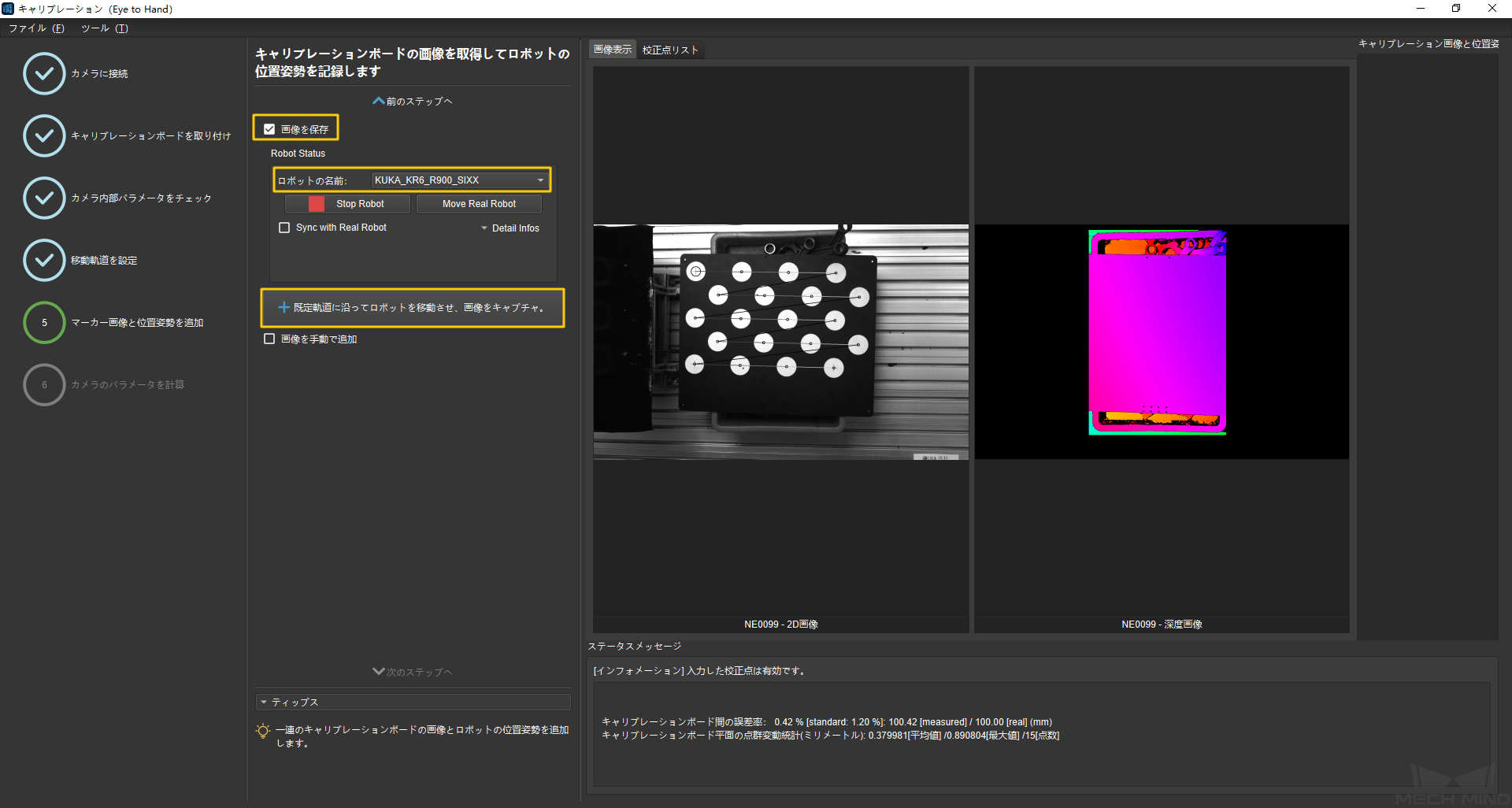
キャリブレーション画像と位置姿勢の追加¶
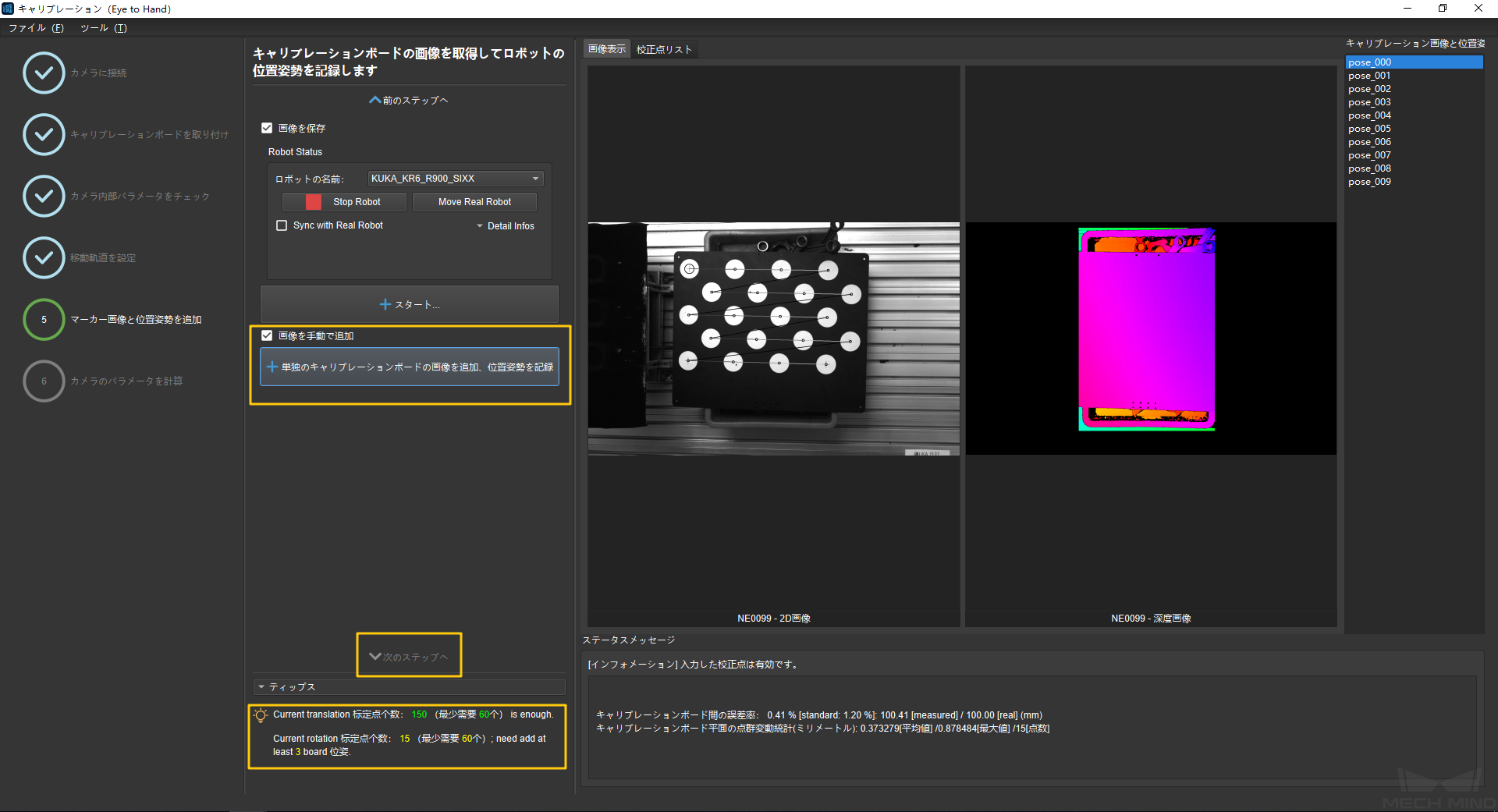
下図に示すように、 キャリブレーションの画像と位置姿勢を追加 の画面に入ります。 画像を保存 にチェックを入れ、接続されているロボットの型番を確認した後、 既定経路に沿ってロボットを移動させ、画像をキャプチャ をクリックします。
安全なロボット移動経路を確保するためのプロンプトを確認して OK をクリックします。
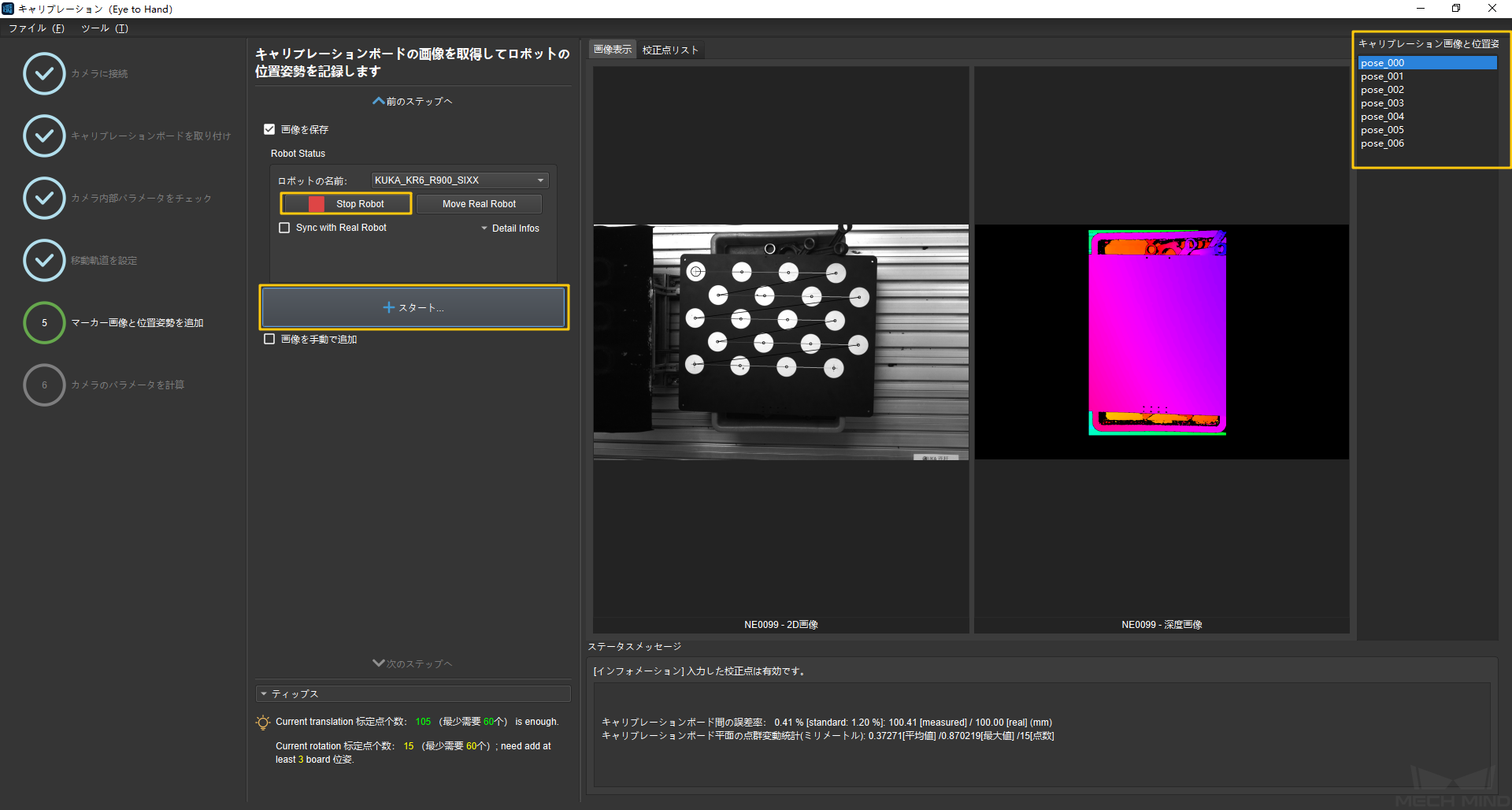
ロボットが設定された径路に沿って移動し、カメラが各経路点の画像をキャプチャします。画面の右側にキャプチャされた画像が表示されます。
