キャリブレーション結果の確認と分析¶
校正済み外部パラメータデータを確認し、その精度が要求を満たすかどうかを判断する必要があります。誤差が通常の範囲を超えた場合は、原因を突き止めて問題を解決し、外部パラメータが要求を満たすまで再校正を行う必要があります。
キャリブレーション結果の確認¶
図1に示すように、カメラパラメータ計算画面では、キャリブレーションの結果を計算した後、誤差点群が表示されます。誤差点群は、各校正位置姿勢におけるキャリブレーションボードドットの真の値と計算値との偏差を示すために使用されます。
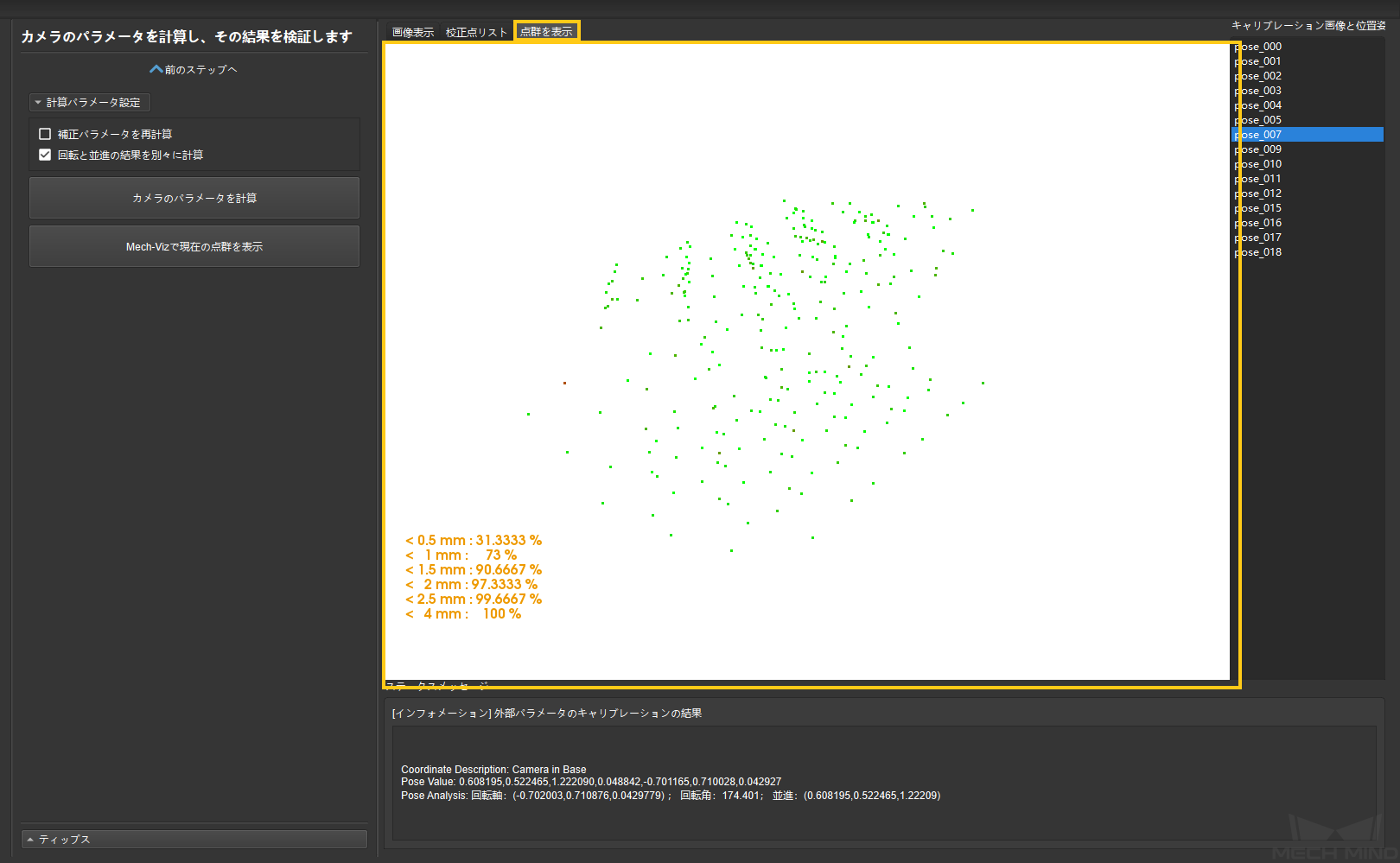
図1 誤差点群を示す¶
誤差点群の色は誤差レベルを示しており(0.5mmにつき1つの誤差レベル)、緑から赤へ、色が濃くなればなるほど、その点の誤差が大きくなります。
表示ボックスをクリックし、英語入力モードで数字キー(0-9)を押すと、対応誤差レベルの点が点群の中にハイライト表示されます(0は0.5mm未満の誤差の点、1は0.5mmから1mmまでの誤差のポイント、等々)。 図2ハイライト表示されているポイントは、誤差が0.5mm以下のデータポイントです(0を押した結果)。
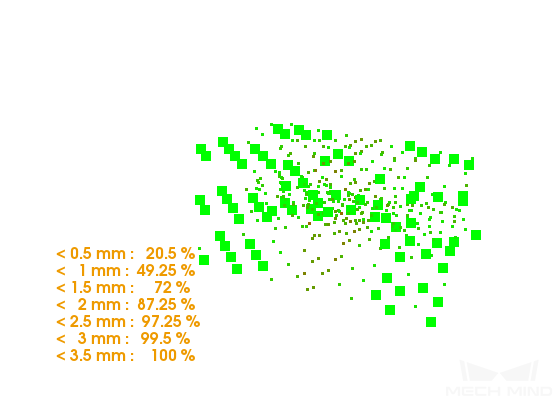
図2 誤差点群の説明¶
図3にハイライト表示されている点は、誤差が2.0-2.5mmのデータポイントです(数字キー4を押した結果)。
