事前準備¶
以下は、ロボットハンド・アイ・キャリブレーションを実行する前に必要な事前準備です。
Mech-Mindビジョンシステムの構築
本節に記載されている内容の理解
キャリブレーションボードの取り付け・配置
キャリブレーションボード点群画像生成の調整
Mech-Mindビジョンシステムの構築¶
ロボットハンド・アイ・キャリブレーションを実行する前に、Mech-Mindビジョンシステムを構成するソフトウェアを接続してください。
Mech-Eye Viewer 、Mech-Center 、 Mech-Vision 、 Mech-Vizを使用します。これらのソフトウェアをインストールして最新バージョンにアップグレードしてください。
また、ロボット通信設定 を参照してロボットの通信設定と接続を実行し、Mech-Centerでロボットが接続されたことを確認してください。
本節に記載されている内容の理解¶
実行する前に、ロボットハンド・アイ・キャリブレーションの概念やタイプ、実行方式、使用シーンなどについてよく理解してください。
キャリブレーションボードの取り付け・配置¶
キャリブレーションの効率を向上させるために、ロボットハンド・アイ・キャリブレーションを実行する前にキャリブレーションボードを正しく取り付けて配置してください。
正常なキャリブレーションボード(ドットがはっきり見える、明らかなキズや曲げ、変形もない)を一つ用意します。
キャリブレーションボードの取り付け・配置
ランダムなキャリブレーションボード位置姿勢を使用するETH方式では、まずはロボット専用のキャリブレーションボードのコネクタをロボットのエンドフランジに取り付けてから、キャリブレーションボードをコネクタに取り付けます。キャリブレーションボードがしっかりと取り付けられていること、およびキャリブレーションボードがロボットエンドのXY平面に平行であることを確認してください。
注釈
ロボットフランジに取り外しができない治具がある場合、キャリブレーションボードを治具に直接固定します。
他の場合に、キャリブレーションボードを作業平面の中央に平らに配置します。
注釈
他の場合は:
ランダムなキャリブレーションボード位置姿勢を使用するEIH方式
TCPタッチ方法を使用するETH方式
TCPタッチ方法を使用するEIH方式
キャリブレーションボードの取り付けと配置は下図(左図は取り付け、右図は配置)に示します。
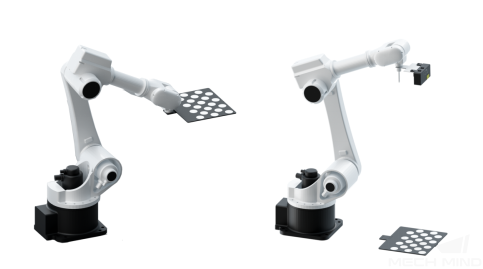
キャリブレーションボードを取り付けた後、ロボットをキャリブレーションの開始位置に移動させます。下図に示すように、左側は取り付け方式で、右側は配置方式です。
キャリブレーションボードを取り付けるとき、ロボットの開始位置はカメラ視野の最下部中央位置にあります(ロボットがボードを下から上へと移動させ、各層でキャリブレーションします)。
キャリブレーションボードを配置するとき、ロボットの開始位置はカメラ稼働位置です(ロボットがボードを下から上へと移動させ、各層でキャリブレーションします)。

キャリブレーションボード点群画像生成の調整¶
Mech-Eye Viewerソフトウェアを起動し、カメラのパラメータを調整します。
2Dパラメータ を調整して、2D画像にキャリブレーションボードがはっきり見られ、露出過度や露出不足などがないようにします。
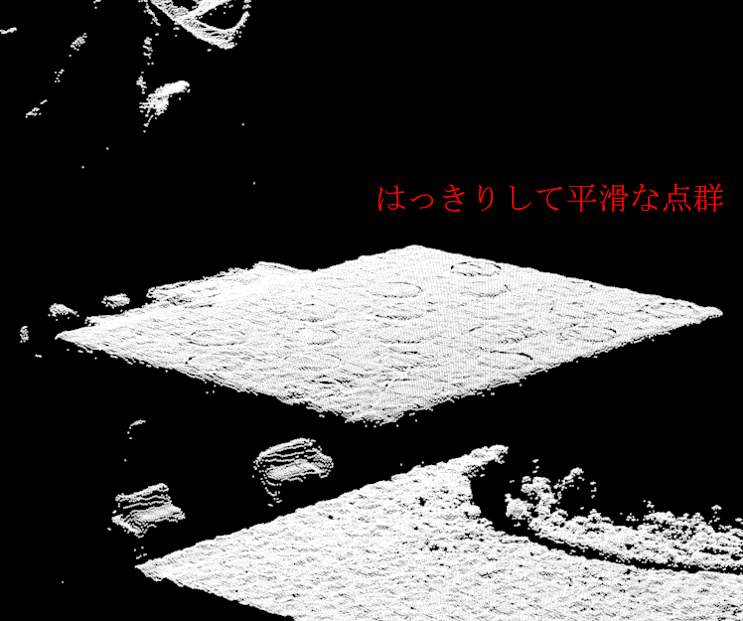
3Dパラメータ を調整して、キャリブレーションボード上のドット点群が完全に見られるようにします。点群の変動範囲を小さくするために、 点群後処理 の中の 点群平滑化 と ノイズ除去 をNormalに設定するようお薦めします。
注釈
現場では、環境光が複雑な場合、2D画像や点群への影響を軽減するために、遮光・補光することをお薦めします。
上記のステップを実行して、キャリブレーションボード上のドット点群が下図に示すように、完全で輪郭がはっきり表示されていることを確認してください。