注意
ロボット稼働中に、稼働範囲に近づかないでください。
「ロボットを停止」ボタンをクリックすると、キャリブレーションプロセスを終了できますが、ロボットは現在の経路点に達するまで停止しません。緊急時にロボットティーチングペンダントの非常停止ボタンを押してください(非常停止を押した後、ロボットに再接続する必要があります)。
画像のキャプチャが完了したら、現在認識しいる校正点が要件を満たすかどうかをチェックして 次のステップへ をクリックします。
ちなみに
満たさない場合、ロボットを手動で移動する必要があり(ティーチングペンダントを使用して移動するか、Mech-Vizを使用して移動させます)、 画像を手動で追加 にチェックを入れて、 単独のキャリブレーションボードの画像を追加、位置姿勢を記録 をクリックし、校正する画像を追加して位置姿勢を記録します。
注意
下図に示すように、キャリブレーション中に明らかな偏差を検出したというプロンプトボックスが表示される場合があります。ロボットの絶対精度が失われたかどうかを確認することをお薦めします。または Ignore をクリックして、このキャリブレーションプロセスを続行することはできますが、キャリブレーションの精度は保証できません。

カメラのパラメータを計算¶
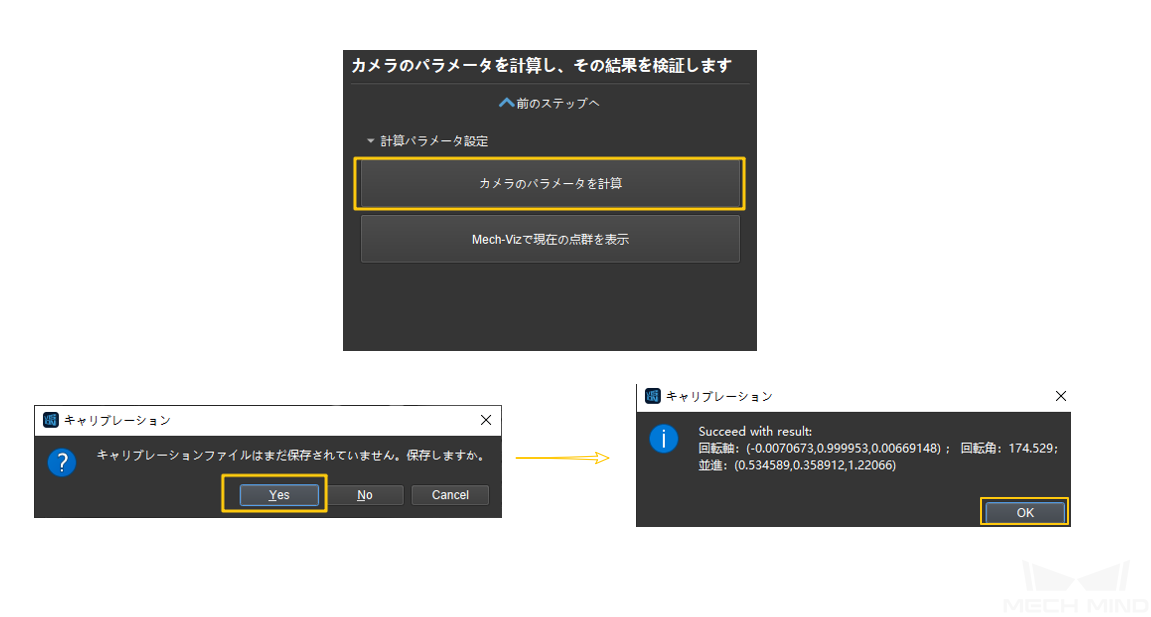
下図に示すように、 カメラのパラメータを計算 ボタンをクリックして、キャリブレーションパラメータをそれぞれ保存して確認します。