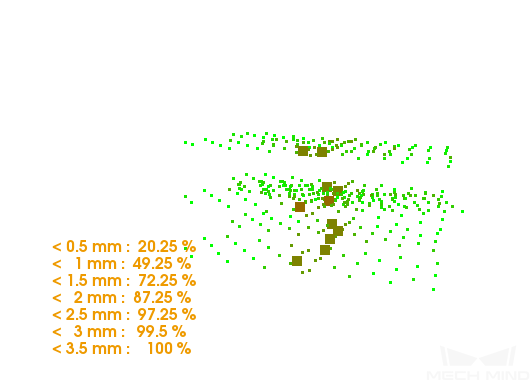
図3 誤差点群の説明¶
図4に示すように、誤差点群を表示した後、Mech-Visionの ログ には、誤差の計算結果が同時に表示されます。
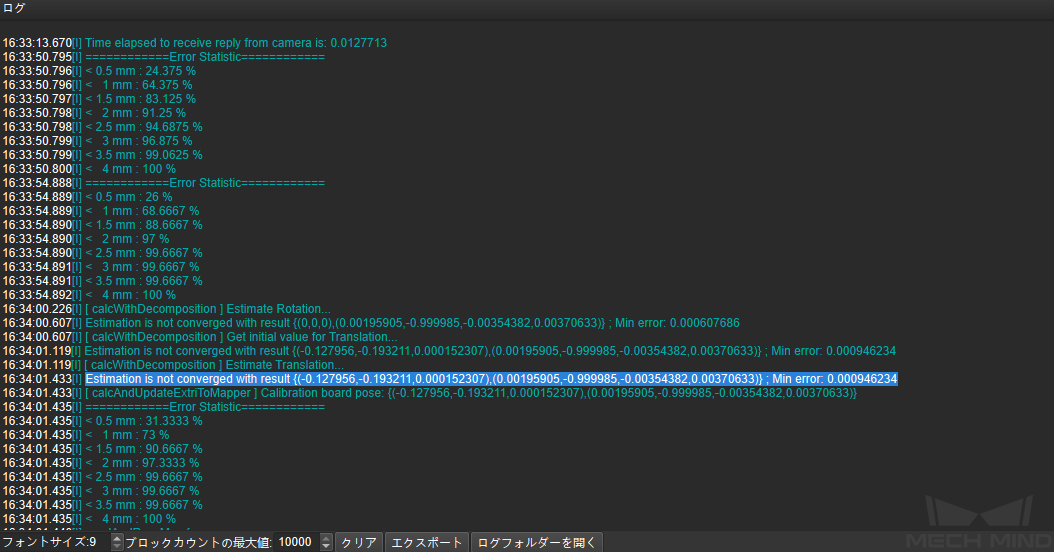
図4 誤差表示¶
以下のように、キャリブレーションの結果は、Mech-Vizの点群画像によって大まかに確認することもできます。
ETH方式で外部パラメータ計算の結果を取得した後、ロボットをカメラの視野に移動させ、 Mech-Vizで現在の点群を表示 をクリックすると、キャプチャしたロボットの点群をMech-Vizソフトウェアで表示することができます。図5に示すように、理想的には、ロボットの点群がロボットモデルとほぼ重なります(但し、Mech-Vizのロボットモデルは、実際のロボットの外観とは完全に重複しないため、外部パラメータの微調整の基準にはなれません)。
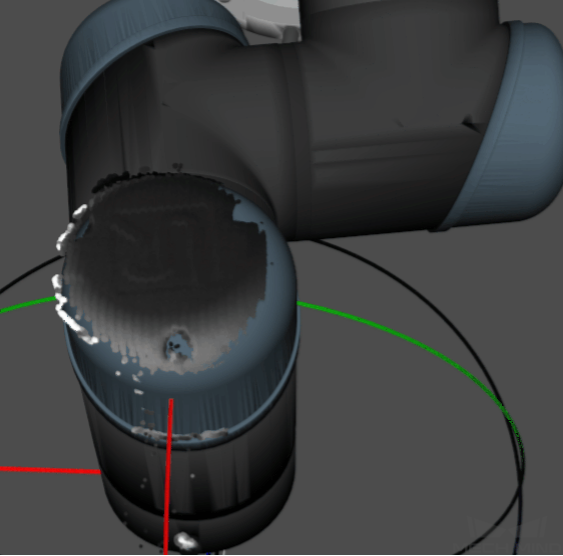
図5 ロボット点群とロボットモデルとの重複度¶
図6に示すように、EIH方式では、まずキャリブレーションボードを固定位置に置きます。その後、カメラの位置姿勢を変えてキャリブレーションボードの画像を数回スキャンし、キャリブレーションボードの点群がロボットのベース座標に対して明らかなオフセットがあるかを確認することができます。
