クイックキャリブレーション¶
カメラの交換に必要な時間、ワークステーションのスペースが限られている、または治具の分解と組み立てが不便なシーンでは、ユーザーはクイックモードを使用して、同じ型番のカメラをすばやく簡単に交換します。
カメラ交換前の準備¶
クイックキャリブレーションモードを使用してカメラをキャリブレーションする前に、ユーザーは以下のことを行う必要があります。
古いカメラと、標準の外部パラメータキャリブレーションモードでキャリブレーションされたカメラパラメータグループを準備します。
カメラに適したキャリブレーションボードのタイプを選択します。そして、キャリブレーションボードをカメラの視野内にあり、通常の作業に影響を与えない便利な場所で取り付けて固定します(このキャリブレーションボードは移動および損傷できません)。
Eye In Handモード:ロボットを適切な位置姿勢に移動した後、Mech-Vizプロジェクトまたは第三者のマスター制御プログラムを通じてこの位置姿勢を記録します。「特徴点を記録するときのロボット位置姿勢」が「新しいカメラをキャリブレーション時のロボット位置姿勢」と一致していることを確認してください。
特徴点の記録¶
を順番にクリックして、クイックキャリブレーションモードに入ります。プロジェクトがMech-Visionで開かれている場合、記録された特徴点データはこのプロジェクトパスの下に保存されます。プロジェクトが開かれていない場合は、プロジェクトパスを手動で選択する必要があります。プロジェクトが特徴点を記録したことがない場合は 図1に示す画面に入ります。