Mech-Vizで現在の点群を表示 をクリックします。

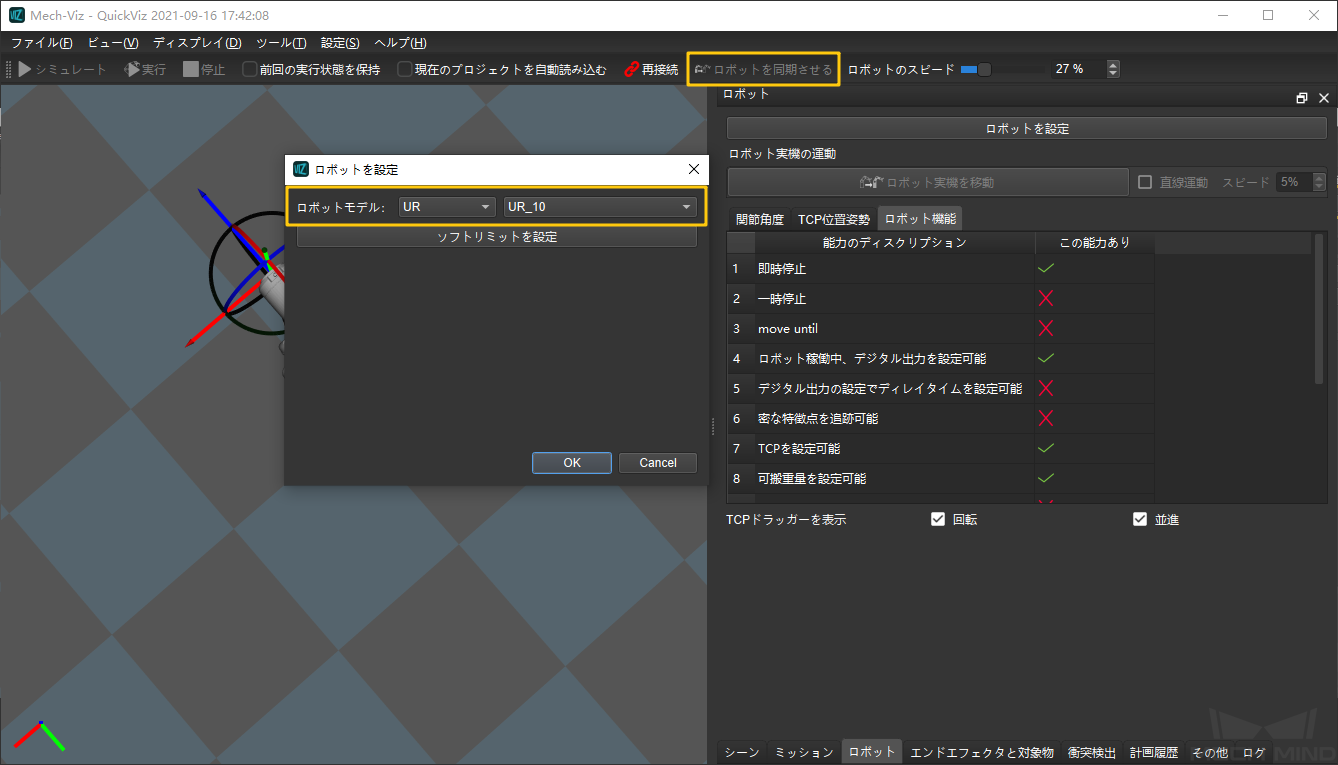
次に、下図に示すように、Mech-Vizインターフェイスに入り、 ロボット パネルをクリックして、接続しているロボットの型番を選択し、 ロボットを同期させる をクリックします。
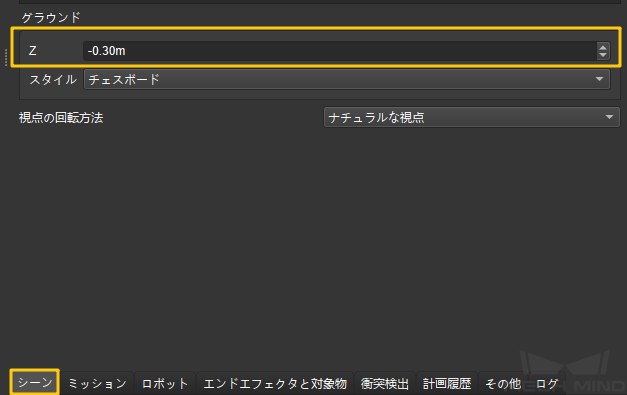
下図に示すように、Mech-Vizで シーン タブをクリックし、地面の高さを適切に調整します。
Mech-Vizの3Dシミュレーション画面でキャリブレーションボードの点群画像が使用できることを確認します。
Mech-Visionで 保存 をクリックしてキャリブレーションの結果を指定する場所に保存します。
カメラパラメータを変更¶
注釈
4軸ロボットまたはその他の回転が制限されるロボットは、外部パラメータZ値を手動で変更する必要があります。
カメラパラメータを調整 画面で 外部パラメータのZ方向並進のみを調整 を選択して Z方向並進 を設定します。それで 保存 をクリックしてキャリブレーションの結果を指定したプロジェクトディレクトリに保存します。
または、カメラパラメータを調整 画面で 外部パラメータをすべて調整 をクリックして外部パラメータを調整します。それで 保存 をクリックしてキャリブレーションの結果を指定したプロジェクトディレクトリに保存します。
これでキャリブレーションのプロセスが完了します。