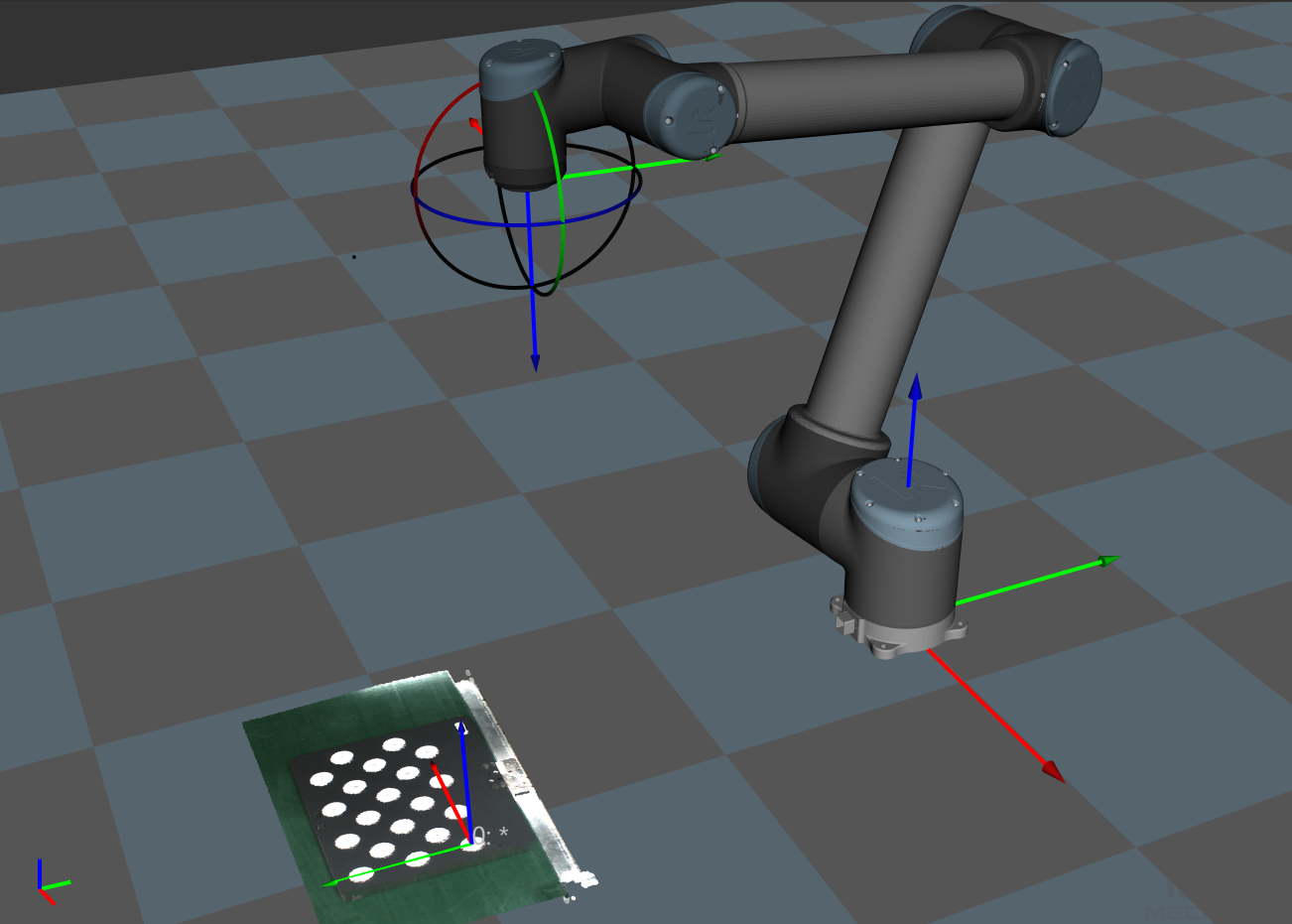
図6 キャリブレーションボードの点群¶
注意
EIH方式では、ロボットに接続しなければロボットの位置姿勢をリアルタイムに取得できません。Mech-Vizで表示される点群を正確にチェックできるためには、ロボットの現在の撮影位置姿勢を入力する必要があります。大まかに見るだけでは、誤差補正の根拠になれません。
キャリブレーション結果の分析¶
キャリブレーション結果の評価指標
校正済み外部パラメータデータについては、精度の要求を満たすかどうかを判断する必要があります。点群誤差の基準は以下の通りです。
一般的なシーンでは、全てのデータポイントの許容誤差が3mm以下です。即ち、誤差3mm以下のデータポイントが100%に達します。
高精度シーンでは、全てのデータポイントの許容誤差が2mm以下です。即ち、誤差2mm以下のデータポイントが100%に達します。
パレタイジングシーンでは、全てのデータポイントの許容誤差が5mm以下です。即ち、誤差5mm以下のデータポイントが100%に達します。
上記は基準値であり、具体的には作業現場の工程精度の要求に従うものとします。
キャリブレーション精度に影響する要因
校正済み外部パラメーターデータの精度が要求を満たさない場合は、誤差の原因を突き止める必要があります。以下の通りに、キャリブレーションデータを1つずつ確認し、原因をチェックしてください。
キャリブレーションデータ問題の有無の確認¶