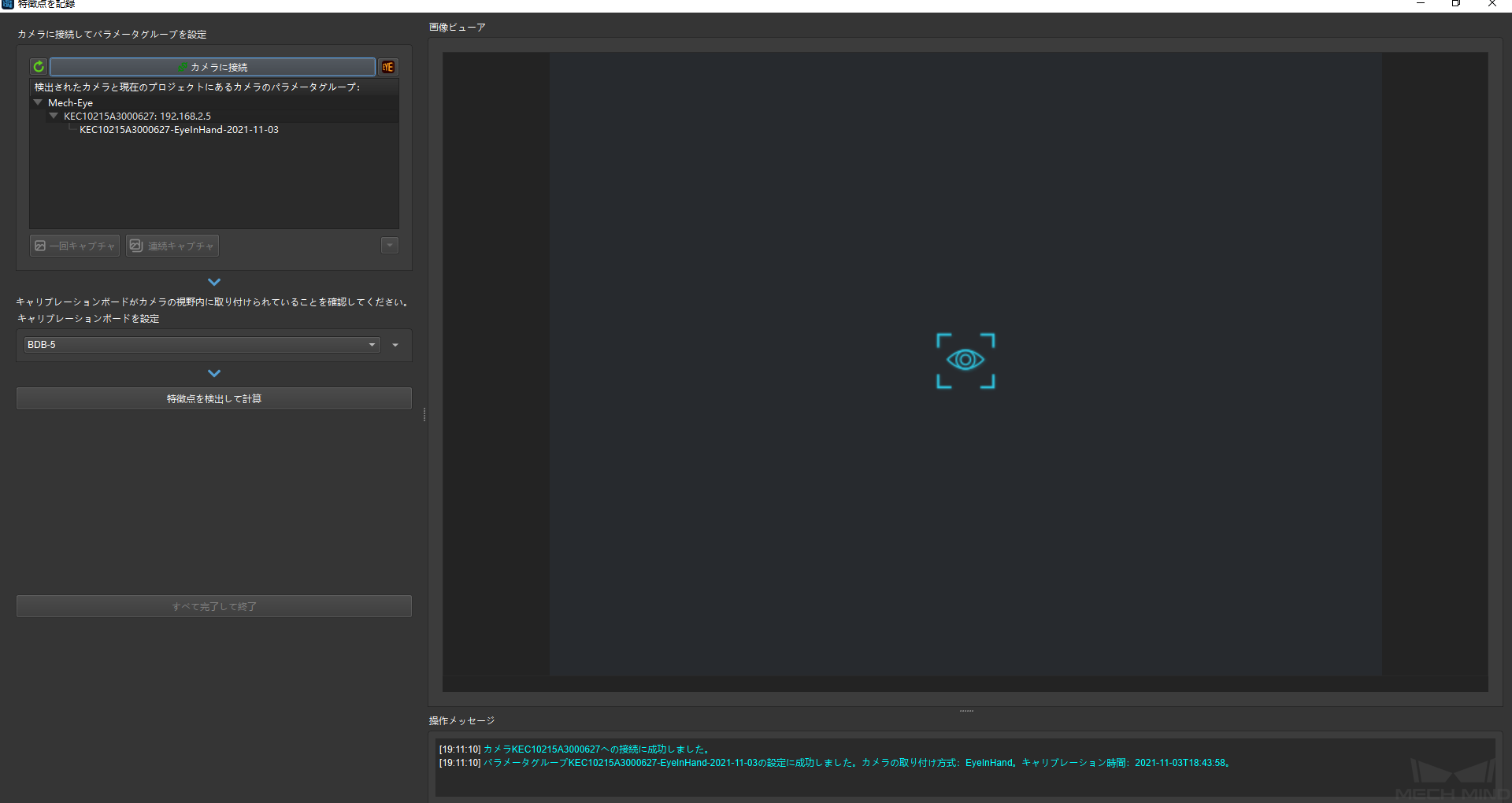
図1 特徴点の記録画面¶
プロジェクトに特徴点が記録されている場合、 図2に示すようなウィンドウをポップアップします。新しいカメラを使用してクイックキャリブレーションを行う前に、外部パラメータグループが更新され、キャリブレーションボードの位置が移動または損傷し、ロボット位置姿勢が変更された場合は、 「固定特徴点を再記録」 をチェックしてください。
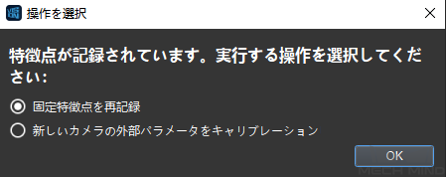
図2 特徴点を再記録するか、新しいカメラキャリブレーションを開始するかを選択¶
特徴点の記録画面に入った後、最初にカメラを接続し、対応する外部パラメータグループを選択します。カメラにパラメータグループが1つしかない場合は、手動で選択する必要はありません。
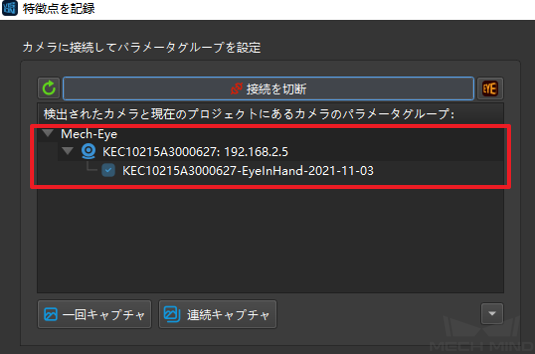
図3 カメラに接続して外部パラメータグループの設定¶
次に、使用するキャリブレーションボードのタイプを選択します。設定後、 特徴点を検出して計算 をクリックして特徴点の記録を開始します。 すべて完了して終了 ボタンがオンになっている場合は、特徴点が記録されたことを意味します。 すべて完了して終了 をクリックします。
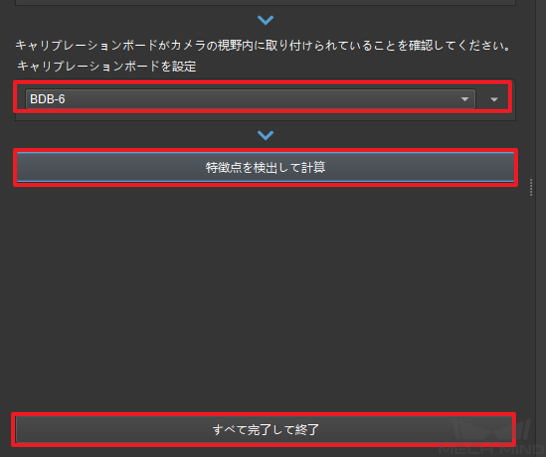