校正データとは、校正時に生成した校正点のデータを指します。それがカメラ番号フォルダ内のcalib_data.jsonファイルに保存されます。該ファイルには校正点のフランジ位置姿勢や角点の認識データなどが記録されています。カメラのキャリブレーションデータを読み込む際に、 仮想カメラによるキャリブレーションデータを読み込む にチェックを入れると、自動的にファイルが読み取られ、校正点のデータが読み込まれます。
主に以下の三つの方面で、このデータの確認を行います。
フランジ位置姿勢のオイラー角の変化について、ピラミッド経路に沿う校正点(回転の校正点を含めないことにご注意ください)を確認します。
図7に示すように、 キャリブレーション画像と位置姿勢リスト の校正点、 校正点データを表示 をクリックしてから、現在の校正点のフランジ位置姿勢を確認することができます。
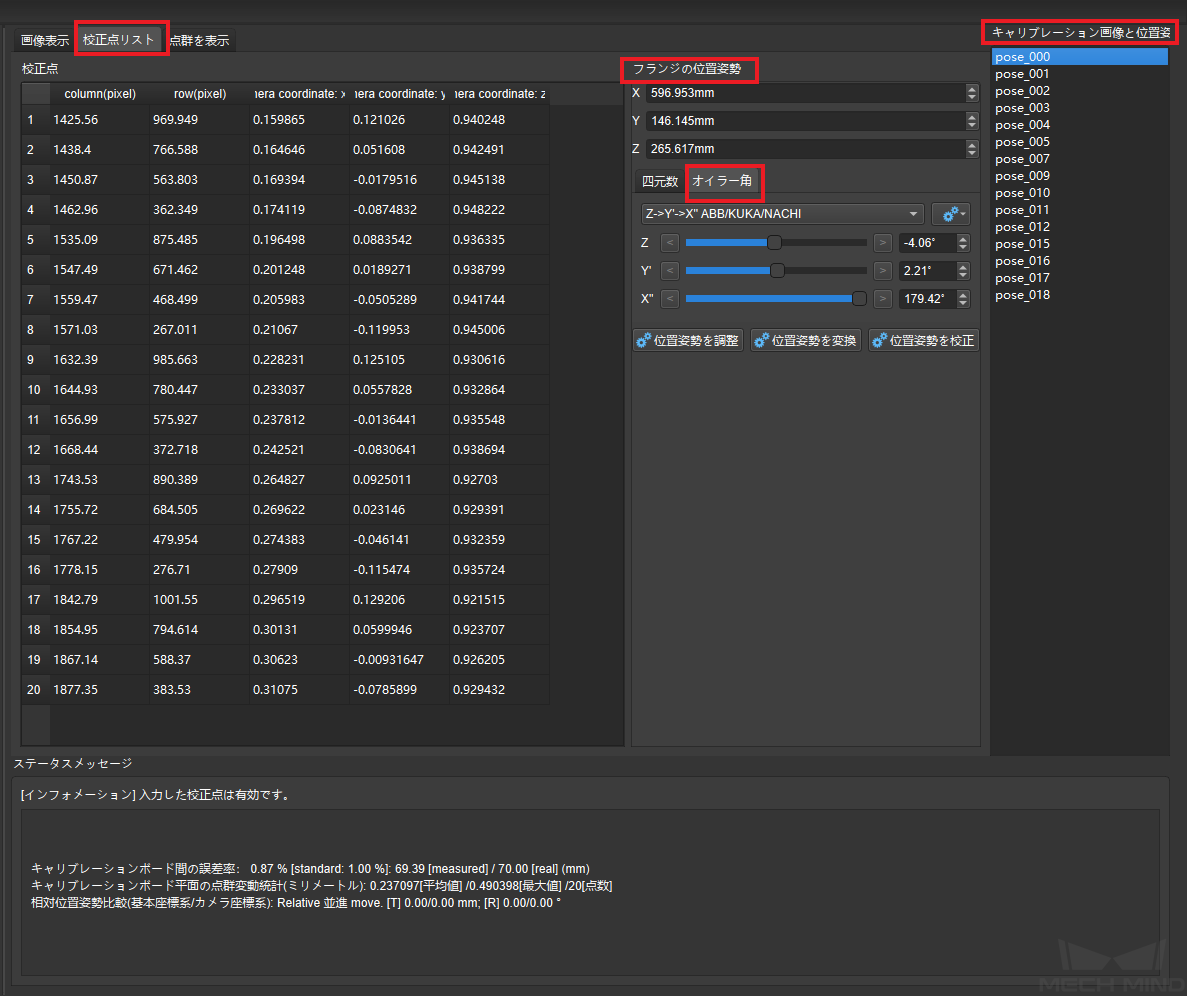
図7 校正点フランジの位置姿勢¶
注釈
図7の中で、column(pixel)とrow(pixel)は、現在校正点の2D画像におけるキャリブレーションボードの全てのドット円心のピクセル座標を表します。camera_coordinate:x(m)/y(m)/z(m)は、現在校正点の深度画像におけるキャリブレーションボードのドット円心のカメラ座標系に基づく座標を表しています。
ピラミッド経路を取るとき、ロボットが自身のベース座標(Base)或いはフランジ(Flange)に沿って移動します。回転がないため、オイラー角の変化はありませんが、ロボットによって精度が異なるため、その値は上下に変動します。変動が1度を超えたたら、ロボットの零点が失われて、又は精度が下がるなどの可能性があります。
ソリューション:この場合には、ハンド・アイ・キャリブレーションは使用できません。ロボットの零点をチェック(再位置決め)して、問題を解決しなければ、続いてキャリブレーションすることはできません。
校正点の「キャリブレーションボード間の誤差率」が基準値に超えたかどうかを確認します。
校正点を選択して、下のメッセージボックスに キャリブレーションボード間の誤差率 が表示されます。基準値を超えると、黄色い校正点に変わります。 キャリブレーションボード間の誤差率 は、内部パラメータの検査結果の一部として、現在のカメラ内部パラメータの誤差値を部分的に反映します。
ソリューション:精度への要求が高くない場合では、内部パラメータが基準値をわずかに超えても使用できますが、高精度の場合や基準値を大幅に超えた場合は、再校正するか(内部パラメータの校正には大きなキャリブレーションチェスボードを使用するのが最適です)、工場にカメラを交換することをお薦めします。
注釈
内部パラメータの誤差はキャリブレーションの結果に影響を与えますが、誤差が基準値以内であれば、一般的には問題ありません。
校正点の「キャリブレーションボード平面の点群変動統計」の最大値が3mmを超えたかどうかを確認します。