図4 キャリブレーションボートのタイプを設定して特徴点を計算¶
記録後、プロジェクトフォルダに特徴点フォルダが生成されました。新しいカメラを交換した後、プロジェクトはクイックキャリブレーションを開始できます。
図5 特徴点のフォルダ¶
新しいカメラのクイックキャリブレーション¶
クイックキャリブレーションモードに入り、 図6に示すウィンドウで 新しいカメラの外部パラメータをキャリブレーション を選択します。
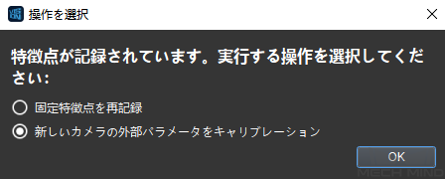
図6 特徴点を再記録するか、新しいカメラのキャリブレーションを開始するかを選択¶
新しいカメラの外部パラメータをキャリブレーション を選択すると、図7のようなクイックキャリブレーション画面に入ります。まずは新しいカメラを接続します。次に、 特徴点を検出して計算 をクリックし、最後に すべて完了して終了 をクリックします。操作通知バーに現在の進行状況がリアルタイムに表示されます。
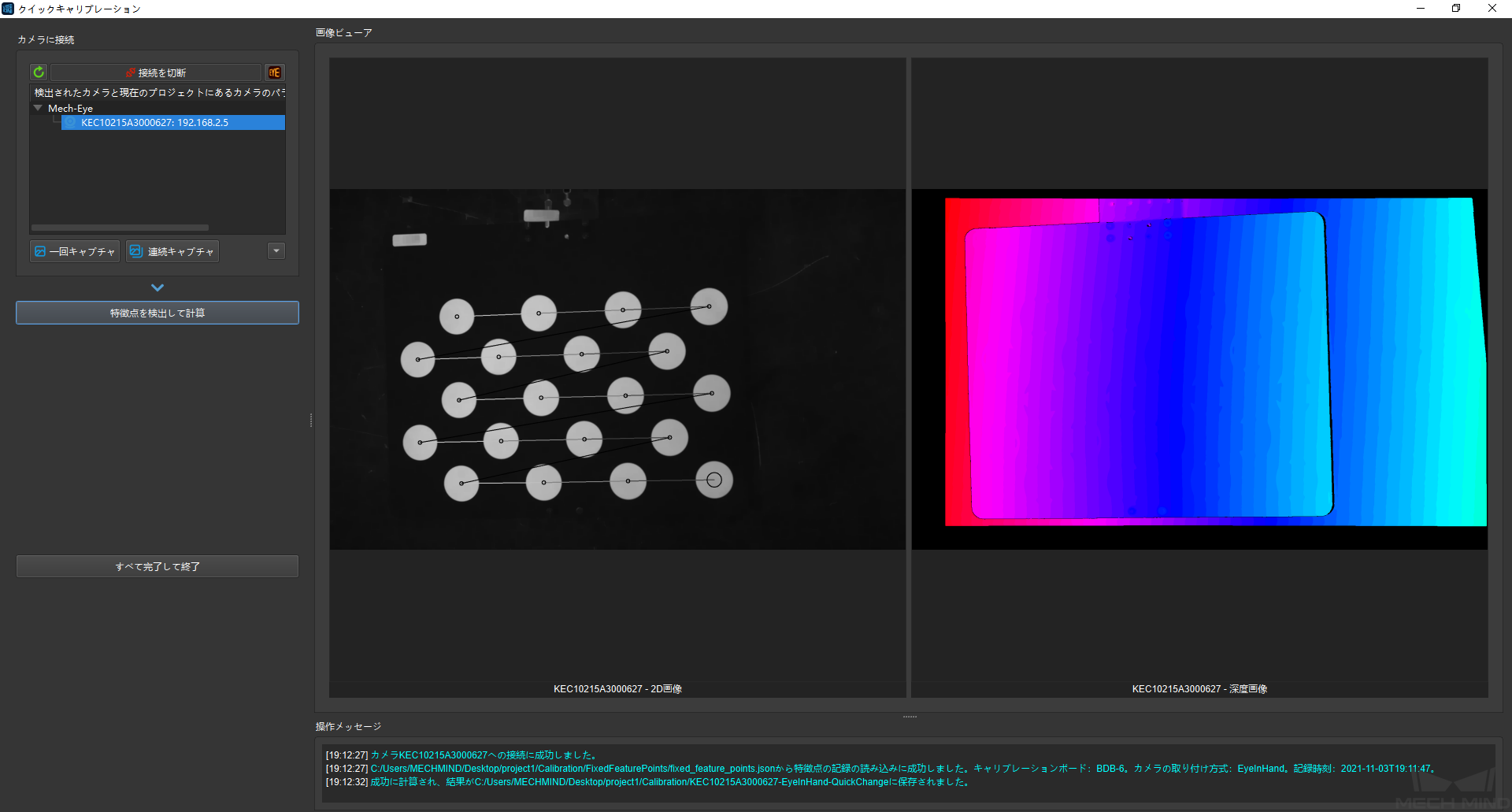
図7 新しいカメラのキャリブレーション¶
キャリブレーションが完了したら、ビジョンプロジェクトでカメラとパラメータグループを切り替えることができます。クイックキャリブレーションによって取得された新しいカメラパラメータグループのフォルダの場所は、図8に示します。
図8 新しいカメラのパラメータグループフォルダ¶