キャリブレーションボード平面の点群変動統計 とは、キャリブレーションボードの全てのドットの円心がフィッティング平面に基づく上下変動を表しており、その値は外部パラメータの精度に直接影響します。精度への要求が高ければ高いほど、点群変動統計には必要とされる値は小さくなります。一般的には、最大値を3mm以下に設定しなければなりません。3つ以上の校正点の変動が3mmを超えたら、全体的な精度が確保しにくいので、問題を排除して再校正を行う必要があります。問題を引き起こす要因は、2つ部分に分けられます。
一つは、不適切なカメラの3D露出調整です。 点群平滑化 と ノイズ除去 のチェックを外したり、またはカメラゲインをチェックしたりする操作が原因です。
ソリューション:「点群平滑化」と「ノイズ除去」にチェックを入れ、カメラゲインをオフにすることで3D露出を調整します。調整しても完全なキャリブレーションボードのドット点群を取得できない場合は、現場で遮光が必要となります。
二つは、ETH自動校正方式では、キャリブレーションボードがロボットフランジのエンドにしっかりと固定されておらず、校正中のロボットの動きが速すぎるため、カメラスキャン時にボードのぶれが発生し、点群が大きく変動します。
ソリューション:ロボットの移動速度を下げ、キャリブレーションボードをしっかり取り付け、カメラの待ち時間を長くします。
内部パラメータ確認の中、 キャリブレーションボード間の誤差率 と キャリブレーションボード平面の点群変動統計 は 図8のように示します。
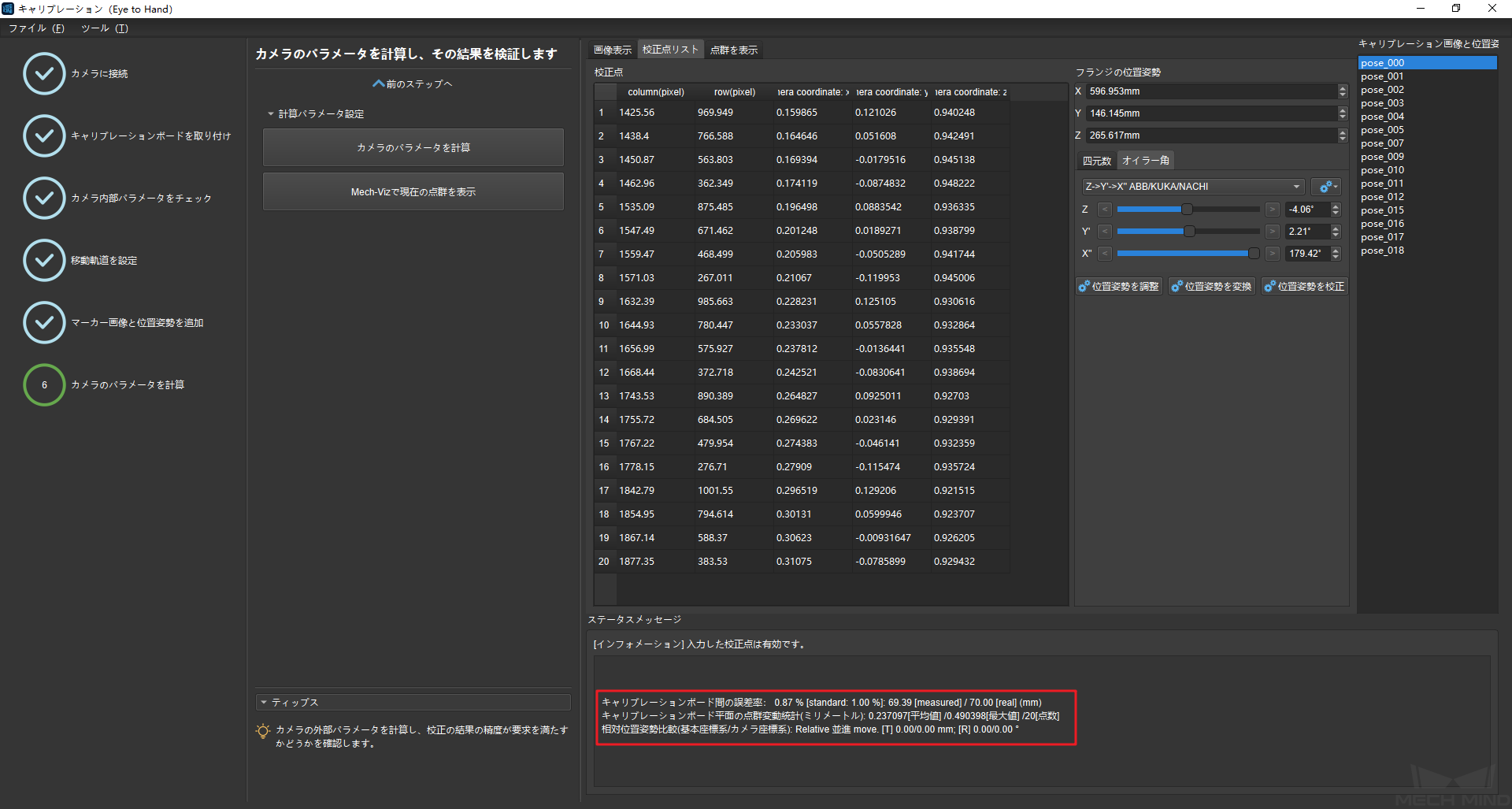
図8 内部パラメータと点群変動の確認¶
補正パラメータの再計算¶
補正パラメータとは、校正エリアに対してブロック分割によって計算したパラメータ値を指します。通常は、工場出荷時にカメラの実際の最大動作範囲に合わせた値を表示します。
注釈
実際の作業現場のキャリブレーション条件がカメラ出荷時と一致しない可能性もあるため、工場出荷時の補正パラメータが適用しない可能性があります。
キャリブレーションデータを上記の順番で1つずつ確認しても、期待された結果が得られない場合は、 計算パラメータ設定 をクリックし、 補正パラメータを再計算 にチェックを入れて、図9に示すようにカメラのパラメータを再計算します。
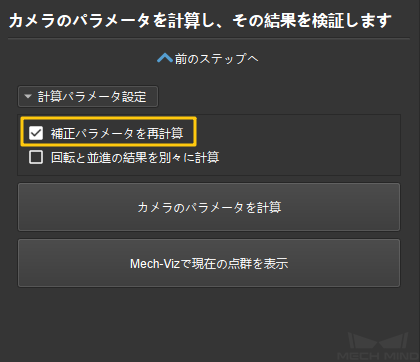
図9 補正パラメータの計算¶
注意
補正パラメータを再計算 にチェックを入れる前に、元のextri_param.json外部パラメータファイルをバックアップし、工場出荷時の補正パラメータと名付けてください。
上記の方法で問題を確認、解決後、プロジェクトで要求される精度が得られるまで外部パラメータを再校正します。以上で外部パラメータの校正が完了です。
注釈
外部パラメータ校正後、カメラのパラメータを実際の動作状態に変更してください。